CIP-2021 : B25J 9/06 : caracterizados por brazos de articulaciones múltiples.
CIP-2021 › B › B25 › B25J › B25J 9/00 › B25J 9/06[1] › caracterizados por brazos de articulaciones múltiples.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 9/00 Manipuladores de control programado.
B25J 9/06 · caracterizados por brazos de articulaciones múltiples.
CIP2021: Invenciones publicadas en esta sección.
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL.
(02/07/2020). Solicitante/s: MI ROBOTIC SOLUTIONS S.A. Inventor/es: SALAMANCA POBLETE,Hugo, BAEZA RAMIREZ,Luis.
Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica de revestimientos de molinos para la molienda de minerales en procesos de conminución, cuya configuración y operación permita mejorar la tarea de manipulación al poseer un mayor grado de libertad y/o flexibilidad en sus movimientos, proporcionando al procedimiento un mayor grado de certeza y eficacia, por lo tanto optimizando el tiempo de detención del molino por mantenimiento, así como evitar los riesgos a los que se pueda ver sometido el personal de mantenimiento, el sistema comprende al menos una estructura de soporte, al menos un sistema de alimentación y desplazamiento de revestimientos, al menos un sistema manipulador robótico de los revestimientos, al menos una herramienta de manipulación de revestimientos, al menos un sistema de visión artificial y al menos un sistema de control.
Robot de brazo manipulador subacuático.
(24/06/2020). Solicitante/s: Eelume AS. Inventor/es: PETTERSEN,KRISTIN Y, LILJEBÄCK,PÅL, SØRENSEN,ASGEIR J, STAVDAHL,ØYVIND, LUND,FREDRIK, TRANSETH,AKSEL A, GRAVDAHL,JAN TOMMY.
Un robot serpiente subacuático que comprende:
una pluralidad de enlaces que están conectados entre sí mediante módulos de articulaciones para generar un movimiento de flexión del robot, en donde los módulos de articulaciones accionan activamente el movimiento de los enlaces entre sí y son activados por uno o más actuadores y el robot se flexiona en dos o más articulaciones para generar un movimiento ondulante;
múltiples dispositivos de empuje ubicados en diferentes puntos a lo largo de la longitud del robot para aplicar empuje al robot para propulsión subacuática y opcionalmente como guía; y
al menos una herramienta , o al menos un punto de conexión para una herramienta, unida al robot;
en donde el movimiento de flexión y/o los dispositivos de empuje permiten el movimiento del robot y el control de la orientación y/o ubicación de la herramienta con algunos o todos los enlaces del robot que actúan como enlaces de un brazo manipulador.
PDF original: ES-2811977_T3.pdf
BRAZO ROBOTICO SERVIDOR DE PRODUCTOS PARA LA RESTAURACION.
(18/06/2020) 1. Brazo robótico servidor de producto para la restauración, constituido a partir de un brazo robótico con las características propias de un robot industrial , reprogramable, capaz de mover materias, piezas, herramientas o dispositivos especiales según trayectorias variables programadas y un, dispositivo electrónico , generalmente mecánico que desempeña tareas mecánicamente siendo sus movimientos naturales el de interpolación por articulación , tanto rotacional como angular. Contienen en su interior un microprocesador que regula cada uno de los movimientos del manipulador , dispositivo mecánico articulador mediante eslabones…
Brazo articulado por secciones oblicuas.
(14/12/2018). Solicitante/s: FERRÍN POZUELO, Rafael. Inventor/es: FERRÍN POZUELO,Rafael.
Brazo articulado por secciones oblicuas.
