CIP-2021 : A61F 2/58 : Codos; Muñecas.
CIP-2021 › A › A61 › A61F › A61F 2/00 › A61F 2/58[3] › Codos; Muñecas.
Notas[t] desde A61 hasta A63: SALUD; SALVAMENTO; DIVERSIONES
Notas[g] desde A61F 2/00 hasta A61F 4/00: Filtros; Dispositivos implantables en los vasos sanguíneos; Prótesis; Accesorios
A NECESIDADES CORRIENTES DE LA VIDA.
A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE.
A61F FILTROS IMPLANTABLES EN LOS VASOS SANGUINEOS; PROTESIS; DISPOSITIVOS QUE MANTIENEN LA LUZ O QUE EVITAN EL COLAPSO DE ESTRUCTURAS TUBULARES, p. ej. STENTS; DISPOSITIVOS DE ORTOPEDIA, CURA O PARA LA CONTRACEPCION; FOMENTACION; TRATAMIENTO O PROTECCION DE OJOS Y OIDOS; VENDAJES, APOSITOS O COMPRESAS ABSORBENTES; BOTIQUINES DE PRIMEROS AUXILIOS (prótesis dentales A61C).
A61F 2/00 Filtros implantables en los vasos sanguíneos; Prótesis, es decir, elementos de sustitución o de reemplazo para partes del cuerpo; Dispositivos para unirlas al cuerpo; Dispositivos para proporcionar permeabilidad o para evitar que colapsen las estructuras tubulares del cuerpo, p. ej. stents (como artículos cosméticos, ver las subclases apropiadas, p. ej. pelucas o postizos, A41G 3/00, A41G 5/00, uñas artificiales A45D 31/00; prótesis dentales A61C 13/00; materiales para prótesis A61L 27/00; riñones artificiales A61M 1/14; corazones artificiales A61M 60/00).
A61F 2/58 · · · Codos; Muñecas.
CIP2021: Invenciones publicadas en esta sección.
(15/04/2020) Guante de exoesqueleto provisto al menos de un mecanismo de vinculación individual para cada dedo, en el que el mecanismo de vinculación comprende secciones que están interconectadas con articulaciones para permitir cambiar su orientación angular mutua, caracterizado porque el mecanismo de vinculación comprende una primera vinculación unida al guante , una segunda vinculación conectada a la primera vinculación por medio de una primera articulación , una tercera vinculación conectada a la segunda vinculación por medio de una segunda articulación , y una cuarta vinculación conectada al tercera vinculación por medio de una tercera articulación , en el que la cuarta vinculación está provista de un órtesis de dedo , y la…
(08/01/2019). Solicitante/s: AMOROS TORRO, Jorge. Inventor/es: MORALES VIDAL,Ricardo, AMOROS TORRO,Jorge.
Brazo articulado con estructura de cadena cinemática que imita un brazo humano, comprendiendo articulación de hombro , de codo y de muñeca , consecutivamente unidas por eslabones largos y cada una con eslabones cortos vinculados por uniones articuladas con amortiguadores rotativos y muelles que determinan movimientos cinemáticamente desacoplados consistentes en: la de hombro : aducción-abducción sobre un primer eje rotacional (A), flexión-extensión sobre un segundo eje rotacional (B) y rotación medial-lateral sobre un tercer eje rotacional (C); la del codo : flexión-extensión sobre un cuarto eje rotacional (D) y pronación-supinación sobre un quinto eje rotacional (E); y la de la muñeca : flexión-extensión sobre un sexto eje rotacional (F) y desviación ulnar-radial sobre un séptimo eje rotacional (G).
PDF original: ES-2695502_A1.pdf
PROCEDIMIENTO Y SISTEMA DE REHABILITACIÓN DE UNA EXTREMIDAD PARÉTICA.
