CIP-2021 : G06T 7/00 : Análisis de imagen.
CIP-2021 › G › G06 › G06T › G06T 7/00[m] › Análisis de imagen.
G06T 7/10 · Segmentación; Detección de bordes (segmentación basada en el movimiento G06T 7/215).
Notas[n] de G06T 7/10:
G06T 7/11 · · Segmentación basada en la región.
G06T 7/12 · · Segmentación basada en los bordes.
G06T 7/13 · · Detección de bordes.
G06T 7/136 · · que utiliza umbralización.
G06T 7/143 · · que utiliza aproximaciones probabilísticas, p.ej. modelo de campo aleatorio de Markov [MRF].
G06T 7/149 · · que utiliza modelos deformables, p. ej. modelos de contorno activo.
G06T 7/155 · · que utiliza operadores morfológicos.
G06T 7/162 · · que utiliza métodos basados en gráficos.
G06T 7/168 · · que utiliza métodos de transformación de dominio.
G06T 7/174 · · que implica la utilización de dos o más imágenes.
G06T 7/181 · · que implica crecimiento de borde; que implica enlace de borde.
G06T 7/187 · · que implica crecimiento de región; que implica fusión de región; que implica etiquetado de componentes conectados.
G06T 7/194 · · que implica la segmentación del primer plano.
G06T 7/20 · Análisis del movimiento (estimación del movimiento para codificación, decodificación, compresión o descompresión de señales de vídeo digitales H04N 19/43, H04N 19/51).
G06T 7/207 · · para la estimación del movimiento sobre una jerarquía de resoluciones (estimación del movimiento multi-resolución o estimación jerárquica del movimiento para la codificación, decodificación, compresión o descompresión de señales de vídeo digitales H04N 19/53).
G06T 7/215 · · Segmentación basada en el movimiento.
G06T 7/223 · · utilizando block-matching.
G06T 7/231 · · · utilizando búsqueda completa.
G06T 7/238 · · · utilizando búsqueda incompleta, p. ej. búsqueda en tres pasos.
G06T 7/246 · · utilizando métodos basados en características, p. ej. el seguimiento de esquinas o segmentos.
G06T 7/254 · · que emplea la sustracción de imágenes.
G06T 7/262 · · utilizando métodos de transformación de dominio, p. ej. métodos de dominio de Fourier.
G06T 7/269 · · utilizando métodos basados en gradientes.
G06T 7/277 · · que utiliza aproximaciones estocásticas, p. ej. utilizando filtros Kalman.
G06T 7/285 · · utilizando una secuencia de pares de imágenes estéreo.
G06T 7/292 · · Seguimiento multi-cámara.
G06T 7/30 · Determinación de parámetros de transformación para la alineación de imágenes, es decir, registro de imagen.
G06T 7/32 · · utilizando métodos basados en correlación.
G06T 7/33 · · utilizando métodos basados en características.
G06T 7/35 · · utilizando métodos estadísticos.
G06T 7/37 · · utilizando métodos de transformación de dominio.
G06T 7/38 · · Registro de secuencias de imagen.
G06T 7/40 · Análisis de la textura (recuperación de la profundidad o forma de la textura G06T 7/529).
G06T 7/41 · · basado en la descripción estadística de la textura.
G06T 7/42 · · · utilizando métodos de transformación de dominio.
G06T 7/44 · · · utilizando operadores de imagen, p. ej. filtros, indicadores de densidad de contorno o histogramas locales.
G06T 7/45 · · · utilizando cálculo matricial de co-ocurrencia.
G06T 7/46 · · · utilizando campos aleatorios.
G06T 7/48 · · · utilizando fractales.
G06T 7/49 · · basado en la descripción de la textura estructural, p.ej. utilizando primitivos o reglas de colocación.
G06T 7/50 · Recuperación de profundidad o forma.
G06T 7/507 · · a partir de sombreado (G06T 7/586 tiene prioridad).
G06T 7/514 · · a partir de reflejos.
G06T 7/521 · · a partir de láser, p. ej. utilizando interferometría; a partir de la proyección de luz estructurada.
G06T 7/529 · · a partir de la textura.
G06T 7/536 · · a partir de efectos de perspectiva, p. ej. utilizando puntos de fuga.
G06T 7/543 · · a partir de dibujos de línea.
G06T 7/55 · · a partir de imágenes múltiples.
G06T 7/557 · · · a partir de campos de luz, p. ej. de las cámaras plenópticas.
G06T 7/564 · · · a partir de los contornos.
G06T 7/571 · · · a partir del foco.