El brazo articulado objeto de la invención comprende una sucesión de primeros codos y segundos codos situados de forma alterna y conectados entre sí, que comprenden un hueco pasante , donde los primeros codos comprenden un cuerpo cilíndrico, con una cara transversal perpendicular a la generatriz del cuerpo cilíndrico, y una cara oblicua que forma un ángulo de desalineación con respecto a la cara transversal ; y los segundos codos comprenden un cuerpo cilíndrico, con una cara transversal perpendicular a la generatriz del cuerpo cilíndrico, y una cara oblicua que forma un ángulo de desalineación con respecto a la cara transversal ; tal que el brazo comprende articulaciones oblicuas formadas por caras oblicuas de un primer codo y un segundo codo , y articulaciones transversales formadas por caras transversales de un primer codo y un segundo codo.
PDF original: ES-2693923_A1.pdf
Instrumentos quirúrgicos articulados y métodos para desplegar los mismos.
(11/04/2018). Solicitante/s: Medrobotics Corporation. Inventor/es: FLAHERTY, J., CHRISTOPHER, OYOLA,ARNOLD, CASTRO,MICHAEL SALVATORE.
Una herramienta quirúrgica que comprende:
un primer conjunto alargado que comprende una región de articulación ; y
un segundo conjunto alargado que comprende:
un elemento de soporte alargado ;
un elemento de activación alargado móvil con respecto al elemento de soporte; y
un mecanismo funcional acoplado al elemento de activación, siendo un movimiento del mecanismo funcional en respuesta a un movimiento del elemento de activación, donde una fuerza impartida por el movimiento del elemento de activación se aísla del primer conjunto por el elemento de soporte, caracterizado por que el segundo conjunto comprende, además, una horquilla acoplada al elemento de soporte y donde la herramienta quirúrgica comprende, además, una holgura longitudinal entre la horquilla y un extremo distal del primer conjunto, donde el segundo conjunto está en comunicación con el primer conjunto de manera que el elemento de soporte pueda moverse con respecto al primer conjunto.
PDF original: ES-2668307_T3.pdf
Dispositivo de sonda articulado extensible.
(06/12/2017) Un dispositivo de sonda articulado que comprende:
un primer mecanismo que comprende:
un primer miembro de articulación posicionado en una zona proximal del primer mecanismo , una pluralidad de miembros de articulación intermedios , en donde uno primero de los miembros de articulación intermedios está acoplado de manera movible al primer miembro de articulación , un segundo miembro de articulación posicionado en una zona distal del primer mecanismo el cual está acoplado de manera movible a uno segundo de los miembros de articulación intermedios , y
un orificio pasante posicionado excéntricamente a través del cual está dispuesto un cable de actuación, en el que un primer extremo del cable de actuación está configurado para ser terminado sobre un componente de actuación…
ROBOT INDUSTRIAL MULTI-EJES.
(07/08/2017). Solicitante/s: ORTEGA MUÑOZ, David. Inventor/es: ORTEGA MUÑOZ,DAVID.
Robot industrial multi-ejes que comprende una cadena de elementos unidos entre sí por medio de unas articulaciones móviles accionadas y movidas por al menos un dispositivo de control, la cadena de elementos se extiende desde una estructura base hasta una herramienta requerida en una estación de trabajo, donde, la cadena de elementos comprende un segmento de brazo posicionador que incluye a la estructura base, y al menos un segmento de brazo manipulador que incluye en su extremo libre a la herramienta, el segmento de brazo posicionador aproxima al segmento de brazo manipulador a la estación de trabajo.
PDF original: ES-2629037_A1.pdf
PDF original: ES-2629037_B1.pdf
HERRAMIENTA, SISTEMA Y PROCEDIMIENTO AUTOMATIZADO DE TOMA DE MUESTRAS.
(09/02/2017). Solicitante/s: VERA CAMPOS, Claudio. Inventor/es: VERA CAMPOS,Claudio, BERBAKOW CASALI,Ottavio, ANINAT DE LA MAZA,Rodrigo, JANS VASQUEZ,Carlos Fernando.