(31/05/2018) Se proporcionan sistemas generadores para generar un decodificador neuromuscular-a-movimiento a partir de una extremidad sana. El sistema generador está configurado para recibir señales neuromusculares procedentes de sensores neuromusculares asociados con ubicaciones musculares/nerviosas predefinidas de al menos un par de músculos/nervios agonistas y antagonistas de la extremidad sana, obtenidas durante la realización por parte de la persona de un ejercicio predefinido (definido por datos de ejercicio predefinidos) con la extremidad sana; para recibir señales de movimiento procedentes de sensores de movimiento asociados a posiciones predefinidas de la extremidad sana, durante la realización por parte de la persona del…
MANIPULADOR ROBOTICO CONFIGURABLE ACCIONADO POR MEDIO DE ACTUADORES Y TENDONES.
(29/03/2018). Solicitante/s: UNIVERSIDAD NACIONAL AUTONOMA DE MEXICO. Inventor/es: ORTEGA CARRILLO,Hernando, GUTIÉRREZ PADRÓN,Adrián.
La presente invención está relacionada con una mano robótica con comportamiento ambidiestro que comprende por lo menos un actuador para proporcionar la fuerza necesaria para dar movimiento a por lo menos una extremidad o dedo que se encuentra sujeto a extremo superior de dicho actuador a través de un soporte móvil giratorio; y dicho actuador incluye en su extremo inferior una base que es la encargada de mantenerlo fijo a otras partes de la mano robótica, donde dicha base constituye el punto de referencia estático sobre el que cambia de posición el dedo a mover; y, un sistema de transmisión que permite transmitir la fuerza proporcionada por el actuador hacia el dedo para que éste pueda moverse.
Control de dispositivo de extremidad.
(03/01/2018) Unidad de control para controlar eléctricamente un dispositivo de extremidad eléctricamente controlable en forma de una extremidad artificial para un ser humano o una extremidad de robot, comprendiendo el dispositivo de extremidad una pluralidad de accionadores, comprendiendo la unidad de control una primera interfaz para conectar la unidad de control al dispositivo de extremidad, comprendiendo la unidad de control una segunda interfaz para conectar la unidad de control a un dispositivo de recopilación de datos que comprende uno o más dispositivos de detección, comprendiendo la unidad de control una unidad de procesamiento que está dispuesta para controlar el dispositivo de extremidad basándose al menos en datos recopilados por…
Dispositivo sensitivo de presión aplicable a prótesis mioeléctricas de miembro superior.
(14/07/2017) 1. Dispositivo sensitivo de presión aplicable a prótesis mioeléctricas de miembro superior: comprendiendo dicha prótesis una mano electromecánica provista de unos dedos funcionales que realizan movimientos de apertura y cierre de la mano en función de unas señales mioeléctricas producidas por unos movimientos musculares del usuario; caracterizado porque comprende:
- al menos un sensor de fuerza resistivo montado en uno de los dedos funcionales de la mano electromecánica , y conectado a una unidad procesadora ;
- una unidad procesadora que procesa la señal recibida por el sensor de fuerza y proporciona una corriente de alimentación variable a un motor…
(12/07/2017). Solicitante/s: CENTRO ORTOPEDICO TECNOLOGICO S.L.U. Inventor/es: ROCA VIVES,Manel.
1. Prótesis mioeléctrica; que comprende: una mano electromecánica ; una unidad de giro de la muñeca, y una fuente de alimentación ; caracterizada porque comprende cuatro electrodos de entrada, dispuestos en la prótesis de forma adecuada para la captación por cada uno de ellos de un impulso mioeléctrico independiente de un paciente o usuario; encontrándose conectados dos primeros electrodos , encargados de la apertura y cierre de la mano a un procesador de la mano electromecánica ; y dos segundos electrodos , encargados del movimiento de giro de muñeca, un procesador de la unidad de giro de la muñeca.
PDF original: ES-1187509_U.pdf
Control coordinado para una prótesis de brazo.
