CIP-2021 : B25J 9/08 : caracterizado por elementos de construcción modulares.
CIP-2021 › B › B25 › B25J › B25J 9/00 › B25J 9/08[1] › caracterizado por elementos de construcción modulares.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 9/00 Manipuladores de control programado.
B25J 9/08 · caracterizado por elementos de construcción modulares.
CIP2021: Invenciones publicadas en esta sección.
ADAPTADOR PARA SEGURIDAD EN COMUNICACIONES ROBÓTICAS.
(11/06/2020). Solicitante/s: ERLE ROBOTICS, S.L. Inventor/es: MAYORAL VILCHES,Victor, ZAMALLOA UGARTE,Irati, MUÑIZ ROSAS,Aday, IBÁÑEZ BURGOS,Carlos, BILBAO CALVO,Asier, USATEGUI SAN JUAN,Lander.
La invención consiste en un dispositivo adaptador para componentes robóticos que proporciona soluciones mecánicas, de estructura, electrónicas, de potencia, de software y de seguridad. Mediante el presente dispositivo adaptador, diferentes componentes robóticos de diferentes fabricantes pueden ser fácilmente enlazados e integrados en un sistema robótico cualquiera sin necesidad de recurrir a la reestructuración y reconfiguración individualizada de cada componente para adaptarlo a los requisitos específicos del sistema robótico en cuestión. La presente divulgación proporciona soluciones de seguridad reforzadas para las comunicaciones realizadas entre los componentes integrados y el sistema robótico.
SISTEMA EN MÓDULO PARA COMPONENTES ROBÓTICOS.
(26/03/2020). Solicitante/s: ERLE ROBOTICS, S.L. Inventor/es: MAYORAL VILCHES,Victor, ZAMALLOA UGARTE,Irati, MUÑIZ ROSAS,Aday, MUGURUZA GOENAGA,Iñigo, LAMPÉREZ ZUBIA,Jorge.
Sistema en módulo para componentes robóticos.
En este documento se describe de forma detallada y con la inclusión de un ejemplo de implementación de la correspondiente invención, así como de las correspondientes figuras representativas del objeto de la misma, un sistema en módulo para el desarrollo de componentes robóticos, particularmente componentes robóticos modulares, en la medida en que dicho sistema en módulo proporciona las abstracciones básicas necesarias por las cuales se consiguen concentrar las tareas de desarrollo más difíciles en un solo aparato que no necesita ser modificado para cada caso de uso concreto.
PDF original: ES-2750646_A1.pdf
Estructura modular de exoesqueleto para la asistencia al esfuerzo de un usuario.
(12/02/2020) Estructura modular de exoesqueleto para la asistencia al esfuerzo de un usuario, que comprende:
- un módulo de base que comprende un cinturón lumbar apropiado para rodear la cintura del usuario, una primera batería y una unidad de mando fijadas al cinturón lumbar ,
- un módulo de espalda apropiado para ser fijado sobre la espalda del usuario, comprendiendo el módulo de espalda una segunda batería ,
- una primera pieza de fijación fijada al cinturón y apropiada para cooperar con una segunda pieza de fijación complementaria de un módulo de cadera para sujetar el módulo de cadera al módulo…
Kit robótico reconfigurable.
(08/01/2020) Un sistema robótico reconfigurable, que comprende:
una pluralidad de módulos servo digitales, en donde cada uno de la pluralidad de módulos servo digitales incluye un servomotor que incluye un sensor de posición del servo;
una pluralidad de bloques de construcción elementales, en donde la pluralidad de bloques de construcción elementales está conectada a la pluralidad de módulos servo digitales para construir una figura robótica que tiene articulaciones controladas por posición, en donde los bloques de construcción elementales son combinables con la pluralidad de módulos servos digitales para construir figuras…
Pinza con reductor de velocidad de motor indexable.