Un herramienta o aparato de muestreo automatizada para concentrados de mineral que comprende al menos un plato maestro de cambio automático; al menos un plato esclavo de cambio automático; al menos una placa de montaje conjunto tubular de muestreo; un conjunto tubular, soldado o adosado mecánicamente al plato esclavo; al menos un cabezal de muestreo desmontable, con freno para émbolo; y al menos un émbolo reforzado con ajuste deslizante más un dispositivo de amortiguación ubicado en el interior del cuerpo tubular. La invención comprende además el sistema y el procedimiento asociado.
SISTEMA Y MÉTODO PARA EL RECUBRIMIENTO CON ELASTÓMEROS Y FLUOROPOLÍMEROS DE PIEZAS Y SOPORTES METÁLICOS.
(22/02/2013) Sistema para el recubrimiento con elastómeros y fluoropolímeros de piezas y soportes metálicos de uso en aplicaciones alimentario que comprende una cabina de pintado y un robot industrial con una pluralidad de herramientas de pintado que se caracteriza porque comprende una mesa de apilado de las piezas a recubrir, en donde se forman pilas de similares dimensiones; y en donde las piezas de la pila son parametrizadas de acuerdo a sus características esenciales, ancho, largo, altura de cada pieza, velocidad de desplazamiento del cabezal de recubrimiento, tipología de la pieza, y número de piezas, en una unidad de parametrización que transmite una matriz con los datos parametrizados a los medios de control del robot…
SISTEMA ROBOTICO CON CAPACIDAD TODOTERRENO Y BRAZO MANIPULADOR MULTIPLE, Y ELEMENTOS DE CONTROL Y SENSORIALES SEPARABLES Y AL MISMO TIEMPO FUNCIONALES.
(17/08/2011) Sistema robótico con capacidad todoterreno y brazo manipulador múltiple, y elementos de control y sensoriales separables y al mismo tiempo funcionales. El sistema consta de una plataforma móvil con tracción por medio de orugas, un sistema de control a bordo, un conjunto de sensores que obtienen información tanto del entorno como de la actitud del sistema robótico en su conjunto y un brazo manipulador múltiple. Este brazo permite al sistema manipular con destreza cargas de interés, como elementos peligrosos o víctimas de desastre. Gracias a que el sistema de control y el sistema sensorial son separables del sistema robótico pero mantienen su funcionalidad y comunican sus consignas y la información del entorno mediante enlaces por radio, la carga de pago del sistema…
MÓDULO PARA LA FABRICACIÓN DE ESTRUCTURAS MÓVILES AUTOMATIZADAS Y A UNA ESTRUCTURA MODULAR MÓVIL.
(03/05/2011) Un módulo para la fabricación de estructuras móviles automatizadas que comprende un primer elemento sustancialmente con forma de placa y un segundo elemento sustancialmente con forma de placa que están encarados entre sí y están mutuamente articulados de forma que pueden oscilar mediante la interposición de medios bisagra y medios para activar la oscilación relativa de dichos primer y segundo elementos sustancialmente con forma de placa dichos medios bisagra comprendiendo una bisagra cilíndrica que está provista entre dicho primer elemento sustancialmente con forma de placa y dicho segundo elemento sustancialmente con forma de placa y define un único eje (A) para su oscilación relativa de forma que dicho eje de oscilación (A) esté sustancialmente paralelo…
DISPOSITIVO AUTOMATICO MEJORADO PARA CORTAR MASAS PANIFICABLES.
(31/01/2011) Dispositivo automático mejorado para cortar masas panificables.Comprende principalmente unos medios de posicionamiento de un cabezal de corte con como mínimo cuatro grados de libertad, unos medios de corte superficial dispuestos en la parte frontal del cabezal de los medios de posicionamiento, unos medios de anclaje de los medios de posicionamiento y medios de corte a un elemento resistente, unos medios de captación de la disposición de las porciones de masas en el soporte de trabajo, y unos medios de control conectado a los medios de captación que transforman la señal captada por los medios de captación e identifican automáticamente unos parámetros de salida (tales como…
NUEVOS DERIVADOS DE PIPERIDINA COMO MODULADORES DEL RECEPTOR CCR5 DE LA QUIMIOQUINA.
