CIP-2021 : B63C 11/42 : con control independiente de propulsión y de dirección.
CIP-2021 › B › B63 › B63C › B63C 11/00 › B63C 11/42[3] › con control independiente de propulsión y de dirección.
Notas[t] desde B60 hasta B66: TRANSPORTES O MANUTENCION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B63 BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS.
B63C BOTADURA, VARADO, O PUESTA EN DIQUE SECO DE BUQUES; SALVAMENTO EN LA MAR; EQUIPOS PARA PERMANECER O TRABAJAR BAJO EL AGUA; MEDIOS DE LOCALIZACION O RECUPERACION DE OBJETOS SUMERGIDOS (redes flotantes, rampas de amerizaje flotantes o dispositivos similares para la recuperación de aviones del agua B63B 35/52).
B63C 11/00 Equipo para permanecer o trabajar bajo el agua; Medios para buscar objetos sumergidos (composiciones químicas para utilizarlas en aparatos de respiración A62D 9/00; accesorios o equipos para la natación A63B 31/00 - A63B 35/00; submarinos B63G 8/00).
B63C 11/42 · · · con control independiente de propulsión y de dirección.
CIP2021: Invenciones publicadas en esta sección.
SISTEMA DE AJUSTE DE MOTORES PARA VEHÍCULOS SUBMARINOS DE OPERACIÓN REMOTA PARA APROVECHAMIENTO DE EMPUJE DE MOTORES.
(16/07/2020). Solicitante/s: UNIVERSIDAD SIMÓN BOLIVAR. Inventor/es: ABRIL HOWARD,Omar Santiago, VILLAREAL GONZALEZ,Reynaldo Farid, PESTANA NOBLES,Juan Pablo, OCHOA PERTUZ,Carlos Andres, RODRIGUEZ,Eugenio Yime.
La presente invención pertenece al campo de buques u otras embarcaciones flotantes, sus equipos y medios de localización o recuperación de objetos sumergidos; específicamente relacionado con un equipo para permanecer bajo el agua, los medios para buscar objetos sumergidos con cámaras de buceo unidas mecánicamente a una base de tipo cerrado con control independiente de propulsión y de dirección que consiste en un submarino tipo Vehículo Operado Remotamente (ROV - Remote Operated Vehicle) con seis motores: cuatro motores con empuje en el eje horizontal y dos motores con empuje el eje vertical; donde los motores de empuje horizontal cuentan giran sobre un eje en un ángulo de 0 a 45 grados y donde los motores están ubicados en una estructura adicional que permite el giro y bloqueo de los motores según el ecosistema o las condiciones ambientales a las cuales el Vehículo Operado Remotamente va a ser expuesto).
DISPOSITIVO ROBOTICO SUMERGIBLE PARA CAPTURA DE IMAGEN.
(04/10/2018). Solicitante/s: FUNDACION UNIVERSIDAD DE BOGOTA JORGE TADEO LOZANO. Inventor/es: VASQUEZ MIRANDA,Leonardo, ALVAREZ ROMERO,Fernando Alberto, PULIDO MARIN,Alexander.
Se relaciona la presente invención con el ramo de la ingeniería mecánica, particularmente con un dispositivo robótico sumergible que se desplaza sobre cables de acero, que registra de manera autónoma imágenes y video del relieve marino optimizando el trabajo de los biólogos marinos ya que controla el desplazamiento, utilizando cámaras que controlan el enfoque, desplazamiento, estabilidad y permiten una captura en secuencia de todo el trayecto lo mismo que la grabación de video. Disminuye la cantidad de buzos, el tiempo requerido en la inmersión y el riesgo existente al hacer el registro, por lo tanto, ahorra costos, mejora la calidad del material recopilado, optimizando el procedimiento.
VEHICULO SUBMARINO NO TRIPULADO PARA INSPECCION DE EMISARIOS.
(29/05/2018). Solicitante/s: Seys MedioAmbiente, S.L. Inventor/es: DEL CASTILLO IGAREDA,Jesús Antonio, DEL CASTILLO IGAREDA,José Ángel.
1. Vehículo submarino no tripulado (ROV) para inspección de emisarios caracterizado por estar constituido por los siguientes elementos.