(27/02/2019) Pinza para robot, que comprende:
un mecanismo de agarre que tiene una entrada de movimiento de mordaza, un primer conjunto de mordaza y un segundo conjunto de mordaza , residiendo y moviéndose los conjuntos de mordaza primero y segundo en un plano;
una combinación de reductor de velocidad del motor que reside en un plano e incluye un reductor de velocidad y un motor , teniendo dicho reductor de velocidad una salida de movimiento;
teniendo dicho mecanismo de agarre un primer patrón de elementos de montaje dispuestos alrededor de dicha entrada de movimiento de mordaza;
teniendo dicho reductor de velocidad un segundo patrón de elementos de montaje dispuestos alrededor…
ESTRUCTURA MODULAR ADAPTABLE PARA EFECTORES FINALES DE BRAZOS ROBÓTICOS.
(23/01/2019) 1. Estructura modular adaptable para efectores finales de brazos robóticos caracterizada por que comprende:
a. una pieza superior de soporte para efectores finales, esta pieza compuesta por:
i. dos tiradores,
ii. dos barras de tiradores,
iii. dos espacios interiores entre pestañas para alojar las barras de los tiradores,
iv. abertura superior adaptada a la morfología e interfaz de conexión del efector final,
v. orificios de ajuste y atornillado a la base del efector final,
vi. abertura lateral para exposición de puertos de comunicación,
vii. espacio interior para la instalación de placas de desarrollo;…
MODULO ROBÓTICO Y ROBOT MODULAR QUE COMPRENDE DICHO MÓDULO ROBÓTICO.
(04/10/2018). Solicitante/s: UNIVERSIDAD MIGUEL HERNANDEZ. Inventor/es: MARIN LOPEZ,JOSE MARIA, JIMENEZ GARCIA,LUIS MIGUEL, REINOSO GARCÍA,Óscar, ÚBEDA GONZÁLEZ,David, GIL APARICIO,ARTURO, PAYÁ CASTELLÓ,Luis, BALLESTA GALDEANO,Mónica, PEIDRO VIDAL,Adrián.
Modulo robótico que mediante un actuador único puede moverse por entornos tridimensionales. El módulo robótico es de configuración sencilla y ligera con un bastidor en el interior del que se encuentra un primer eje accionado por el actuador . Para poder realizar el desplazamiento tridimensional comprende al menos dos mecanismos de transmisión encargados del movimiento de unos medios de transmisión solidarios a unos ejes que comprenden medios de adhesión en sus extremos. El desplazamiento se realiza fijando uno de los medios de adhesión a la superficie de forma que el bastidor rota sobre el eje que comprende dicho medio de fijación se describe también un robot modular que comprende una pluralidad de módulos robóticos para permitir el desplazamiento por entornos más complejos.
MÓDULO ROBÓTICO Y ROBOT MODULAR QUE COMPRENDE DICHO MÓDULO ROBÓTICO.
(02/10/2018). Solicitante/s: UNIVERSIDAD MIGUEL HERNANDEZ. Inventor/es: MARIN LOPEZ,JOSE MARIA, JIMENEZ GARCIA,LUIS MIGUEL, REINOSO GARCÍA,Óscar, ÚBEDA GONZÁLEZ,David, GIL APARICIO,ARTURO, PAYÁ CASTELLÓ,Luis, BALLESTA GALDEANO,Mónica, PEIDRO VIDAL,Adrián.
Módulo robótico y robot modular que comprende dicho módulo robótico.
Modulo robótico que mediante un actuador único puede moverse por entornos tridimensionales. El módulo robótico es de configuración sencilla y ligera con un bastidor en el interior del que se encuentra un primer eje accionado por el actuador .Para poder realizar el desplazamiento tridimensional comprende al menos dos mecanismos de transmisión encargados del movimiento de unos medios de transmisión solidarios a unos ejes que comprenden medios de adhesión en sus extremos. El desplazamiento se realiza fijando uno de los medios de adhesión a la superficie de forma que el bastidor rota sobre el eje que comprende dicho medio de fijación. Se describe también un robot modular que comprende una pluralidad de módulos robóticos para permitir el desplazamiento por entornos más complejos.