(16/05/2007) Un compuesto de fórmula (I): (Ver fórmula) en la que A está ausente o es (CH2)2; R1 es heterociclilo, en el que el grupo heterociclilo se selecciona de pirano, piperidina, piperazina, pirrolidina o azetidina, y R1 está opcionalmente mono-sustituido con alquilo C C1-6, cicloalquilo C3_7, fenilo {opcionalmente sustituido con halo, alquilo C1-4, alcoxi C1, 4, CF3 u OCF3}, S(O)2(alquilo C1_4), S(O)2(fluoroalquilo C1_4), S(O)2fenilo {opcionalmente sustituido con halo, ciano, alquilo C1, 4, alcoxi C1-4, CF3, OCF3, S (O)2(alquilo C1-4) o S(O)2(fluoroalquilo C1-4)}, bencilo {opcionalmente sustituido con halo, alquilo C1-4, alcoxi C1-4, CF3 u OCF3}, C(O)H, C(O)(alquilo C1-4), benzoilo {opcionalmente sustituido con halo, alquilo C1-4, alcoxi C1-4, CF3 u OCF3}, C(O)2(alquilo C1, 4), C(O)NH2, C(O)NH(alquilo C1-4) o C(O)NHfenilo {opcionalmente sustituido con…
ESTRUCTURA DE BRAZO PARA ROBOTS DE TRABAJO DE TIPO HUMANO.
(16/09/2004) Una estructura de brazo para un robot antropomórfico que comprende un montaje de articulación de hombro que tiene una primera articulación acoplada a un torso para girar solamente alrededor de un primer eje , una segunda articulación acoplada a la primera articulación para girar solamente alrededor de un segundo eje , transversal al primer eje, y una tercera articulación acoplada a la segunda articulación para girar solamente alrededor de un tercer eje , transversal al segundo eje, intersectando los ejes, primero a tercero, en un punto único, y un montaje de articulación de codo acoplado a la tercera articulación del montaje de articulación de hombro, caracterizada porque la posición y postura de las articulaciones primera a tercera de dicho montaje de articulación de hombro y la posición de dicho montaje de articulación de codo con respecto…
VEHICULO ROBOTICO CON CAPACIDAD DE NAVEGACION AUTONOMA DOTADO DE BRAZO ARTICULADO PARA LA MANIPULACION REMOTA DE OBJETOS.
(01/06/2004). Ver ilustración. Solicitante/s: UNIVERSIDAD DE MALAGA. Inventor/es: SIMON MATA,ANTONIO, OLLERO BATURONE,ANIBAL, MARTINEZ RODRIGUEZ,JORGE LUIS, GONZALEZ JIMENEZ,JAVIER, MARTINEZ SANCHEZ,MARIA ALCAZAR, MUÑOZ MARTINEZ,VICTOR, REINA TEROL,ANTONIO JESUS, FERNANDEZ MADRIGAL,JUAN ANTONIO, MUÑOZ RAMIREZ,ANTONIO JOSE.
Vehículo robótico con capacidad de navegación autónoma dotado de brazo articulado para la manipulación remota de objetos. La presente invención consiste en una máquina programable de uso general compuesta de un vehículo con capacidad de navegación en interiores y de un brazo articulado dotado de una garra servo- controlada para el manejo remoto de objetos. El sistema robot comprende un sistema de manipulación autónomo, un sistema de locomoción que emplea ruedas, un sistema sensorial complejo y diverso, un sistema de control basado en una red de computadores, un sistema de alimentación eléctrica por baterías y un sistema de comunicaciones radio con estaciones remotas. El robot está preparado para desenvolverse en entornos estructurados, como edificios, almacenes o fábricas. Las tareas que es capaz de realizar el sistema robot incluyen coger, transportar y soltar pequeños objetos tales como libros o cintas de video y presionar o girar dispositivos sencillos como interruptores o picaportes.
