CIP-2021 : G01S 13/87 : Combinaciones de sistemas de radar, p. ej. radar primario y radar secundario.
CIP-2021 › G › G01 › G01S › G01S 13/00 › G01S 13/87[1] › Combinaciones de sistemas de radar, p. ej. radar primario y radar secundario.
Notas[n] desde G01S 13/00 hasta G01S 17/00: - Los grupos G01S 13/00 - G01S 17/00 cubren :
- los sistemas para detectar la presencia de un objeto, p. ej. por reflexión o por rerradiación desde el mismo objeto o desde un transpondedor asociado al objeto, para determinar la distancia o la velocidad relativa de un objeto, para proporcionar una representación coordenada de la distancia y de la dirección de un objeto o para obtener su imagen;
- los sistemas dispuestos para ser montados en una nave o vehículo móviles y que utilizan la reflexión de ondas en una superficie extensa externa a la nave, p. ej. sobre la superficie de la tierra, para determinar la velocidad y la dirección del movimiento de la nave con relación a la superficie.
- Los grupos G01S 13/00 - G01S 17/00 no cubren :
- los sistemas para determinar la dirección de un objeto por medios que no utilicen la reflexión o la rerradiación, que están cubiertos por los grupos G01S 1/00 o G01S 3/00;
- los sistemas para determinar la distancia o la velocidad de un objeto por medios que no utilicen la reflexión o la rerradiación, que están cubiertos por el grupo G01S 11/00 .
G FISICA.
G01 METROLOGIA; ENSAYOS.
G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS.
G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada.
G01S 13/87 · Combinaciones de sistemas de radar, p. ej. radar primario y radar secundario.
CIP2021: Invenciones publicadas en esta sección.
Proceso de detección de un ave u objeto volador.
(21/08/2013) Proceso de detección de un objeto volador, en particular un ave, al nivel de un solo aerogenerador , en elcual se utilizan medios de detección de al menos un ave u otro objeto volador por ondas radio, en forma deal menos dos radares , caracterizado por que consiste en:
- posicionar dos radares independientes uno de otro ;
- inclinar cada radar sobre su eje horizontal de modo que la altura vertical de la haz de ondas emitida en el eje de dicho aerogenerador por cada radar englobe toda o parte de una esfera formada por el volumen teórico de barrido de las palas en rotación del aerogenerador ;
- transformar la imagen analógica resultante en dos dimensiones de cada radar en una imagendigital independiente para cada radar ;
- aplicar en cada imagen digital…
Medición remota de distancias por medio de una señal de sondeo esencialmente repetitiva.
(10/07/2013) Un procedimiento para la medición remota de distancias de objetos que reflejan señales, con relación a un transceptor de señales, que comprende:
transmitir una señal (E) de sondeo, que está basada en una primera señal (x1) que es repetida con cierta regularidad,recibir una señal (e) portadora de información, que constituye una versión reflejada de la señal (E) de sondeo transmitida,
que ha sido reflejada desde al menos un objeto reflectante,
generar una señal primaria (P1(x1)) sobre la base de la primera señal (x1),
generar una señal secundaria (P2) sobre la base de la señal (e) portadora de información, y
procesar la señal primaria (P1(x1)) y la señal secundaria (P2(x1,x2)), por lo cual se determina al menos una entre unadistancia (Y(t)) y una velocidad relativa (V(t)) para el, al menos, un objeto reflectante, caracterizado por
añadir…
Dispositivo para la determinación de la posición por medio de ondas de radio.
(19/09/2012) Dispositivo para determinar la posición de un vehículo sobre una vía de circulación utilizando ondas de radio quese emiten desde el dispositivo y son reflejadas por el vehículo y recibidas por al menos dos sistemas de antena dispuestos a lo largo de la vía de circulación, caracterizado porque el sistema de antenas comprende unnúmero de elementos de antena , formando uno de los elementos de antena en el sistema de antenarespectivo el centro de fase de los sistemas de antena, y en el que los elementos de antena de lossistemas de antena están conectados entre sí de tal manera que la distancia (d) entre los centros de fase delos sistemas de antena incluidos es menor que la mitad de la anchura de un sistema de antena individual.
Un sistema para prevenir que dos antenas rotativas se iluminen entre sí.