PDF original: ES-2684377_A1.pdf
MÉTODO DE DETERMINACIÓN DE CONFIGURACIÓN DE UN ROBOT MODULAR.
(27/03/2018). Solicitante/s: ERLE ROBOTICS, S.L. Inventor/es: MAYORAL VILCHES,Victor.
Método de determinación de configuración de un robot modular.
Se describe de forma detallada, y con la inclusión de un ejemplo de implementación de la correspondiente invención, un método que permite llevar a cabo la configuración de robots a partir de sus distintos componentes. Para llevar a cabo dicho método se hace uso de datos inerciales que se captan mediante, o se encuentran definidos en, elementos insertados en cada uno de los distintos componentes que configuran el robot. A partir de dichos datos se hace posible determinar la ubicación de cada uno de los componentes, así como sus distintas capacidades, lo cual permite la reconfiguración de un robot cuando se inserta o elimina un componente del mismo. El objeto de la invención también permite generar un mapa físico del robot a partir de los datos de ubicación de cada uno de los componentes.
PDF original: ES-2661067_A1.pdf
MÉTODO DE CONFIGURACIÓN DE UN ROBOT.
(28/12/2017). Solicitante/s: ERLE ROBOTICS, S.L. Inventor/es: MAYORAL VILCHES,Victor.
Se describe de forma detallada, y con la inclusión de un ejemplo de implementación de la correspondiente invención, un método que permite llevar a cabo la configuración de robots a partir de sus distintos componentes. Para llevar a cabo dicho método se hace uso de datos inerciales que se captan mediante, o se encuentran definidos en, elementos insertados en cada uno de los distintos componentes que configuran el robot. A partir de dichos datos se hace posible determinar la ubicación de cada uno de los componentes así como sus distintas capacidades, lo cual permite la reconfiguración de un robot cuando se inserta o elimina un componente del mismo. El objeto de la invención también permite generar un mapa físico del robot a partir de los datos de ubicación de cada uno de los componentes.
(14/09/2012) El robot tensegrítico objeto de la invención permite el movimiento controlado y adaptar su tamaño a diversos espacios, gracias a su configuración basada en una estructura tensegrítica actuada mediante motores controlador por medios electrónicos y de control que determinan la longitud de los elementos controlables de la estructura.
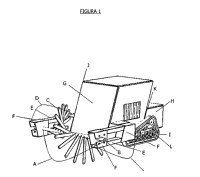
VEHICULO BARREMINAS TELEOPERADO MODULAR DESARMABLE Y TRANSPORABLE.
(02/08/2012). Ver ilustración. Solicitante/s: TECNOLOGIAS MARTES S.A.S. Inventor/es: BETANCUR,Javier.
El vehículo teleoperado barreminas modular desarmable y transportable es un vehículo que integra una herramienta de desminado tipo "flail" que incorpora cadenas y elementos de corte según las necesidades. Esta herramienta esta sostenida, por dos brazos blindados, de la estructura o chasis frontal, la cual contiene un motor de combustión suspendido sobre un mecanismo de cambio de nivel, que permite al vehículo alcanzar pendientes superiores a 45°. El chasis frontal se une mediante una lamina metálica a un chasis trasero que contiene los motores de tracción y las baterías, dejando un espacio entre ambos que permite una vía de salida a los gases de una posible detonación. A dicho chasis se conectan las orugas. El chasis frontal tiene un ángulo que permite la reflexión de la onda explosiva generada por las minas. Todos estos elementos están unidos de una forma modular que permite desarmar el vehículo en piezas que no superen los 40 Kg.
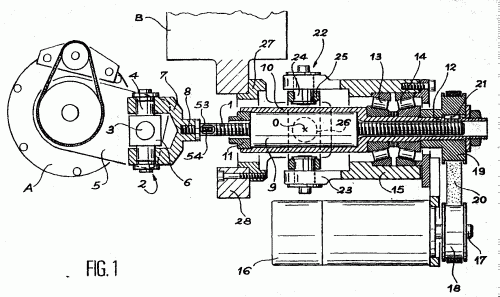
ELEMENTO DE UNION DE UN GATO DE TUERCA Y TORNILLO Y SU APLICACION EN UN BRAZO DE ROBOT.
