BANCO DE ENSAYOS PARA LA MEDICIÓN DE IMPACTOS.
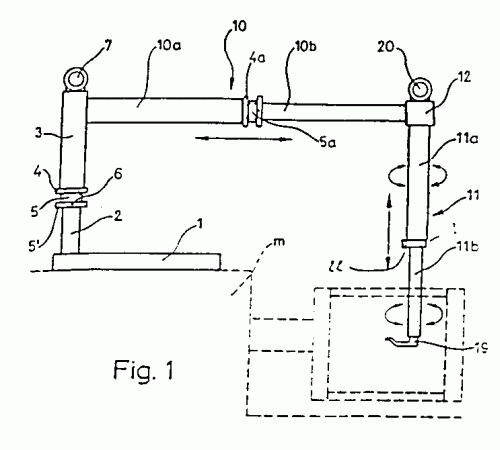
(03/06/2020) 1. Un banco de ensayos para la medición de impactos que comprende un primer soporte y un segundo soporte que se caracteriza porque el primer soporte está configurado por una base plana en la que está dispuesto perpendicularmente un soporte vertical en cuyo extremo superior queda fijado un brazo robot ; y donde el segundo soporte comprende una base o plataforma en la que está fijada perpendicularmente una columna vertical en la que está dispuesto un medidor HRC y configurado para medir el impacto generado por el robot en cualquier posición espacial y dirección. 2. El banco de ensayos de acuerdo con la reivindicación 1 donde la base del primer soporte comprende una pluralidad de taladros roscados distribuidos uniformemente sobre la superficie…
{kind=link}