(16/06/1998) LA INVENCION SE REFIERE A UN ROBOT INDUSTRIAL HUECO ESPECIALMENTE ADECUADO PARA TRABAJOS DE ELABORACION TALES COMO SOLDADURAS POR PUNTOS O POR ARCO, HERMETIZACION, PINTURA, ENCOLADO, FRESADO POR LASER, ETC. EL ROBOT CONSTA DE UN BRAZO ROBOT INFERIOR TUBULAR , CUYO EXTREMO INFERIOR SE ENCUENTRA ACOJINADO DE FORMA PIVOTANTE EN UN SOPORTE ROBOT ALREDEDOR DE UN PRIMER EJE PREFERENTEMENTE HORIZONTAL Y ACOJINADO DE FORMA ROTATIVA ALREDEDOR DE UN SEGUNDO EJE (B) QUE COINCIDE CON EL EJE LONGITUDINAL DEL BRAZO . HAY UN BRAZO ROBOT SUPERIOR TUBULAR CONECTADO DE FORMA ARTICULADA AL EXTREMO SUPERIOR DEL BRAZO ROBOT INFERIOR A TRAVES DE UN MIEMBRO DE JUNTA ARTICULADA A MODO DE MANGUITO…
BRAZO ROBOTICO PARA MANTENER UNA HERRAMIENTA EN LA POSICION DESEADA.
(01/07/1995) UN SISTEMA DE BRAZO ROBOTICO PERFECCIONADO PARA MANIPULAR LA LAMINATUBO LOCALIZADA DENTRO DE LA CABEZA DE CANAL DE PESO A TRAVES DEL NUCLEO DE UN GENERADOR DE VAPOR NUCLEAR. EL SISTEMA INCLUYE UN BRAZO ROBOTICO CUYAS ARTICULACIONES DE HOMBRO Y CODO SON ROTABLES SOLO EN EL PLANO PARALELO A LA LAMINATUBO , PARA ELIMINAR ASI LA IMPOSICION DE PARES DE TORSION VOLADIZAMENTE INDUCIDOS EN LOS MOTORES ELECTRICOS ACCIONANDO ESTAS ARTICULACIONES, AL IGUAL QUE PARA MINIMIZAR LA POSIBILIDAD DE INTERFERENCIAS MECANICAS ENTRE EL BRAZO Y LAS PAREDES 15 DEL CABEZA DE CANAL DE PASO. CADA UNO DE LOS CONJUNTOS DE ARTICULACIONES MOTORIZADAS DEL BRAZO INCLUYE REDUCTORES QUE MUEVEN LA ARTICULACION Y…
ROBOT MANIPULADOR DE GRAN DIMENSION Y DE CAPACIDAD FUERTE PARA LA UTILIZACION EN MEDIO ABIERTO.
(01/12/1993). Solicitante/s: POTAIN COMPAGNIE GENERALE DE BATIMENT ET DE CONSTRUCTION CBC. Inventor/es: GENDRAULT, MICHEL, ROCH, CHARLES ANDRE.
ESTE ROBOT ESTA DESTINADO A LA MANIPULACION DE CARGAS EN OBRAS DE CONSTRUCCION O EN OBRAS PUBLICAS. UN PORTADOR MOTORIZADO CONTIENE UN MASTIL ORIENTABLE Y UN BRAZO DESPLEGABLE Y REPLEGABLE ARTICULADO EN LA CIMA DEL MASTIL, Y REALIZADO EN VARIOS ELEMENTOS ARTICULADOS ENTRE SI. EL EXTREMO DEL BRAZO ESTA UNIDO POR UN ENLACE MOTORIZADO CON UN BRAZO COMPENSADOR MOTORIZADO TELESCOPICO Y ORIENTABLE, QUE POSEE AL MENOS UN GRADO DE LIBERTAD REDUNDANTE Y EQUIPADO DE UN PORTA PRENSOR DE DETECCION DE ESFUERZOS QUE SOPORTA UN PRENSOR UNOS MEDIOS DE ACCIONAMIENTO Y DE CONTROL ESTAN PREVISTOS PARA LA MOTORIZACION DEL PORTADOR DEL BRAZO COMPENSADOR Y DEL ENLACE , MIENTRAS QUE OTROS MEDIOS ALIMENTAN CON ENERGIA ACCIONAN Y CONTROLAN EL PRENSOR.