(01/07/2004). Ver ilustración. Solicitante/s: COMMISSARIAT A L'ENERGIE ATOMIQUE COMPAGNIE GENERALE DES MATIERES NUCLEAIRES. Inventor/es: JOUAN DE KERVENOAEL, TANGUY.
Elemento de unión entre una primera pieza (A) y una segunda pieza (B), que comprende un gato de tuerca y de tornillo acoplado a través de la tuerca , un cuerpo de gato en el que se sostiene la tuerca mediante unos cojinetes con libertad de girar, un motor capacitado para producir rotaciones entre el tornillo y la tuerca y unos primeros y segundos medios de empalme entre la primera pieza y el tornillo y entre la segunda pieza y la tuerca, caracterizado porque los primeros y segundos medios de empalme consisten en dos cardanes, admitiendo los cardanes cada uno dos ejes de rotación perpendiculares al tornillo y a la tuerca, y los ejes de rotación de uno de los cardanes convergen hacia el centro de la tuerca.
SISTEMA DE SUMINISTRO DE ENERGIA PARA UN MANIPULADOR.
(16/04/1999). Solicitante/s: ASEA BROWN BOVERI AB. Inventor/es: KULLBORG, OVE, MYKLEBUST, EINAR.
UN SISTEMA DE SUMINISTRO DE ENERGIA PARA UN MANIPULADOR, POR EJEMPLO UN ROBOT INDUSTRIAL, CUYO MANIPULADOR INCLUYE UNA PLURALIDAD DE ELEMENTOS ACCIONADORES PARA MOVER EL MANIPULADOR A TRAVES DE SU PLURALIDAD DE GRADOS DE LIBERTAD. CADA ELEMENTO ACCIONADOR (1C,1D) COMPRENDE AL MENOS UN MOTOR ELECTRICO DE IMPULSION (2C,2D) Y UN ENGRANAJE DE REDUCCION (3C,3D). LOS MOTORES DE IMPULSION SON ALIMENTADOS Y CONTROLADOS A TRAVES DE UN RECTIFICADOR Y DE UNOS DISPOSITIVOS DE ACCIONAMIENTO (7C,7D). SEGUN LA INVENCION, AL MENOS UNO DE DICHOS DISPOSITIVOS DE ACCIONAMIENTO SE ENCUENTRA COLOCADO SOBRE EL MANIPULADOR AL LADO DE SU ELEMENTO DE ACCIONAMIENTO ASOCIADO (1C,1D). EL RECTIFICADOR PUEDE CONSISTIR TAMBIEN EN UNA PLURALIDAD DE UNIDADES MAS PEQUEÑAS DISPUESTAS SOBRE EL MANIPULADOR Y CADA UNA DE ELLAS PUEDE ALIMENTAR A UN DISPOSITIVO DE ACCIONAMIENTO SOLAMENTE O A UN GRUPO DE ELLOS SOLAMENTE.
DISPOSITIVO PARA MANIPULACION DE OBJETOS.
(16/04/1997). Solicitante/s: STADELE, BERTA. Inventor/es: STADELE, ERHARD.
EN UN DISPOSITIVO PARA LA MANIPULACION DE OBJETOS CON AL MENOS UNA UNIDAD DE AGARRE, QUE ESTA CONECTADA POR MEDIO DE AL MENOS UN BRAZO A UN MECANISMO MOTRIZ Y A UN MOTOR DE ACCIONAMIENTO, ESTA PROVISTO CON AL MENOS UN EJE HUECO EN EL BRAZO, SIENDO TRANSMISIBLE EL MOVIMIENTO DE ROTACION DEL EJE A UN EJE SUBSECUENTE. EL EJE HUECO ENGRANA POR MEDIO DE ASPILLERAMIENTOS DENTRO DE CAVIDADES DE UNA UNIDAD DE ACOPLAMIENTO, TENIENDO LA UNIDAD DE ACOPLAMIENTO UN DENTADO HELICOIDAL EN SU OTRO EXTREMO.