(16/05/2012) Un sistema que comprende una primera (S) y una segunda (M) antena rotativa que funcionan en una mismabanda de radiofrecuencia a bordo de uniades navales, caracterizado porque la velocidad de rotación de la primeraantena (S) varía, para evitar que las dos antenas se iluminen entre sí simultáneamente, proporcionando dichosistema una cobertura completa.
SISTEMA DE VIGILANCIA DE ALTA PRECISIÓN POR MEDIO DE MULTILATERACIÓN DE SEÑALES DE RADAR SECUNDARIO DE VIGILANCIA (SSR).
(09/03/2012) Sistema para localizar e identificar elementos móviles cooperadores que llevan un transpondedor de un radar secundario de vigilancia (SSR) apto para emitir una señal SSR, comprendiendo dicha señal SSR un preámbulo made up por una secuencia de pulsos, dicho sistema que comprende:
una pluralidad de estaciones de medida, que comprenden cada una de ellas una sección de procesado, uno o más transpondedores de referencia instalados en posiciones conocidas y adaptado para emitir una señal SSR, y un subsistema de procesado, en el que la sección de procesado dentro de cada estación de medida está adaptada para procesar señales SSR emitidas por un transpondedor llevado por un elemento móvil o por uno de los transpondedores de referencia, de forma que se obtenga una medida del tiempo…
PROCEDIMIENTO Y CONFIGURACIÓN DE RADAR PARA VIGILAR UNA ZONA DE VIGILANCIA.
(07/07/2011) Procedimiento para vigilar una zona de vigilancia con una configuración de radar mediante emisión continua de una señal de medida con un emisor de radar (en 3) y recepción de una señal de recepción reflejada por un objeto que se ha movido mediante un receptor de radar (en 3) y evaluación de una componente de frecuencia doppler en la señal de recepción para detectar el objeto que se ha movido, en el que para verificar la detección del objeto que se ha movido se interrumpe periódicamente la evaluación de la componente de frecuencia Doppler, en el que al menos un reflector se utiliza en una posición definida para reflejar la señal de medida emitida por el emisor de radar (en 3) hacia el receptor de radar (en 3) y en el que durante la interrupción de la evaluación de la componente de frecuencia Doppler se comprueba a modo…
PROCEDIMIENTO PARA LA VIGILANCIA DEL ESPACIO/ESPACIO AEREO.
(10/12/2009) Procedimiento para la optimización combinatoria automática de la determinación del objetivo de varios objetos móviles por medio de varios (N) sensores (A, B, C) y sus geometrías , caracterizado porque un primer sensor (A) se define como sensor master y se calcula una curva espacial (A1) que se transmite a continuación a la geometría de un sensor (B) definido como sensor slave y se tiene en cuenta en su geometría local , después se define otro sensor (C) como slave, en el que se calculan las curvas espaciales (B1-B3) de la correspondencia obtenida en el paso anterior y éstas se transmiten junto con la curva master (A1) a la geometría del nuevo sensor slave (C) y se tiene en cuenta como geometría nueva , repitiéndose estos pasos al menos hasta que en un último paso (N1) el último sensor restante…
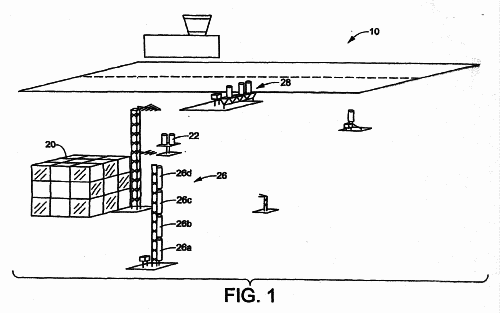
SISTEMA DE ATERRIZAJE POR TRANSPORTADOR.
(01/06/2005). Ver ilustración. Solicitante/s: ADVANCED NAVIGATION & POSITIONING CORPORATION. Inventor/es: WINNER, KARL, KUEHN, BENJAMIN, R.
Un método de determinar una posición de un avión que tiene un transpondor que transmite una señal de respuesta en respuesta a una señal de interrogación, incluyendo el método: recibir señales de respuesta en una pluralidad de antenas dispuestas como una red; estimar una posición del avión a partir de las señales de respuesta recibidas; determinar una fase diferencial de las señales de respuesta; y analizar la fase diferencial de las señales de respuesta para determinar si las respectivas señales de respuesta provienen de diferentes antenas en el avión.