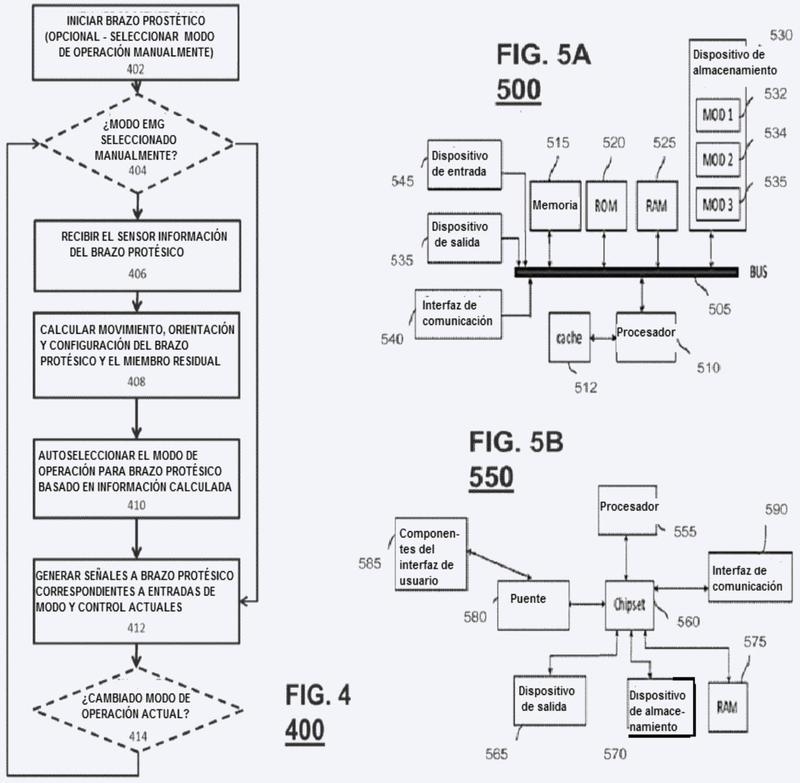
(09/03/2016). Ver ilustración. Solicitante/s: VANDERBILT UNIVERSITY. Inventor/es: GOLDFARB,Michael, ALSHAMMARY,NASSER, BENNETT,DANIEL, DALLEY,SKYLER.
Método para el control de una prótesis de brazo que tiene al menos una articulación accionada y al menos un sensor de medición de inercia (IMS) , caracterizado porque el método comprende:
determinar un movimiento de la prótesis de brazo con relación al marco de referencia inercial basado al menos en una salida del IMS;
generar señales de control para la al menos una articulación accionada basándose en el movimiento y la orientación del brazo protésico.
PDF original: ES-2642123_T3.pdf
Mejoras en o relacionadas con las prótesis y las órtesis.
(07/03/2016) Una prótesis o una órtesis que comprende:
un componente móvil ;
un motor eléctrico accionable para mover el componente , en el que el motor tiene al menos una entrada de corriente y/o tensión, la aplicación de la cual al motor resulta en que el componente tiene al menos una condición de funcionamiento;
un circuito de medición de la corriente que mide la corriente consumida por el motor , y/o un circuito de medición de la tensión que mide la caída de tensión en el motor; y
un dispositivo electrónico que controla el movimiento del componente móvil y almacena los valores de corriente y/o tensión predeterminados para el motor y una o más salidas resultantes de condiciones…
Prótesis de mano multifuncional y autónoma.
(24/02/2016) Una prótesis de mano articulada que tiene un metacarpo que se extiende sustancialmente a lo largo de un plano metacarpiano (M-M) y al menos un dedo pulgar que tiene una falange proximal conectada de manera rotativa al metacarpo y un dedo índice que tiene una falange proximal conectada de manera rotativa al metacarpo , que comprende:
- medios de flexión del dedo índice adecuados para hacer que el dedo índice rote alrededor de un eje de flexión sustancialmente paralelo al plano metacarpiano (M-M);
- medios de aducción del dedo pulgar adecuados para hacer que el dedo pulgar rote alrededor de un eje de aducción sustancialmente paralelo al plano metacarpiano (M-M) e inclinado con respecto al eje de flexión del dedo índice;
- un motor eléctrico integrado en la prótesis ;
…
Una prótesis o una ortosis y un método para controlar una prótesis o una ortosis.