PROCEDIMIENTO DE INSTALACION DE UN ROBOT PORTAHERRAMIENTAS DESTINADO A TRABAJAR EN MEDIOS HOSTILES AL HOMBRE (INSTALACIONES NUCLEARES).
(01/10/1992). Solicitante/s: HISPANO-SUIZA SOCIETE ANONYME DITE:. Inventor/es: GERY, DANIEL EDOUARD, MEUNIER, PHILIPPE.
EL ROBOT SE INSTALA DE UNA MANERA AUTONOMA, FIJANDO PROVISIONALMENTE SU CABEZA EN UN PUNTO CONOCIDO, LUEGO APOYANDOSE SOBRE DICHO PUNTO SE LLEVA SU PLANTILLA A LA POSICION DE TRABAJO Y AL FINAL SE EFECTUA UN RESTABLECIMIENTO SOBRE SI MISMO PARA SITUAR LA CABEZA EN LA ZONA DE INTERVENCION, PASANDO POR LA ABERTURA EFECTUADA EN EL RECINTO.
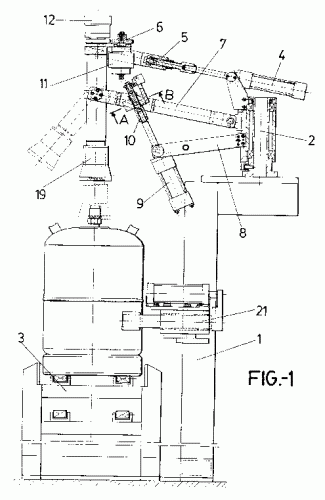
DISPOSITIVO PARA RETIRAR LAS CAPERUZAS DE LOS ENVASES DE GASES LICUADOS DEL PETROLEO.
(16/11/1990). Ver ilustración. Solicitante/s: REPSOL BUTANO, S.A.. Inventor/es: ANTUNEZ JIMENEZ,JOSE, VELA LUMBRERAS, ANTONIO.
DISPOSITIVO PARA RETIRAR LAS CAPERUZAS DE LOS ENVASES DE GASES LICUADOS DEL PETROLEO, QUE SITUADO EN UN TRAMO RECTO DE LA CADENA DE RELLENADO DE LOS ENVASES O BOMBONAS, ACOMETE A ESTOS DE DOS EN DOS, MEDIANTE UN CUERPO CILINDRICO DOTADA DE UN CILINDRO NEUMATICO DE CARRERA CORTA EN UN EXTREMO SUPERIOR Y UN CABEZAL EN EL EXTREMO INFERIOR, ARTICULADO MEDIANTE DOS BRAZOS UNO SUPERIOR CON CILINDRO NEUMATICO Y OTRO INTERMEDIO, QUE ASUME MOVIMIENTOS, ASCENDENTE Y DESCENDENTE Y DE ROTACION, MEDIANTE LOS QUE CUBRE, APRIETA Y DESENRROSCA LA CAPERUZA, PARA ASCENDER VERTICALMENTE DESPUES, PIVOTAR OBLICUAMENTE UNOS 45G Y SINCRONICAMENTE AFLOJAR LA MORDAZA Y EXPULSAR LA CAPERUZA EMPUJANDOLA CON UNA AGUJA EXTRACTORA HACIA UNA TOLBERA QUE CONDUCE LAS CAPERUZAS HACIA EL TRAMO DE RECAPUCHADO TRAS EL RELLENADO DE LOS ENVASES.