PROCEDIMIENTO PARA LA DETECCION DE OBJETOS DE DESTINO Y PARA LA DETERMINACION DE SU DIRECCION PARA UN APARATO DE RADAR EN UN AUTOMOVIL.
(16/12/2003). Ver ilustración. Solicitante/s: SIEMENS AKTIENGESELLSCHAFT. Inventor/es: DIRFLER, REINER.
Procedimiento para la detección de objetos de destino y para la determinación de su dirección, distancia, velocidad y similares para un aparato de radar especialmente para la aplicación en automóviles con las siguientes etapas del procedimiento: - disposición de al menos tres instalaciones de emisión y de recepción (A, B, C, D, E) para rayos de radar, de tal manera que sus campos de rayos (a, b, c, d, e) forman la región de detección del aparato de radar , - activación y desactivación sucesivas de las al menos tres instalaciones de emisión y de recepción (a, B, C, D, E), de tal manera que se accionan al mismo tiempo al menos dos instalaciones de emisión y de recepción adyacentes, y - evaluación de las señales de eco de las instalaciones de emisión y de recepción (A, B, C, D, E) según el procedimiento de monoimpulsos.
SISTEMA DE RADAR DE APERTURA SINTETICA DE ALTA RESOLUCION.
(01/07/2003). Solicitante/s: DEUTSCHES ZENTRUM FUR LUFT- UND RAUMFAHRT E.V.. Inventor/es: RUNGE, HARTMUT.
Sistema de radar de apertura sintética con un cierto número de n sistemas de radar SAR sobre plataformas portadoras apoyadas en satélites o cuerpos voladores, que se mueven en una formación prevista, que están dispuestos a distancia prevista unos de otros y cuyas direcciones visuales de antena están orientadas sobre tierra sobre la misma zona iluminada mediante impulsos de microondas, en el cual los múltiples conjuntos de datos SAR obtenidos son combinados en concordancia de fase en un procesador de señales formando una imagen SAR con resolución geométrica aumentada, caracterizado porque las distancias entre las plataformas portadoras en la dirección de vuelo y los ángulos visuales de las antenas están ajustados de manera que son registradas diferentes zonas espectrales espaciales de la señal retrodispersada desde tierra con un determinado solape de los espectros de azimut o espectros Doppler.
SISTEMA Y METODO PARA LA DETECCION DE TRANSPONDEDORES.
(01/03/2003). Solicitante/s: RAYTHEON COMPANY. Inventor/es: O\'CONNOR, ROGER J., KNITTLE, ROBERT C.
SE PRESENTA Y UN SISTEMA DE DETECCION DE TRANSPONDEDOR PARA DETECTAR LA PRESENCIA EN UN AREA DE DETECCION DE UN VEHICULO SOBRE EL CUAL ESTA MONTADO EL TRANSPONDEDOR . DOS MATRICES DE ANTENA SE SITUAN SOBRE LOS LADOS OPUESTOS DEL AREA DE DETECCION , Y TIENEN SUS MIRAS DE ALINEAMIENTO (B) DIRIGIDAS HACIA EL AREA DE DETECCION. PARA CADA MATRIZ, SE MIDE UNA SEÑAL DE SUMA Y DE DIFERENCIA DE LA SEÑALES RECIBIDAS DESDE EL TRANSPONDEDOR. LA SEÑAL DEL CANAL DE SUMA SE UTILIZA PARA ESTABLECER CUANDO SE HA PRODUCIDO UNA TRANSMISION, Y LA SEÑAL DEL CANAL DE DIFERENCIA SE UTILIZA PARA AISLAR CUALQUIER TRANSPONDEDOR QUE ESTE EN EL AREA DE DETECCION.
PROCEDIMIENTO PARA LA DETERMINACION DE UNA POSICION Y SU UTILIZACION EN UN SISTEMA CELULAR ANALOGICO.
