CIP-2021 : B25J 5/04 : en los que el camino-guía es también móvil, p. ej. del tipo puente rodante.
CIP-2021 › B › B25 › B25J › B25J 5/00 › B25J 5/04[2] › en los que el camino-guía es también móvil, p. ej. del tipo puente rodante.
Notas[t] desde B21 hasta B32: CONFORMACION
B TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES.
B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES.
B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06).
B25J 5/00 Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00).
B25J 5/04 · · en los que el camino-guía es también móvil, p. ej. del tipo puente rodante.
CIP2021: Invenciones publicadas en esta sección.
Procedimiento de tratamiento de una superficie, y autómata correspondiente.
(20/05/2020) Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de:
- una base configurada para desplazarse por un suelo,
- una plataforma montada sobre la base y configurada para desplazarse, al menos en parte, perpendicularmente a la base , por ejemplo, verticalmente, y
- un medio de tratamiento , por ejemplo, un brazo, montado sobre la plataforma y que consta de un extremo móvil configurado para tratar una superficie dada,
procedimiento en donde: caracterizado por que
a) se divide la superficie a tratar en subdivisiones de superficie inferior o igual a la superficie dada, siendo las subdivisiones obtenidas por distribución de la superficie a tratar de acuerdo con una cuadrícula regular cuyas líneas corresponden a los desplazamientos de la plataforma y de la base ,
a') se…
SISTEMA DE CONEXIÓN Y DESCONEXIÓN AUTOMÁTICA DE CONTENEDORES REFRIGERADOS.
(19/09/2019). Solicitante/s: HERNANDEZ HERNANDEZ, Alba. Inventor/es: HERNANDEZ HERNANDEZ,Alba.
Sistema de conexión y desconexión automática de contenedores refrigerados.
Sistema que permite de forma automatizada la conexión y desconexión de contenedores refrigerados, contando el sistema con: Un adaptador dispuesto sobre cada contenedor y provisto de un conector de conexión frontal; un sistema de guiado según direcciones (x, y) de una plataforma móvil provista de al menos una cámara de reconocimiento óptico y con un brazo de extensible provisto en su extremo con un adaptador de conexión frontal y unos medios de control encargados de la búsqueda del adaptador de cada contenedor, desplazamiento de la plataforma móvil, y aviso a un sistema de control de la acción realizada. El sistema reduce costes de mano de obra, evita accidentes de trabajo, reduce la factura de la luz, así como el tiempo de desconexión de cada contenedor.
PDF original: ES-2725127_A1.pdf
Robot oruga y plataforma de soporte.
(15/05/2019) Aparato que comprende un sistema de oruga y un robot oruga, comprendiendo el robot oruga:
un primer sistema de movimiento configurado para mover el robot oruga y el sistema de oruga a lo largo de una superficie no plana, donde el sistema de oruga es un sistema de oruga flexible configurado para doblarse para adaptarse sustancialmente a un contorno de la superficie no plana; y
un segundo sistema de movimiento configurado para mover el robot oruga a lo largo del sistema de oruga flexible en la superficie 230, en el que:
el primer sistema de movimiento puede moverse entre un estado 215 extendido y un estado retraído; cuando el primer sistema de movimiento está en estado extendido, el sistema de oruga flexible no puede extenderse…
Robot- máquina automática de pintado de estructuras (R-MAPE).
(09/01/2019). Solicitante/s: ROCA VILARIÑO, David. Inventor/es: ROCA VILARIÑO,David.
Robot-Máquina Automática de Pintado de Estructuras (R-MAPE) dotada de una cabina de supervisión y control , con estructura para movimiento de traslación longitudinal con carro con movimiento transversal y sistema de giro de torre telescópica con movimiento vertical , brazo telescópico horizontal y robot de pintado . Incorpora sistema de almacenamiento con depósitos para pintura y bombas neumáticas para impulsión de pintura a la pistola incorporada en el robot . Incorpora cámaras de control de vigilancia y hardware de visión artificial mediante escáner láser 3D , cámaras inteligentes 3D, sensores de distancia focal y láser de medición integrado en robot para reconocimiento de geometría estructural y acabado superficial, con adquisición de imágenes y posterior procesado de las mismas con software de visión con el que se consigue trayectoria y guiado de robot para el pintado automático de la estructura.