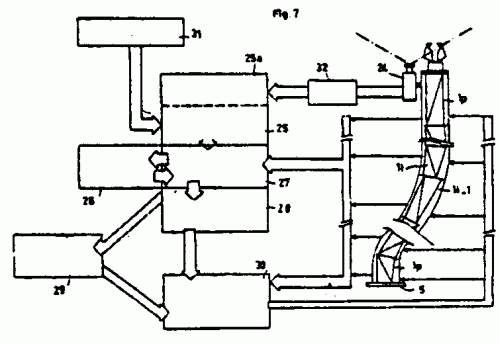
ROBOT REDUNDANTE DE TIPO MODULAR.
(01/05/1989). Ver ilustración. Solicitante/s: LOGABEX SOCIETE A RESPONSABILITE LIMITEE. Inventor/es: DURAND, DIDIER, CH\'HAYDER, AMEUR, DIAZ, CONSTANTINO.
LA INVENCION SE REFIERE A UN ROBOT REDUNDANTE DE TIPO MODULAR, QUE PERMITE DESPLAZAR UN TERMINAL DE UNA SITUACION INICIAL HACIA UNA SITUACION FINAL. ESTE ROBOT COMPRENDE UNA SUCESION DE MODULOS, CADA UNO CONSTITUIDO POR UNA PLATAFORMA Y POR SEIS ACCIONADORES DISPUESTOS SEGUN UNA ARQUITECTURA ANGULADA CERRADA, UN SISTEMA DE CAPTADORES ASOCIADO A CADA MODULO, Y UNOS MEDIOS DE MANDO QUE PERMITEN DETERMINAR UNA CONFIGURACION DEL ROBOT QUE CORRESPONDE A LA SITUACION FINAL A ALCANZAR POR EL TERMINAL Y PARA CONDICIONAR LOS ACCIONADORES PARA DISPONER LOS DIVERSOS MODULOS SEGUN ESTA CONFIGURACION. ESTOS MEDIOS DE MANDO COMPRENDEN EN PARTICULAR MEDIOS DE ALMACENADO DE LOS ESPACIOS ACCESIBLES PARA CADA PLATAFORMA, MEDIOS DE TOMA DE LA SITUACION FINAL A ALCANZAR, MEDIOS DE CALCULO DE LA CONFIGURACION DEL ROBOT, Y MEDIOS DE CALCULO DE ESTADOS DE LOS ACCIONADORES Y UNA INTERFAZ DE CONDICIONADO DE ESTOS ULTIMOS.
UN METODO Y UNA INSTALACION DE ROBOT PARA EL CONTROL PROGRAMADO DE UNA HERRAMIENTA DE TRABAJO.
(01/10/1988) UN METODO E INSTALACION DE ROBOT PARA EL CONTROL PROGRAMADO DE UNA HERRAMIENTA DE TRABAJO, PARA EJECUTAR OPERACIONES DE TRATAMIENTO SOBRE UN OBJETO, SOBRE LA BASE DE UNOS DATOS (K) DE RECORRIDO DE HERRAMIENTA PREPROGRAMADOS ALMACENADOS (L) EN UNA MEMORIA (U) DE DATOS, QUE UTILIZA PARA ESTA FINALIDAD UN SISTEMA (MP) DE BRAZO ROBOT MOVIL SERVOACCIONADO QUE TIENE MAS DE SEIS GRADOS DE LIBERTAD. DURANTE LA PROGRAMACION, QUE SE EJECUTA MEDIANTE LA GUIA MANUAL DE LA HERRAMIENTA Y DEL SISTEMA DE BRAZO ROBOT, DICHOS DATOS DEL RECORRIDO SE DERIVAN EN UN SISTEMA (A) DE COORDENADAS EXTERIOR, SIN CONEXION FISICA CON EL SISTEMA DE BRAZO DE ROBOT. CON LA GUIA MANUAL, LAS PARTES CONTROLADAS DEL SISTEMA…
{kind=link}
{kind=link}
{kind=link}