(16/05/2002) UN METODO Y APARATO PARA DETERMINAR LA LOCALIZACION DE UNA UNIDAD MOVIL EN UN SISTEMA CELULAR. UNA SEÑAL SINCRONIZADA EN UNA FASE COMUN SE GENERA EN CADA ESTACION BASE EN UN SISTEMA. LA UNIDAD MOVIL TRANSMITE UN TONO DE SEÑAL. CADA ESTACION BASE COMPARA LA FASE DEL TONO DE SEÑAL CON LA FASE COMUN DE LA SEÑAL SINCRONIZADA PARA PRODUCIR UN DESVIO DE FASE. UN CONTROLADOR DEL SISTEMA COMPARA LA DIFERENCIA ENTRE EL DESVIO DE FASE DE UNA PRIMERA ESTACION BASE Y EL DESVIO DE FASE DE UNA SEGUNDA ESTACION BASE Y DETERMINA LA DIFERENCIA DE DISTANCIA ENTRE LA PRIMERA ESTACION BASE Y LA UNIDAD MOVIL Y LA SEGUNDA ESTACION BASE Y LA UNIDAD MOVIL QUE DEFINE UNA CURVA…
DISPOSITIVO DE MEDICION DE POSICION Y PROCESO PARA DETERMINAR EL TIEMPO DE PROPAGACION DE ENERGIA RADIADA ENTRE UNA BASE FIJA Y UN OBJETO MOVIL.
(01/11/2000). Solicitante/s: RIENER, KARL STEFAN NIEDERNDORFER, FRIEDRICH, DIPL.-ING. LEITNER, RAINER, MAG. Inventor/es: RIENER, KARL STEFAN, NIEDERNDORFER, FRIEDRICH, LEITNER, RAINER.
LA INVENCION DESCRIBE UN PROCESO PARA LA DETERMINACION DEL TIEMPO DE DESARROLLO DE LA ENERGIA RADIADA ENTRE UNA BASE Y AL MENOS UN OBJETO MOVIL A UNA DISTANCIA. LA ENERGIA SE TRANSMITE A UNA FRECUENCIA PREDETERMINADA Y POSIBLEMENTE EN FORMA MODULADA AL MENOS POR MEDIO DE UNA SUPERFICIE ADYACENTE O RODEANDO LA BASE . UNA VEZ QUE LA ENERGIA RADIADA HA HECHO CONTACTO SOBRE EL OBJETO MOVIL, LA ENERGIA RETORNADA SE TRANSMITE CON UNA FRECUENCIA PREDETERMINADA Y POSIBLEMENTE EN FORMA MODULADA. LA LLEGADA DE LA INDICADA ENERGIA RETORNADA SE DETERMINA EN LA BASE Y SE CUENTA EL TIEMPO DE DESARROLLO ENTRE LA BASE Y AL MENOS UN OBJETO , ASI COMO SE TIENE EN CUENTA LA TRANSMISION Y/O LOS PROCESOS DE EXPLORACION.
CONJUNTO DE FORMACION DIGITAL DE HAZ.
(01/04/2000) UN SISTEMA DE ANTENAS DIGITALES FORMADORAS DE HACES A UTILIZAR EN SISTEMAS DE RADAR Y EN PARTICULAR EN SISTEMAS DE RADAR QUE UTILIZAN UNA TECNOLOGIA DE SISTEMA DE ANTENAS EXCITADAS EN FASE. EL SISTEMA DE ANTENAS RECIBE UNA SEÑAL DE ENTRADA EN UNA PLURALIDAD DE MODULOS DETECTORES, LOS CONVIERTE EN UNA FRECUENCIA INTERMEDIA Y A CONTINUACION CONVIERTE LAS SEÑALES DE FRECUENCIA INTERMEDIA EN SEÑALES DIGITALES DE N-BITS (PREFERENTEMENTE DE 1-BIT) A UNA VELOCIDAD DE SOBREMUESTREO, DONDE N ES UN VALOR MENOR QUE EL NUMERO DE BITS NECESARIOS PARA REPRESENTAR LA GAMA DINAMICA DE LA SEÑAL DE FRECUENCIA INTERMEDIA. A CONTINUACION…
RADAR DE REPRESENTACION TRIDIMENSIONAL.