PDF original: ES-2695627_A1.pdf
Método y aparato para posicionar sistemas de procesamiento automatizados.
(13/09/2018) Un aparato para posicionar un sistema de procesamiento automatizado que tiene una pista que puede engancharse con una superficie, comprendiendo el aparato:
un chasis que lleva de manera selectiva el sistema de procesamiento automatizado y la pista ;
al menos tres ruedas (208, 208') conectadas al chasis que soportan de manera selectiva el chasis en la superficie y permiten de manera selectiva el movimiento del chasis alrededor de la superficie;
un componente de accionamiento operativamente conectado a las ruedas (208, 208') que propulsa de manera selectiva las ruedas (208, 208') para mover el chasis alrededor de la superficie;
un componente de elevación que mueve de manera selectiva el chasis entre una primera…
Manipulador robotizado, para movimiento de cargas.
(08/07/2013) Manipulador robotizado para movimiento de cargas, que puede disponerse en un soporte (S) en posición de recogida y suspendido de una grúa o puente-grúa (P) en posición operativa.
Consta de, al menos, una columna integrada por una pluralidad de porciones en disposición telescópica; un brazo articulado a la última de dichas porciones telescópicas y portador de la correspondiente garra, horquilla o elemento acoplado en su punta; un carro que, acoplado con rodadura sobre los perfiles estructurales de la grúa o puente-grúa (P), permite rodar con precisión en los movimientos transversal, longitudinal y de elevación; un anclaje , que relaciona entre sí la columna y el carro mediante un sistema de amarre rápido entre ellos; y un sistema de enganche rápido…
DISPOSITIVO PARA LA MANIPULACIÓN Y/O ELABORACIÓN DE OBJETOS.
(15/07/2011) Dispositivo para la manipulación y/o elaboración de objetos, que comprende: - al menos un primer brazo que comprende una primera extremidad (2a) de sostén de una herramienta ; - medios de sostén y movimiento del primer brazo ; donde los medios de sostén y movimiento comprenden al menos un primer motor eléctrico lineal , que se extiende por un recorrido cerrado (P), para mover el primer brazo a lo largo de una trayectoria circular (⟨1), y al menos un segundo motor eléctrico lineal , que se extiende por un recorrido arqueado (S), para mover el primer brazo a lo largo de una trayectoria semicircular (⟨2)
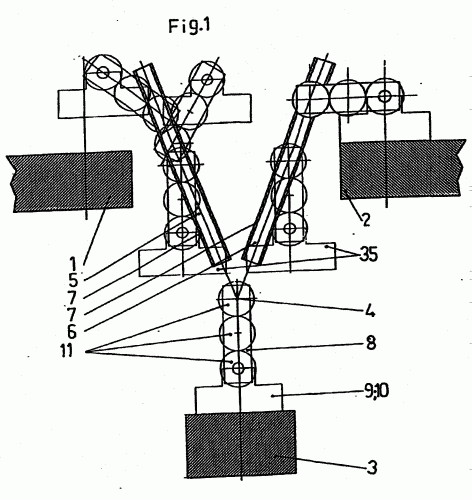
DISPOSITIVO DE TRANSPORTE PARA CONJUNTOS CONSTRUCTIVOS DE SOLDADURA PARA CARROCERIAS DE AUTOMOVILES.
(16/12/2005). Ver ilustración. Solicitante/s: THYSSENKRUPP DRAUZ GMBH. Inventor/es: BUNNING, KLAUS, ROHLAND, JORG.