G06T 7/579 · · · a partir del movimiento.
G06T 7/586 · · · a partir de múltiples fuentes de luz, p. ej. estéreo fotométrico.
G06T 7/593 · · · a partir de imágenes estéreo.
G06T 7/60 · Análisis de los atributos geométricos.
G06T 7/62 · · de la superficie, del perímetro, del diámetro o del volumen.
G06T 7/64 · · de la convexidad o la concavidad.
G06T 7/66 · · de los momentos de imagen o del centro de gravedad.
G06T 7/68 · · de simetría.
G06T 7/70 · Determinación de la posición o la orientación de objetos o cámaras (calibración de cámara G06T 7/80).
G06T 7/73 · · utilizando métodos basados en características.
G06T 7/77 · · utilizando métodos estadísticos.
G06T 7/80 · Análisis de imágenes capturadas para determinar parámetros de cámara intrínsecos o extrínsecos, p. ej. calibración de cámara.
G06T 7/90 · Determinación de las características de color.
CIP2021: Invenciones publicadas en esta sección.
DISPOSITIVO PARA EXTRAER INFORMACIÓN TRIDIMENSIONAL DE IMÁGENES RADIOGRÁFICAS DE UN OBJETO; PROCEDIMIENTO DE CALIBRACIÓN DE DICHO DISPOSITIVO; Y PROCEDIMIENTO PARA GENERAR DICHAS IMÁGENES RADIOGRÁFICAS.
(31/10/2016). Solicitante/s: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC). Inventor/es: ALBIOL COLOMER,Francisco Javier, ALBIOL COLOMER,Alberto, CORBI BELLOT,Alberto, BELLOT ROMERO,Celso.
Dispositivo para extraer información tridimensional de imágenes radiográficas de un objeto; procedimiento de calibración de dicho dispositivo; y procedimiento para generar dichas imágenes radiográficas. El dispositivo comprende: emisor de rayos X ; captador de rayos X ; captador de contorno , para representar puntos del contorno de un objeto, mediante radiación emitida o reflejada por el objeto; marco de calibración con marcadores de rayos X , y marcadores de contorno . Los procedimientos se basan en tomar imágenes de contorno y de rayos X del marco de calibración primero sin y luego con un objeto de estudio , teniendo en cuenta la información proporcionada por los marcadores , y el hecho de que el captador de contorno está dispuesto en relación al emisor de rayos X de la misma manera en todas las imágenes tomadas.
PDF original: ES-2588257_B1.pdf
PDF original: ES-2588257_A1.pdf
Método y dispositivo para medir la distorsión óptica causada por un objeto.
(26/10/2016) Un método para medir la distorsión óptica de un objeto, comprendiendo el método:
mapear una orientación inicial y una posición inicial de cada una de una pluralidad de marcas de referencia con respecto a un punto de referencia, en donde la orientación inicial incluye una ubicación X, Y, Z y una elevación, un azimut y una orientación de balanceo de cada marca de referencia con respecto al origen de un marco de coordenadas de referencia;
cargar la orientación inicial y la posición inicial de cada una de la pluralidad de marcas de referencia en un dispositivo de grabación, en donde cada una de la pluralidad de marcas de referencia es un punto fiducial;
grabar una primera orientación…
DISPOSITIVO PARA EXTRAER INFORMACIÓN TRIDIMENSIONAL DE IMÁGENES RADIOGRÁFICAS DE UN OBJETO; PROCEDIMIENTO DE CALIBRACIÓN DE DICHO DISPOSITIVO; Y PROCEDIMIENTO PARA GENERAR DICHAS IMÁGENES RADIOGRÁFICAS.
(06/10/2016). Solicitante/s: CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS (CSIC). Inventor/es: ALBIOL COLOMER,Francisco Javier, ALBIOL COLOMER,Alberto, CORBI BELLOT,Alberto, BELLOT ROMERO,Celso.
Dispositivo para extraer información tridimensional de imágenes radiográficas de un objeto; procedimiento de calibración de dicho dispositivo; y procedimiento para generar dichas imágenes radiográficas. El dispositivo comprende: emisor de rayos X ; captador de rayos X ; captador de contorno , para representar puntos del contorno de un objeto, mediante radiación emitida o reflejada por el objeto; marco de calibración con marcadores de rayos X , y marcadores de contorno . Los procedimientos se basan en tomar imágenes de contorno y de rayos X del marco de calibración primero sin y luego con un objeto de estudio , teniendo en cuenta la información proporcionada por los marcadores , y el hecho de que el captador de contorno está dispuesto en relación al emisor de rayos X de la misma manera en todas las imágenes tomadas.