(16/02/2016) Una prótesis o una ortosis que comprende:
una pluralidad de componentes móviles pudiendo cada componente ser movido por un respectivo motor ; y
un dispositivo de control que controla el movimiento de los componentes móviles y almacena valores de corriente predeterminados para los respectivos motores , caracterizada por que la prótesis o la ortosis comprende además un circuito de medida de corriente que mide la corriente obtenida por los respectivos motores ,
en la que el dispositivo de control compara la corriente medida por el circuito de medida de corriente con el valor de corriente predeterminado almacenado por un primer motor de manera que se determina cuándo el movimiento de al menos un primer componente movible…
Aparato protésico y método de control.
(08/07/2015) Aparato protésico para un usuario, el aparato comprende:
una prótesis de miembro superior que comprende por lo menos un dígito que funciona mecánicamente ;
por lo menos un sensor configurado para estar dispuesto en el usuario, el por lo menos un sensor está operativo para sentir un recorrido descrito por el sensor durante el movimiento del mismo por parte del usuario y proporcionar una salida de recorrido sentido que depende del recorrido; y
un procesador operativo para permitir el accionamiento del por lo menos un dígito ,
caracterizado por que el procesador está operativo para permitir el accionamiento del por lo menos un dígito ,
dependiendo de la salida de recorrido sentido que tiene una característica predeterminada y de tal…
Prótesis modular de mano humana con módulos de dedo mecánicamente independientes, modulares.
(01/07/2015) Prótesis modular de mano humana con módulos de dedo mecánicamente independientes, modulares que tiene al menos un módulo de dedo mecánicamente independiente que consiste particularmente en una base de dedo fija, un segmento proximal de dedo, un segmento distal de dedo, un vástago y un accionamiento de rotación, caracterizada porque la base de dedo, equipada con una junta proximal de rotación de vástago y una junta de rotación de un segmento proximal de dedo, se conecta mediante una junta proximal de vástago, el vástago , un segmento distal de vástago y simultáneamente mediante la junta proximal del segmento proximal de dedo, el segmento proximal de dedo, una junta distal del segmento proximal de dedo con el segmento distal de dedo, en la que la junta distal del segmento…
(13/05/2015) Una prótesis de mano que comprende:
un chasis de la mano;
un elemento de pulgar montado en el chasis de la mano para giro del elemento de pulgar con respecto al chasis de la mano alrededor de un eje que se extiende generalmente a lo largo de la longitud del elemento de pulgar; y
un motor situado en uno de los elementos de entre el chasis de la mano y el elemento de pulgar;
caracterizado por que el motor es operable para impulsar a un tornillo sin fin , y por que la prótesis comprende además una rueda dentada del tornillo sin fin situada en el otro elementos de entre el chasis de la mano y el elemento de pulgar, estando el tornillo sin fin engranado con la rueda dentada del tornillo sin fin de tal manera que, cuando se produce el accionamiento del motor, el elemento de pulgar gira con respecto al chasis de la mano.
Método de controlar una prótesis.
(11/02/2015) Un método de controlar un componente móvil de una prótesis u ortosis , comprendiendo el método:
mover el componente por medio de un motor ;
caracterizado por que el método comprende los pasos adicionales de:
por medio de un aparato eléctrico:
determinar en qué momento se frena el movimiento del componente cuando este componente se apoya contra una superficie; y
proporcionar una pluralidad de impulsos eléctricos de accionamiento al motor en dependencia de la determinación y del momento en el que se frena el movimiento del componente para accionar así el motor a fin de hacer que el componente se apoye contra la superficie con mayor fuerza.
(11/12/2013) Una mano artificial adecuada para aplicaciones robóticas como prótesis, que comprende un armazón con un pulgar y al menos dos dedos , y tiene una transmisión por motor con respecto al armazón para ajustar el pulgar y los dedos con respecto al armazón , en el que la transmisión por motor tiene un cárter y un eje posicionado de forma rotatoria sin cárter , y en el que los dedos están conectados al eje , caracterizada porque el cárter está montado en un primer rodamiento (9') soportado por el armazón para permitir que el cárter pueda girar con respecto al armazón y porque el pulgar está conectado al cárter.