(16/01/1998) UN SISTEMA Y UN METODO DE RADAR DE REPRESENTACION TRIDIMENSIONAL PARA GENERAR Y PROCESAR INFORMACION DE RADAR PARA PRODUCIR UNA IMAGEN TRIDIMENSIONAL DE LOS OBJETOS CAPTADOS POR EL SISTEMA. EL SISTEMA ESTA CREADO PARA CREAR IMAGENES TRIDIMENSIONALES DE OBJETOS FISICOS A UN ALCANCE RELATIVAMENTE CORTO, HASTA UNA DISTANCIA APROXIMADA DE 1000 PIES. EL SISTEMA COMPRENDE UN SISTEMA DE ANTENA SERVO CONTROLADA, EN EL QUE EL SISTEMA SERVO PROPORCIONA SEÑALES DE SALIDA INDICANDO EL ANGULO. DOS TRANSMISORES DE RADAR PROPORCIONAN SEÑALES DE RADAR, EN DOS BANDAS DE RADAR DIFERENTES, QUE SE TRANSMITEN SELECTIVAMENTE POR EL SISTEMA DE ANTENA COMO UN HAZ DE RADAR. UN RECEPTOR DE RADAR PRE-PROCESA LAS SEÑALES DE RETORNO DE RADAR REFLEJADAS POR LOS OBJETIVOS. SE…
DISPOSITIVO RADAR DE VIGILANCIA EN EL SUELO, EN ESPECIAL PARA AEROPUERTOS.
(01/12/1997). Solicitante/s: DASSAULT ELECTRONIQUE. Inventor/es: CHAZELLE, XAVIER, MAITRE, BERNARD, AUGU, BERTRAND.
EL DISPOSITIVO RADAR DE VIGILANCIA COMPRENDE COMBINADOS UNA ANTENA FIJA PARA SUMINISTRAR UNA EXPLORACION ELECTRONICA DEL ESPACIO EN DIRECCION HORIZONTAL, UNA FUENTE DE EMISION (GEN) Y MEDIOS DE EMISION/RECEPCION DE HIPERFRECUENCIA (HFA;HFB), CON UN CIRCULADOR , UNA VIA DE EMISION (VE), UNA VIA DE RECEPCION (VR) Y MEDIOS (DIR;29) PARA SUBDIVIDIR LA VIA DE RECEPCION EN UNA SEÑAL SUMA (VR1) Y AL MENOS UNA SEÑAL DIFERENCIA (VR2). UN PRIMER Y UN SEGUNDO ELEMENTOS RECEPTORES CON CAMBIO DE FRECUENCIA (REC1 Y REC2) RECIBEN RESPECTIVAMENTE LAS SEÑALES SUMA Y DIFERENCIA, Y SUMINISTRAN DATOS DE SALIDA DIGITALIZADOS. MEDIOS DE TRATAMIENTO QUE TRATAN LAS SEÑALES DIGITALES SUMINISTRADAS DE LOS SEGUNDOS ELEMENTOS RECEPTORES PRIMERO Y SEGUNDO (REC1 Y REC2), PARA LA DETECCION RADAR DE OBJETOS EN LA ZONA VIGILADA.
PROCEDIMIENTO PARA LA CORRECCION DEL ERROR DE MEDICION PROVOCADO A TRAVES DE LA DESVIACION DE TIEMPO DE CADENCIOMETRO EN UN SISTEMA RADAR SECUNDARIO.
(01/05/1997) SE DA A CONOCER UN PROCEDIMIENTO PARA LA CORRECCION DE MEDICION ORIGINADO A TRAVES DE LA DESVIACION DE TIEMPO DE CADENCIOMETROS EN LA LOCALIZACION DE AVIONES EN UN SISTEMA RADAR SECUNDARIO. PARA LA DETERMINACION DE UNA DESVIACION DE TIEMPO DEL CADENCIOMETRO DE DOS ESTACIONES (S1, S2;...S1, S4) SITUADAS EN EL SUELO, SE EJECUTA DE FORMA INMEDIATA EN UNA DISPOSICION, UNA DESPUES DE OTRA, DE DOS CICLOS DE PREGUNTA/RESPUESTA EN LAS DIRECCIONES CONTRAPUESTAS A TRAVES DEL MISMO TRAMO (D1 + D2) DE TRANSMISION: RECEPCION DE LA RESPUESTA DADA DE LA ESTACION BS DEL LIMITE DE UN AVION A TRAVES DE LA ESTACION S2 DEL SUELO. AVES…
DISPOSITIVO PARA IDENTIFICAR Y LOCALIZAR TRANSPONDEDORES.
(16/11/1996). Solicitante/s: BRITISH TECHNOLOGY GROUP LIMITED. Inventor/es: DE HAAN, FRANS HERMAN.