(16/03/1996). Solicitante/s: COMAU S.P.A.. Inventor/es: ZONA, MAURO, BETTINARDI, MARCO.
EL ARMAZON DE UN BRAZO DE UN ROBOT ARTICULADO TIENE UNA ESTRUCTURA EN FORMA CONCHIFERA, LA CUAL DESEMPEÑA UNA FUNCION DE CARGA Y ALOJA UN MODULO CONTENIENDO LA UNIDAD MOTOR Y TRANSMISION AFIN.
DISPOSITIVO PARA SUJETAR UN ROBOT SOBRE UN BRAZO DE SOPORTE.
(01/05/1995). Solicitante/s: COMAU S.P.A.. Inventor/es: ZONA, MAURO, BETTINARDI, MARCO.
UN ROBOT ARTICULADO TIENE UNA SUJECCION SIMILAR A UNAS PINZAS CON UNA PARTE CENTRAL Y DOS PARTES PIVOTANTES QUE SE ARTICULAN CON LA PARTE CENTRAL , LA SUJECCION SIRVE PARA CONECTAR EL ROBOT A UN BRAZO DE SOPORTE DE FORMA FIJA O DESLIZABLE.
ROBOT MANIPULADOR DE GRAN DIMENSION Y DE CAPACIDAD FUERTE PARA LA UTILIZACION EN MEDIO ABIERTO.
(01/12/1993). Solicitante/s: POTAIN COMPAGNIE GENERALE DE BATIMENT ET DE CONSTRUCTION CBC. Inventor/es: GENDRAULT, MICHEL, ROCH, CHARLES ANDRE.
ESTE ROBOT ESTA DESTINADO A LA MANIPULACION DE CARGAS EN OBRAS DE CONSTRUCCION O EN OBRAS PUBLICAS. UN PORTADOR MOTORIZADO CONTIENE UN MASTIL ORIENTABLE Y UN BRAZO DESPLEGABLE Y REPLEGABLE ARTICULADO EN LA CIMA DEL MASTIL, Y REALIZADO EN VARIOS ELEMENTOS ARTICULADOS ENTRE SI. EL EXTREMO DEL BRAZO ESTA UNIDO POR UN ENLACE MOTORIZADO CON UN BRAZO COMPENSADOR MOTORIZADO TELESCOPICO Y ORIENTABLE, QUE POSEE AL MENOS UN GRADO DE LIBERTAD REDUNDANTE Y EQUIPADO DE UN PORTA PRENSOR DE DETECCION DE ESFUERZOS QUE SOPORTA UN PRENSOR UNOS MEDIOS DE ACCIONAMIENTO Y DE CONTROL ESTAN PREVISTOS PARA LA MOTORIZACION DEL PORTADOR DEL BRAZO COMPENSADOR Y DEL ENLACE , MIENTRAS QUE OTROS MEDIOS ALIMENTAN CON ENERGIA ACCIONAN Y CONTROLAN EL PRENSOR.
SISTEMA ROBOTIZADO AUTOMATICO.
(01/07/1990) Sistema robotizado totalmente automático de soldadura por puntos, de remachado o de atornillado, que incluye un robot estandar , con un dispositivo intercambiable de soldadura por puntos, de remachado o de atornillado (10a), que lleva a cabo el movimiento activo de dicho dispositivo (10a), un bastidor modular estandar de forma reticular para la recepción de una pieza de trabajo , y un pórtico que va guiado por vías a lo largo del suelo y que tiene un robot especial móvil sobre el pórtico, que está configurado como un soporte de elementos de electrodos o de remachado o de atornillado (14a) programable en siete ejes, robot especial al que han sido añadidos uno o más soportes cargadores móviles, programables y controlables electrónicamente, de elementos de electrodos o de remachado o de atornillado, así como un puente de conexión…
{kind=link}
{kind=link}