(01/07/2013) Cubierta para una mano protésica que comprende:
una primera capa en forma de un guante o manopla configurada para cubrir una mano protésica,comprendiendo la primera capa un elastómero; y
una segunda capa dispuesta sobre al menos parte de una superficie de la primera capa , siendo unitaria lasegunda capa ,
caracterizada porque la segunda capa comprende poliuretano.
Revestimiento de prótesis.
(09/05/2012) Un revestimiento de prótesis que comprende:
una capa externa que tiene una superficie exterior que define una superficie más externa de unaprótesis cuando el revestimiento de prótesis está en uso sobre la prótesis; y
una capa interna que tiene una superficie interior que yace junto a la prótesis cuando elrevestimiento de prótesis está en uso sobre la prótesis,
caracterizado porque las capas externa e interna tienen en general una misma forma y lacapa externa define un espacio en donde la capa interna es recibida de manera tal que unasuperficie dirigida hacia dentro de la capa externa yace junto a una superficie dirigida hacia fuera de la capa interna ; y
la…
Mano robótica con dedos similares a los humanos.
(14/03/2012) Una mano robótica , que comprende:
al menos un conjunto de dedos ; y para cada uno de los conjuntos de dedos incluidos en la mano robótica, un conjunto de accionamiento que aplica selectivamente tensión a cuatro elementos tensión alargados y flexibles (c1, c2, c3, c4); en la que el al menos un conjuntos de dedos comprende un conjunto de enlaces (l1, l2, l3) accionados por los elementos de tensión (c1, c2, c3, c4); en la que los enlaces (l1, l2, l3) están interconectados con articulaciones de pivote; y en la que el conjunto de dedos comprende además un conjunto de poleas (p1, p2, p3, p4) soportadas en los enlaces (l1, l2, l3) para apoyar y guiar a los elementos de tensión (c1, c2, c3, c4) en el conjunto…
(01/08/2006) Prótesis de dedo para su adaptación a un muñón de hueso tubular de un dedo, que presenta un implante de forma de vástago que puede implantarse y fijarse en el hueso tubular y con el cual se puede acoplar un cuerpo sustitutivo extracorporal , caracterizada porque - el implante de forma de vástago es hueco y está prevista en su cabeza hasta el vástago hueco una perforación configurada en su arranque como un casquillo de apriete cónico, estando previsto también un taladro roscado en el extremo inferior del vástago, - está previsto un casquillo roscado que presenta en su extremo de base una rosca que puede atornillarse con el taladro roscado del extremo inferior del vástago, con…
PROTESIS DE MIEMBRO SUPERIOR.
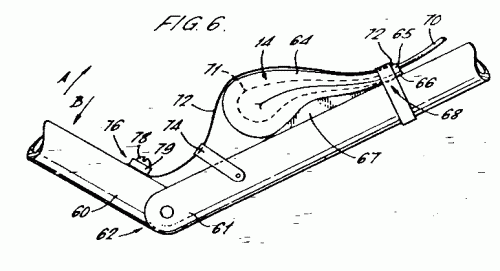
(01/05/2004) Prótesis articular endoesquelética que proporciona a un usuario al menos uno de los miembros del grupo que consta de una articulación pivotante de la muñeca que es susceptible de ser accionada mecánicamente, una articulación pivotante del codo que es susceptible de ser accionada mecánicamente y una articulación pivotante del hombro que es susceptible de ser accionada mecánicamente, teniendo dicha prótesis al menos un elemento que constituye un miembro superior y está realizado en forma de tubo endoesquelético alargado con una parte que constituye el extremo proximal y tiene una conexión pivotante a un cuerpo de soporte para la misma, teniendo uno de los miembros…