Dispositivo de transporte para conjuntos constructivos de soldadura para carrocerías de automóviles, en especial conjuntos constructivos de fondo, con dos cintas transportadoras de techo y un dispositivo de sujeción de obra bruta, transportándose estos conjuntos constructivos de soldadura, desde la primera cinta transportadora de techo al dispositivo de sujeción de obra bruta, y desde allí a la segunda cinta transportadora de techo, estando provistos los dispositivos de transporte con guías, carrillos que se trasladan por ellas, así como garras para componentes constructivos.
SISTEMA PARA REALIZAR OPERACIONES SOBRE OBJETOS DE GRANDES DIMENSIONES ESPECIALMENTE PARA PINTAR UNA AERONAVE.
(01/04/1993). Solicitante/s: AEROSPATIALE SOCIETE NATIONALE INDUSTRIELLE, SOCIETE ANONYME DITE:. Inventor/es: JONCA, HENRI VALENTIN JEAN RESIDENCE DES FONTAINES, SARRAMEA, CLAUDE.
EL PRESENTE INVENTO ES UN SISTEMA PARA REALIZAR UNAS OPERACIONES SOBRE OBJETOS DE GRANDES DIMENSIONES, ESPECIALMENTE PARA PINTAR AERONAVES. SEGUN EL INVENTO, LOS MEDIOS DE CONTROL DEL SISTEMA SIRVEN, PREVIAMENTE A LA EJECUCION DE UN TRABAJO PREDETERMINADO PARA: - CONTROLAR EL DESPLAZAMIENTO DE UNOS PRIMEROS Y SEGUNDOS MEDIOS MOVILES, MEDIANTE UNOS MEDIOS MOTORES HACIA UNA POSICION DE CONSIGNA; - RECIBIR INFORMACIONES DE UNOS MEDIOS DE DETECCION MONTADOS EN LOS PRIMEROS Y SEGUNDOS MEDIOS MOVILES, PARA MEDIR LA SEPARACION ENTRE LA POSICION REAL DE DICHOS MEDIOS MOVILES Y DICHA POSICION DE CONSIGNA; - TROTAR DICHAS INFORMACIONES Y CONTROLAR, EN FUNCION DE ESTAS, EL DESPLAZAMIENTO DEL O DE LOS BRAZOS ARTICULADOS PARA LLEVAR EL ORGANO DE TRABAJO A UNA POSICION DE REFERENCIA. EL INVENTO SE APLICA ESPECIALMENTE PARA PINTAR AVIONES "GRUESO PORTADORES".
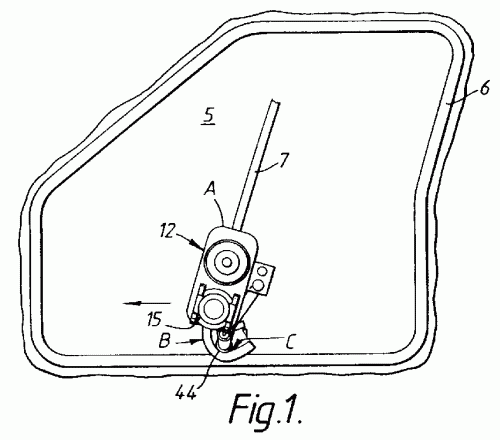
METODO Y APARATO PARA MONTAR UNA TIRA FLEXIBLE, EN PARTICULAR EN ABERTURAS DE CARROCERIAS DE VEHICULOS A MOTOR.
(16/07/1991). Ver ilustración. Solicitante/s: DRAFTEX INDUSTRIES LIMITED. Inventor/es: REUVERS, MARKUS, GOEDDERZ, DIETER.