Un vehículo submarino no tripulado en cuyo interior cuenta con:
- un potente motor eléctrico,
- una batería de suministro de corriente a todos los elementos y
- una batería de respeto para el caso de fallo de la principal,
- un dispositivo de geo-posicionamiento,
- una C.P.U. de control de recepción de órdenes de velocidad y dirección, de recogida de datos y emisión de los mismos.
Y en su parte exterior cuenta con:
- una tobera de propulsión,
- un timón de dirección,
- un timón de profundidad,
- un foco led de gran potencia,
- una cámara de alta resolución,
- una antena de recepción - emisión de datos,
- un sensor de salinidad,
- un sensor de pH,
- un sensor de conductividad,
- un sensor de temperatura,
- un sensor de DBO5,
- un sensor de DQO.
PDF original: ES-1213285_U.pdf
Dispositivo para dragar material de suelo bajo el agua.
(25/04/2018). Solicitante/s: Tideway B.V. Inventor/es: GABRIËL,JAN, HEILER,JOHAN, HAGENAERS,GWYN, BROUNS,GERT.
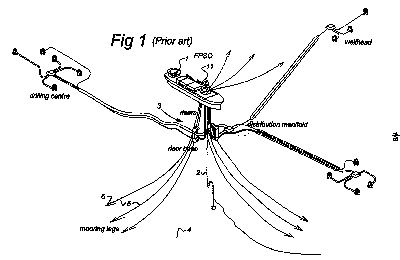
Dispositivo para verter material sobre un fondo o instalación submarina, tal como una canalización, comprendiendo el dispositivo:
- una embarcación , provista de una tubería bajante a través de la que se vierte el material sobre el fondo submarino;
- un dispositivo de dirección , adaptado para controlar el movimiento de la tubería bajante con respecto al fondo submarino;
caracterizado por que el dispositivo comprende adicionalmente:
- primeros medios de monitorización , adaptados para monitorizar el estado del fondo submarino;
- segundos medios de monitorización , adaptados para monitorizar la posición del dispositivo de dirección con respecto al fondo; y
- medios de registro , adaptados para registrar, basándose en los datos obtenidos de los primeros y/o segundos medios de monitorización, las señales de control para mover el dispositivo de dirección.
PDF original: ES-2678124_T3.pdf
Vehículo planeador submarino.
(23/01/2015) 1. Vehículo planeador submarino compuesto de un cuerpo principal , un cuerpo de entrada , un cuerpo de salida y una superficie sustentadora tipo ala elíptica caracterizado por el uso de una propulsión por sustentación.
2. Vehículo planeador submarino según la reivindicación 1 caracterizado por un sistema hidráulico de flotabilidad, alojado en el cuerpo principal , que induce un movimiento de arfada en el vehículo, el cual en conjunto con una superficie sustentadora tipo ala elíptica dotan al vehículo de una propulsión por sustentación.
3. Vehículo planeador submarino según la reivindicación 1 caracterizado por el uso de un sistema electromecánico, alojado dentro del cuerpo principal , para el control del cabeceo y el balance del vehículo.
4. Vehículo planeador submarino según…
VEHICULO SUBMARINO OPERADO POR CONTROL REMOTO.
(11/01/2010) Vehículo submarino operado por control remoto que comprende el propio vehículo y una unidad de control exterior, encargada de suministrar al vehículo señales de control de los propulsores para maniobrar el vehículo y gestionar las señales de datos de sensores e instrumentos del vehículo . El vehículo está configurado de forma modular, integrando una pluralidad de módulos encargados del funcionamiento del vehículo , y comprende un casco autoportante no hermético formado por al menos dos partes separables unidas entre sí, teniendo funciones de carenado para reducir la resistencia hidrodinámica y de bastidor sobre el que se montan los módulos, sensores e instrumentos del vehículo , los cuales son montados en el casco mediante elementos de fijación dispuestos en el casco o mediante su colocación en alojamientos dispuestos en el casco
APARATO PARA DESPLEGAR UN OBJETO HASTA UNA POSICION OBJETIVO SUBMARINA Y METODO DE CONTROL DE DICHO APARATO.
(16/05/2005). Ver ilustración. Solicitante/s: BERNARD, FRANCOIS. Inventor/es: BERNARD, FRANCOIS.