(01/04/1999) LA INVENCION SE REFIERE A UN PROCEDIMIENTO PARA LA APLICACION DE UN MOMENTO DE GIRO SOBRE EL EJE DEL CODO DE UNA PROTESIS DE BRAZO SUPERIOR PARA LA OSCILACION DEL BRAZO INFERIOR CON LA AYUDA DE UNA FUERZA ELASTICA, ASI COMO DE UN ELEVADOR DE CODO. EL ELEVADOR DE CODO POSEE UNA PIEZA DE ADAPTACION AL BRAZO SUPERIOR, QUE ESTA UNIDA A TRAVES AL MENOS DE UN EJE DE CODO ARTICULADO CON UNA PIEZA DE ADAPTACION AL BRAZO INFERIOR, CUYA OSCILACION SE APOYA POR MEDIO DE UN ELEMENTO ELASTICO. EL ELEMENTO ELASTICO ESTA IMPULSADO POR UNA FUERZA DE TRACCION DE FORMA DIRECTA O INDIRECTA A PARTIR DE LA ENTRADA DE UN ENGRANAJE , CUYA SALIDA ENGRANA EN UN EXTREMO INTERNO DE UN ORGANO DE TRACCION, CUYO EXTREMO EXTERIOR ES SUJETABLE EN UN PUNTO FIJO DE LA PIEZA DE ADAPTACION AL BRAZO SUPERIOR QUE DEFINE CON EL EJE DE CODO UNA PALANCA…
(16/11/1998). Solicitante/s: ROYAL INFIRMARY OF EDINBURGH NHS TRUST. Inventor/es: GOW, DAVID, JAMES.
UNA PROTESIS QUE PROPORCIONA AL MENOS UN ELEMENTO DE DEDO ACCIONABLE MECANICAMENTE, QUE SE EXTIENDE POR LO GENERAL TANGENCIALMENTE CON RELACION A UNA RUEDA CON TORNILLO SINFIN EN EL CUERPO DE SOPORTE DE LA PROTESIS , Y CON MONTAJE GIRATORIO ALREDEDOR DEL HUSILLO DE LA RUEDA CON TORNILLO SINFIN . EL ELEMENTO DE DEDO ESTA ACCIONADO POR UN MOTOR DE MANDO CON UN HUSILLO QUE SE EXTIENDE LONGITUDINALMENTE Y ESTA CONECTADO CON EL ENGRANAJE DE LA RUEDA CON TORNILLO SINFIN . DURANTE EL USO DE LA PROTESIS , EL ELEMENTO DE DEDO SE MUEVE EN TORNO A LA RUEDA CON TORNILLO SINFIN APROXIMANDOSE O ALEJANDOSE A OTRO ELEMENTO DE DEDO O A UN DEDO NATURAL PARA CERRAR O ABRIR LA MANO CUANDO SE ACCIONA EL MOTOR.
ARTICULACION EN PROTESIS ORTOPEDICAS.
(01/04/1998). Solicitante/s: OTTO BOCK ORTHOPADISCHE INDUSTRIE BESITZ- UND VERWALTUNGS-KOMMANDITGESELLSCHAFT. Inventor/es: KRIEGER, WILFRIED, DIPL.-ING.
LA INVENCION SE REFIERE A UNA ARTICULACION O UNION GIRATORIA EN PROTESIS ORTOPEDICAS, CON UNA PARTE SUPERIOR DE LA ARTICULACION , CON UNA PARTE INFERIOR DE LA ARTICULACION Y EN CASO NECESARIO, CON BIELAS UNIDAS INTERMEDIAS (DESIGNADAS EN LO SUCESIVO DE MODO RESUMIDO COMO "ELEMENTOS DE ARTICULACION"), ASI COMO CON UN ELEMENTO DE CONTROL , EL CUAL ACTUA POR LOS DOS LADOS POR MEDIO DE UN PUNTO DE ACOPLAMIENTO SEPARADO DE UN EJE DE ARTICULACION EN UN MIEMBRO DE ARTICULACION CADA VEZ (DESIGNADOS EN LO SUCESIVO DE MODO RESUMIDO COMO "MIEMBROS ARTICULADOS DE ACOPLAMIENTO"). PARA LA MEJORA SE PROPONE DE ACUERDO CON LA INVENCION, QUE POR LO MENOS UNO DE LOS CITADOS PUNTOS DE ACOPLAMIENTO ESTE DISPUESTO EN COMPARACION DE SU MIEMBRO ARTICULADO DE ACOPLAMIENTO VARIABLE EN POSICION Y ESTE UNIDO CINEMATICAMENTE POR MEDIO DE UN ACOPLAMIENTO MECANICO FORZADO CON AL MENOS OTRO MIEMBRO ARTICULADO.