Procedimiento para reconocer una estructura aplicada a un sustrato con varias cámaras así como un dispositivo para el mismo.
(28/09/2016) Procedimiento para aplicar y monitorizar automáticamente una estructura que se debe aplicar sobre un sustrato , preferentemente un cordón adhesivo o traza adhesiva
en el que un contorno de referencia se determina en la dirección de avance por medio de por lo menos una primera cámara , en el que se determina, en particular, un canto de componente preferentemente entre dos elementos que se deben unir, para regular el recorrido de la estructura que se debe aplicar según el contorno de referencia , en el que las imágenes registradas por la primera cámara se utilizan para guiar un aparato de aplicación para la estructura que se debe aplicar,
la estructura que se debe aplicar se aplica sobre el sustrato por el aparato de aplicación…
Sistema de control para cables o similar.
(21/09/2016). Solicitante/s: ROLLS-ROYCE MARINE AS. Inventor/es: TORBEN,SVERRE RYE.
Sistema de control de la carga o descarga de un cable o similar sobre un tambor , en el que el tambor presenta un primer eje geométrico de rotación conocido de carga o descarga del cable, el sistema comprende también un medio de formación de imágenes que apunta al cable desde una posición a una cierta distancia del eje geométrico de rotación del tambor, estando el medio de rotación de imágenes adaptado para medir la dirección del cable con respecto al eje geométrico rotacional del tambor, caracterizado porque dicho medio de formación de imágenes está adaptado para proporcinar una imagen en 3D siendo así capaz de ofrecer la dirección del cable en tres dimensiones.
PDF original: ES-2605640_T3.pdf
Procedimiento para medir el área de una muestra dispuesta dentro de una cámara de análisis.
(21/09/2016) Un procedimiento para determinar el área de una cámara de análisis cubierta por una muestra de fluido biológico que reside en reposo dentro de la cámara , cuya cámara tiene un primer panel con una superficie interior , y un segundo panel con una superficie interior , ambos de cuyos paneles son transparentes, comprendiendo el procedimiento las etapas de:
iluminar la muestra que reside dentro de la cámara de análisis con una o más longitudes de onda operables para resaltar las interfaces entre la muestra y el aire, y para resaltar al menos un componente dentro de la muestra ; obtener imágenes de la muestra a lo largo de la una o más longitudes de onda, y producir señales de imagen representativas de la interacción de la una o más longitudes de onda con la muestra…
Sistema para controlar el ajuste de un dispositivo retrovisor lateral.
(14/09/2016) Sistema para controlar el ajuste de un dispositivo retrovisor lateral montado sobre un vehículo , el sistema comprende al menos un dispositivo retrovisor lateral (3, 3'), que funciona para cambiar la zona de visión, en el que el sistema comprende además dos guías de dirección, en el que cada una de las guías de dirección comprende un dispositivo de detección cinético que registra un cambio en la dirección del movimiento del vehículo , y proporciona una señal de salida correspondiente, en el que el sistema comprende, además, una unidad de control que comprende un procesador de datos dispuesto para determinar el ajuste del dispositivo retrovisor (3, 3'), en el que el procesador está adaptado para leer señales de salida del dispositivo de detección y, en base al menos a la salida de los dispositivos de detección y para proporcionar…
Dispositivo de prueba para faros.
(14/09/2016) Dispositivo de prueba para comprobar equipos luminotécnicos de un vehículo de motor con
- una unidad de prueba que, para la colocación delante de al menos un equipo luminotécnico, puede desplazarse a lo largo de un eje de traslación , reproduciéndose la luz irradiada por el equipo luminotécnico por medio de una lente sobre un medio de proyección y generando ahí una reproducción luminosa,
- un medio de detección de datos para detectar datos que son adecuados para determinar un ángulo de alineación α entre el eje de traslación y un eje transversal del vehículo de motor y
- un medio de procesamiento de datos para determinar el ángulo de alineación α por medio de los datos detectados y para corregir la reproducción luminosa basándose en el ángulo…
Método de clasificación de órganos a partir de una imagen tomográfica.
(07/09/2016) Método de clasificación de órganos en una imagen tomográfica recibida a partir de un escáner de resonancia magnética (RM), en donde el método comprende las etapas de:
recibir una imagen objetivo, tomográfica, anatómica y tridimensional que comprende un conjunto de datos de imagen de agua y un conjunto de datos de imagen de grasa, cada uno con una pluralidad de elementos de volumen,
proporcionar una imagen prototipo que comprende un conjunto de datos de imágenes tridimensionales con una pluralidad de elementos de volumen, en donde se da una etiqueta de órgano a un subconjunto de elementos de volumen,
transformar la imagen prototipo aplicando un campo de deformación sobre los elementos de volumen…
Método y aparato para procesar imágenes médicas.