Aparato para desplegar un objeto hasta una posición objetivo submarina, dotado de una baliza para transmitir rayos acústicos a un buque en la superficie para determinar la posición del aparato y una pluralidad de propulsores (56(i) i = 1, 2, ...I, siendo I un número entero) para controlar el posicionamiento del aparato con respecto a la posición objetivo submarina, caracterizado en que el aparato está dotado de un reloj de velocidad de sonido para medir de forma continua la velocidad del sonido en un fluido alrededor de dicho aparato y para transmitir los datos de velocidad de sonido en tiempo real a dicho buque en la superficie para la actualización de los perfiles calculados de velocidad de sonido en dicho fluido en función de la profundidad en tiempo real y para corregir dicha determinación de dicha posición.
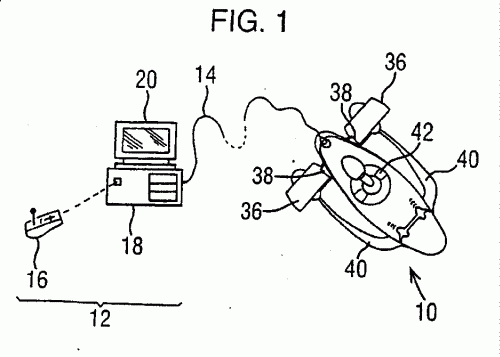
VEHICULOS DE CONTROL REMOTO.
(16/07/2004). Ver ilustración. Solicitante/s: H2EYE (INTERNATIONAL) LIMITED. Inventor/es: SHELTON, CHRIS, D., JAGGER, NIGEL MARK, HOUSEHAM, SHAUN, DAVID, TYSON, LAWRENCE SAMUEL, COOPER, JEREMY DANIEL, DORMER, MICHAEL, WILLIAM, PAOLI, JAN, MATTEO, KEMP, NICHOLAS, IAN, SANDERS, MARK, PULLIN, GRAHAM MICHAEL.
Cable umbilical para un ROV para transportar señales entre una parte sobre cubierta y un sumergible subacuático del ROV, requiriendo el sumergible una alimentación de energía de a bordo, y comprendiendo el cable una envolvente flotante y un núcleo de transporte de la señal de control.
VEHICULO SUBMARINO AUTOPROPULSADO PARA LA DETECCION DE OBJETOS INMERGIDOS.
(16/11/1992). Solicitante/s: ETAT-FRANCAIS REPRESENTE PAR LE DELEGUE GENERAL POUR L'ARMEMENT (DPAG) BERTIN & CIE. Inventor/es: PETRY, MARTIN, GUILLOTEAU, MICHEL, RAGUENES, ARMAND MARIE, VINCENT, RENE.
VEHICULO SUBMARINO AUTOPROPULSADO PARA LA DETECCION DE OBJETOS INMERGIDOS, COMPRENDIENDO UNA PARTE SUPERIOR Y UNA PARTE INFERIOR DECALADAS LONGITUDINALMENTE UNA EN RELACION A LA OTRA, PARA PROCURAR, EN LA DELANTERA DEL VEHICULO, UN ESPACIO LIBRE DE ALOJAMIENTO DE UNA ANTENA DE SONAR Y, EN LA TRASERA, EL PASO Y EL DEBATIMIENTO DE UN CABLE DE ENLACE CON UN BARCO DE SUPERFICIE.
VEHICULO SUMERGIBLE HABITADO Y AUTOPROPULSADO PARA PASEOS SUBMARINOS.
(16/10/1992). Solicitante/s: ONOFRI, JEAN-MICHEL. Inventor/es: ONOFRI, JEAN-MICHEL.
EL VEHICULO LLEVA UN CASCO RESISTENTE EN EL QUE PUEDEN CABER DOS PERSONAS, ESTA PROVISTO DE UNA VENTANA TRANSPARENTE PERIFERICA. ESTE CASCO ESTA FIJADO POR UNIONES ELASTICAS A UNA ESTRUCTURA TUBULAR QUE LLEVA CUATRO BALASTOS EN SU PARTE SUPERIOR, DOS PROPULSORES DE HELICE , UNA CARCASA QUE CONTIENE BATERIA, BOTELLAS DE OXIGENO PARA LA RESPIRACION Y AIRE COMPRIMIDO PARA VACIAR LOS BALASTOS, UN DEPOSITO DE BALASTOS REGULABLE Y UN LASTRO ALARGABLE Y ORIENTABLE, PERMITE VARIAR EL EQUILIBRIO DEL VEHICULO.
{kind=link}
{kind=link}