LA INVENCION SE REFIERE A UN RADAR DE VIGILANCIA SECUNDARIA (SSR) PARA USAR EN LOS AEROPUERTOS, SEGUN EL CUAL EL AEROPUERTO SE DIVIDE EN UN NUMERO CONSIDERABLE (PREFERENTEMENTE DE 100 A 250) DE REGIONES DE DIVISION, CADA UNA DE LAS REGIONES QUE TIENE AL MENOS UNO Y PREFERENTEMENTE AL MENOS DOS TRANSMISORES (1, 2 EN FIG. 1; 1, 3; 2, 4; 3, 5; 4, 6; EN FIG. 4) Y AL MENOS DOS RECEPTORES (1, 2, 3 EN FIG. 1; 1, 2, 3; 2, 3, 4; 3, 4, 5; 4, 5, 6 EN FIG. 4) PARA DETERMINAR LA LOCALIZACION DE UN TRANSPONDEDOR INTERROGADO MEDIANTE MULTILATERACION, SEGUN EL CUAL UN TRANSMISOR PUEDE TENER LA MISMA LOCALIZACION QUE UN RECEPTOR, Y LOS TRANSMISORES Y RECEPTORES ESTAN CONECTADOS A UN PROCESADOR CENTRAL.
METODO PARA LOCALIZAR UN EMISOR DE RADIOFRECUENCIA.
(01/04/1996). Solicitante/s: HUGHES AIRCRAFT COMPANY. Inventor/es: HUSS, RONALD E., FELDMANN, ELLIS S.
EL METODO SIRVE PARA LOCARLIZAR UN EMISOR DE RADIOFRECUENCIA QUE TRANSMITA PULSOS EN FORMA DE HAZ DE BARRIDO. EL METODO COMPRENDE LOS PASOS DE ALMACENAR LOS DATOS DE INTERVISIBILIDAD DE LOS PUNTOS DEL TERRENO EN UNA REGION ALREDEDOR DEL PUNTO DE OBSERVACION, MIDIENDO EN EL PUNTO DE OBSERVACION LAS VECES DE LLEGADA DE UNA PLURALIDAD DE REFLEXIONES DE PUNTO DE TERRENO DE UN PULSO SIMPLE TRANSMITIDO POR EL EMISOR , REPITIENDO EL PASO DE MEDIDA PARA UNA PLURALIDAD DE PUNTOS TRANSMITIDOS POR EL EMISOR Y COMPARANDO PUNTOS DE TERRENO DE REFLEXION CALCULADA A PARTIR DE LOS TIEMPOS MEDIDOS DE LLEGADA PARA LOS EMPLAZAMIENTOS DEL EMISOR CON LOS DATOS ALMACENADOS DE LOS PUNTOS DEL TERRENO.
INSTALACION DE SEÑALIZACION DE VIA LIBRE EN FERROCARRILES.
(16/07/1994). Solicitante/s: SIEMENS AKTIENGESELLSCHAFT. Inventor/es: VON PIEVERLING, KLAUS, DR.-ING., RITTER, GERHARD, DIPL.-ING.
SI SE UTILIZAN PARA LA SEÑALIZACION DE VIA LIBRE INSTALACIONES DE DETECCION DE LA LONGITUD DEL TREN BASADAS EN RADARES, SE PUEDEN PRODUCIR ERRORES. UTILIZANDO UN TRANSMISOR DE RADAR MODULAR CON UNA ANTENA PERPENDICULAR Y OTRA OBLICUA CON RELACION AL TREN SE PUEDEN ELIMINAR LAS SEÑALES REFLEJADAS POR OTROS VEHICULOS. LA ANTENA REGISTRA EL PRINCIPIO Y EL FINAL DEL TREN, MIENTRAS QUE LA ANTENA MIDE LA VELOCIDAD DEL TREN.
SISTEMA PARA LA AYUDA PARA EL ATERRIZAJE PARA AVIONES CON RADAR DE A BORDO.
(01/06/1994). Solicitante/s: DEUTSCHE AEROSPACE AG. Inventor/es: DRESCHER, ROLAND, DIPL.-ING., JEHLE, FRANZ, DIPL.-ING., OCH, GUNTHER, DR.