METODO Y APARATO PARA MONTAR UNA TIRA FLEXIBLE , EN PARTICULAR EN ABERTURAS DE CARROCERIAS DE VEHICULOS A MOTOR, EN CONCRETO SOBRE UNA PESTAÑA DE MONTAJE , APARATO QUE COMPRENDE UNA MANO DE ROBOT SOSTENIDA AL FINAL DE UN BRAZO DE ROBOT. LA BANDA OBTURADORA ES RECIBIDA POR LA MANO DE ROBOT EN A Y HECHA AVANZAR A TRAVES DE DICHA MANO PARA SALIR POR B. SU EXTREMO SE ACOPLA A UNA ESPIGA MONTADA SOBRE UN DEDO PIVOTANTE. AL CONTINUAR EL MOVIMIENTO DE LA BANDA, ESTE DEDO PIVOTA Y OBLIGA A LA BANDA A SEGUIR UNA TRAYECTORIA CURVA EN TORNO A UN RODILLO DE GUIA SOBRE EL EXTREMO DEL BRAZO . EL BRAZO DE ROBOT MUEVE ENTONCES LA MANO DE ROBOT HACIA LA PESTAÑA , DE MODO QUE LA BANDA CURVADA SE ACOPLA A LA PESTAÑA . DESPUES, EL DEDO ES ACELERADO POR UN MOTOR PARA DEJAR SU ACOPLAMIENTO A LA BANDA. EL BRAZO DE ROBOT CONDUCE IMPULSA LA MANO DE ROBOT A LO LARGO DE LA PESTAÑA, TENDIENDO ASI LA BANDA SOBRE DICHA PESTAÑA.
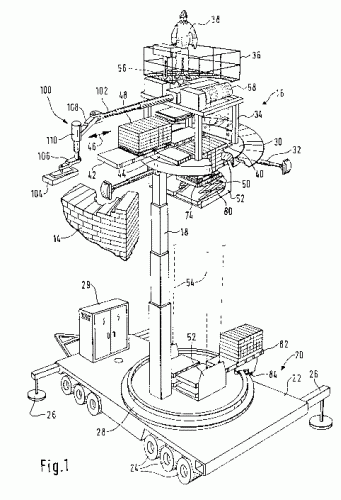
INSTALACION AUTOMATIZADA PARA LA COLOCACION DE UNA MAMPOSTERIA SOBRE UNA PARED.
(16/10/1990). Ver ilustración. Solicitante/s: PAUL WURTH S.A.. Inventor/es: KREMER, ANDRE, KONSBRUCK, JEANNOT, MELAN, CORNEILLE.
INSTALACION AUTOMATIZADA PARA LA COLOCACION DE UNA MAMPOSTERIA SOBRE UNA PARED, QUE COMPRENDE UN PUESTO OPERATIVO CON UNA PLATAFORMA DE TRABAJO DESPLAZABLE VERTICALMENTE EN EL INTERIOR DEL RECINTO Y CAPAZ DE GIRAR ALREDEDOR DEL EJE VERTICAL DE ESTE, UNAS AREAS DE ALMACENADO SIMULTANEO DE DOS PALETAS DE LADRILLOS SOBRE LA PLATAFORMA, UN ROBOT DE MANUTENCION Y DE COLOCACION DE LOS LADRILLOS, UN PUESTO DE VIGILANCIA Y DE MANDO, UNOS PUNTALES RETRAIBLES PARA LA ESTABILIZACION DEL PUESTO OPERATIVO, ASI COMO UNOS MEDIOS PARA SUBIR Y BAJAR UNAS PALETAS DE LADRILLOS. TODO EL PUESTO OPERATIVO ESTA SOPORTADO POR UN MASTIL TELESCOPICO MONTADO SOBRE UN PLATO GIRATORIO DE UN SUELO MOVIL QUE SE ENCUENTRA FUERA DEL RECINTO Y CON EL CUAL EL PUESTO OPERATIVO FORMA UNA UNIDAD ESCAMOTEABLE AUTOMOTRIZ O ARRASTRABLE.
{kind=link}
{kind=link}
{kind=link}