(16/03/1996). Solicitante/s: OTTO BOCK ORTHOPADISCHE INDUSTRIE BESITZ- UND VERWALTUNGS-KG. Inventor/es: GLABISZEWSKI, RICHARD.
LA INVENCION SE REFIERE A UN CODO ARTIFICIAL PARA UN MUÑON DE BRAZO SUPERIOR DISPONIENDO DE UNA CAPERUZA DE CODO UNIDA MEDIANTE EJE ARTICULADO A UN BRAZO DELANTERO DISEÑADO COMO UNA PIEZA DE PLASTICO HUECO. LA CAPERUZA DE CODO PUEDE ESTAR BLOQUEADA EN VARIAS POSICIONES CURVADAS MEDIANTE UN MECANISMO DE ENGANCHE. EL ENLACE PROXIMO AL EJE DEL BRAZO SUPERIOR SE ESTABLECE MEDIANTE UN ANILLO FUNDIDO Y UNA ARTICULACION DEL BRAZO SUPERIOR PERMITE AL BRAZO DELANTERO UN MOVIMIENTO DE BASCULACION AJUSTABLE. PARA PERMITIR QUE EL CODO PUEDA SER USADO CON MUÑONES DEL BRAZO SUPERIOR EN TODAS LONGITUDES, LA ARTICULACION DE ESTE BRAZO ESTA DISEÑADA COMO UN SOPORTE DE ANILLO Y EL MECANISMO DE ENGANCHE ES UN ENGANCHE DE TRACCION LOCALIZADO FUERA DE LA CAPERUZA DEL CODO E INTEGRADO EN UNA JUNTA ROTATIVA QUE FORMA UNA SECCION DEL EJE ARTICULADO.
UNA ARTICULACION MOTORIZADA EN UNA ESTRUCTURA DE ESQUELETO.
(16/07/1989). Ver ilustración. Solicitante/s: HENNEQUIN, JAMES RICHARD FLUCK, HENNEQUIN.
UNA ARTICULACION MOTORIZADA EN UNA ESTRUCTURA DE ESQUELETO, QUE COMPRENDE UN PAR DE MIEMBROS MOVILES CON RELACION A OTRO EN TORNO A UNA ARTICULACION , UNA MANGUERA INFLABLE QUE TIENE UNA PARED INEXTENSIBLE Y SE INFLA TRANSMITIENDO SU FUERZA DE EXPANSION A LA ARTICULACION, UNA TIRA U OTRO MEDIO PARA CONECTAR LA MANGUERA CON LOS MIEMBROS DE MODO QUE, EN UNA POSICION DE MOVIMIENTO RELATIVO DE LOS MIEMBROS, LA MANGUERA ESTE DESINFLADA, PLANA Y PLEGADA, Y UN ELEMENTO PARA INFLAR LA MANGUERA HACIENDO QUE AUMENTE SU SECCION TRANSVERSAL Y SE DESPLIEGUE PROVOCANDO MOVIMIENTO RELATIVO ENTRE LOS MIEMBROS. LA ARTICULACION PUEDE ESTAR RECUBIERTA DE CARNE ARTIFICIAL, CREANDO ASI, JUNTO CON LA EXPANSION DE LA MANGUERA INFLABLE , LA APARIENCIA REALISTA DE UN MUSCULO EN FLEXION. EL INVENTO ES APLICABLE A PROTESIS QUIRURGICAS, MODELOS ANIMADOS Y ROBOTICA.
{kind=link}
{kind=link}