PARA EL SISTEMA DE AYUDA PARA EL ATERRIZAJE PARA UN AVION CON PROPIO RADAR DE A BORDO HAY DISPUESTOS COMO INSTALACIONES, UNIDAS POR EL FONDO, DOS RADARES - BALIZAS TRANSPORTABLES, QUE SE COLOCA COMO MARCADO AL PRINCIPIO Y AL FINAL DE UNA PISTA DISPUESTA PARA EL ATERRIZAJE, ESPECIALMENTE DE UNA PISTA AUSILIAR DE ATERRIZAJE. SOBRE LA SEÑAL DE CONSULTA DETERMINADA SEGUN LA FRECUENCIA Y/O CODIFICADO, DEL RADAR DE A BORDO DEL AVION SE PONE EN FUNCION SEÑALES DE CONSTESTACION DIFERENTES DE LA SEÑAL DE CONSULTA Y DETERMINADA EN LA BALIZA LA REDIACION DE SU PARTE SEGUN LA FRECUENCIA Y/O CODIFICADO. DE LAS SEÑALES DE CONTESTACION, RECIBIDAS DEL RADAR DE A BORDO, SE CALCULA Y SE INDICA LA POSICION RELATIVA DE LA PISTA DE ATERRIZAJE.
SISTEMA DE SEGUIMIENTO DEL BLANCO.
(01/11/1993). Solicitante/s: OERLIKON CONTRAVES AG. Inventor/es: PICCOLRUAZ, HEINZ.
UN SISTEMA DE SEGUIMIENTO DEL BLANCO CON GRAN SEGURIDAD DE SEGUIMIENTO Y MINIMA SERVOCARGA, COMPUESTO POR VARIOS GRUPOS (D1, D2, W1, W2, W3) DE SENSORES DE SEGUIMIENTO CON DIFERENTES TIEMPOS DE SEÑALES Y LAS CORRESPONDIENTES LINEAS DE MIRA DE GRUPO A GRUPO: - UN SERVO (S) QUE CONDUCE A ESTAS LINEAS DE MIRA AL BLANCO; - UN ESTIMADOR DEL BLANCO (ZE) QUE CALCULA EL MOVIMIENTO DEL BLANCO; - UN SERVO-ESTIMADOR (SE) QUE CALCULA EL MOVIMIENTO DEL SERVO (S) Y - UN REGULADOR (R) QUE DIRIGE AL SERVO (S) Y AL SERVO-ESTIMADOR (SE) A LA MISMA VEZ, PASANDO LA DIFERENCIA VECTORAL (EZ - ES) DE AMBOS CALCULOS MENCIONADOS (EZ Y ES) A CERO. LAS SEÑALES VECTORIALES (AI,I=1,2,3,) DE LOS GRUPOS SENSORES ANGULARES (WI) SE TRANSFORMAN EN UNA SEÑAL COMBINADA (MI=MAI.AI) CON LOS MULTIPLICADORES (MVI) CON LAS MATRICES (MAI), PASANDO AL SERVO (S) Y AL SERVO-ESTIMADOR (SE) DIRECTAMENTE, COMO SI UNICAMENTE EXISTIERA UN SENSOR ANGULAR CON LA SEÑAL COMBINADA (MI).
SISTEMA RADAR DE BUSQUEDA.
(16/04/1993). Solicitante/s: HOLLANDSE SIGNAALAPPARATEN B.V.. Inventor/es: GARSIDE, PETER FREDERICK.
SISTEMA RADAR DE BUSQUEDA PROVISTO DE UN DISPOSITIVO DE BUSQUEDA DOTADO DE UNA ANTENA PRIMARIA Y DE UN SEGUNDO DISPOSITIVO CON UNA ANTENA SSR/IFF . AMBOS DISPOSITIVOS SUMINISTRAN MENSAJES INDEPENDIENTEMENTE, Y LAS SEÑALES DERIVADAS DE ELLOS SE PUEDEN PRESENTAR AMBAS EN UNA PANTALLA DE VISUALIZACION. LAS ANTENAS SE ORIENTAN EN DIRECCIONES OPUESTAS PARA QUE LAS SEÑALES DERIVADAS DE LOS MENSAJES INDIVIDUALES PUEDAN SER PRESENTADAS INDEPENDIENTEMENTE. POR ESTE MOTIVO, LA CAPACIDAD DEL SISTEMA ES DOBLE EN COMPARACION CON UN SISTEMA RADAR CONVENCIONAL QUE SOLO TENGA UN DISPOSITIVO SECUNDARIO Y UNA ANTENA CONVENCIONALES.
PROCEDIMIENTO PARA REALZAR LOS RENDIMIENTOS EN LAS COSECHAS.
(01/07/1975). Solicitante/s: AMERICAN CYANAMID CO..
Resumen no disponible.
{kind=link}
{kind=link}