(07/09/2016) Un método implementado por ordenador de procesamiento de imágenes médicas, realizado por un procesador de ordenador y que comprende las etapas de:
a) obtener uno o más atlas, comprendiendo cada atlas una o más imágenes en las cuales una o más características anatómicas se han etiquetado con datos de la etiqueta;
b) obtener una pluralidad de imágenes no etiquetadas;
c) comparar las imágenes etiquetadas y no etiquetadas y seleccionar una o más imágenes no etiquetadas que se asemejan más estrechamente a una o más de las imágenes etiquetadas;
d) propagar, a cada una de estas una o más imágenes seleccionadas, los datos de la etiqueta de una o más de las imágenes etiquetadas más relacionadas, etiquetando de este modo la una o más características anatómicas correspondientes de cada una de la una o más imágenes seleccionadas y hacer que la una…
Procedimiento para determinar puntos correspondientes en mediciones tridimensionales estereoscópicas.
(31/08/2016) Procedimiento para vincular puntos correspondientes medidos por un sistema de visión por ordenador en un conjunto de puntos, comprendiendo dicho procedimiento las etapas de:
calibrar por lo menos dos cámaras (CAM1, CAM2) y un iluminador (LÁSER) utilizado en el sistema ;
determinar la localización y la posición de orientación del objeto ;
iluminar puntos en la superficie del objeto ;
visualizar los puntos iluminados mediante dichas por lo menos dos cámaras (CAM1, CAM2);
vincular los puntos correspondientes visualizados por lo menos por las dos cámaras diferentes;
calcular las coordenadas tridimensionales reales del objeto en base a los puntos correspondientes; y almacenar en memoria las coordenadas ;
caracterizado porque la etapa de…
Procedimiento de determinación de al menos una característica del formato de un fragmento de neumático y procedimiento de examen de una muestra de fragmentos de neumáticos.
(10/08/2016). Solicitante/s: Aliapur. Inventor/es: CLAUZADE, CATHERINE, DE CAZENOVE,ARTHUR.
Procedimiento de determinación, por análisis de imágenes, de al menos una característica del formato de al menos un fragmento de neumático , constando cada fragmento de un cuerpo central compuesto principalmente por caucho, así como diferentes partes filiformes (41-45: 1041-1046) que se extienden a partir de dicho cuerpo central, que están compuestas principalmente por metal o fibras textiles, procedimiento caracterizado porque:
- se identifica la imagen (P) del cuerpo central ;
- se realiza un contorno convexo (C; C') del conjunto de cada fragmento, que envuelve los extremos (4'1-4'5: 104'1- 104'6) de dichas partes filiformes y, eventualmente, ciertos vértices (2'1-2'3) del cuerpo central; y
- se determina la o cada característica (L, S, L/l, S/s) del formato de cada fragmento a partir de al menos la imagen de dicho contorno convexo (C; C').
PDF original: ES-2588944_T3.pdf
Aparato y procedimiento para procesar datos clínicos y bioquímicos e imágenes de ultrasonido tridimensionales para predecir la edad ovárica de una mujer y, equipo de ultrasonido de diagnóstico correspondiente.
(03/08/2016) Aparato para procesar datos clínicos y bioquímicos e imágenes tridimensionales (3D) de ultrasonido para predecir la edad ovárica de la mujer, que comprende:
- al menos un bloque funcional configurado para medir los valores de ultrasonidos transvaginales del volumen ovárico, del recuento de folículos antrales (AFC), del Índice de vascularización (VI), del caudal (FI), del índice de flujo vascular (VFI) de al menos una mujer;
- y al menos un bloque funcional configurado para medir los valores hormonales en sangre de al menos una mujer comprendidos en el grupo constituido por la hormona antimülleriana (AMH), la hormona foliculoestimulante (FSH), estradiol (E2), en mujeres sanas durante un periodo de tiempo comprendido entre el primer y el cuarto día del ciclo menstrual;
siendo las señales de salida de dichos bloques las señales de…
Sistema y procedimiento para facilitar la compresión de imágenes de documento utilizando una máscara.
(03/08/2016) Un componente separador de máscara, que comprende:
un componente de energía de píxel adaptado para calcular la energía de píxel para una región de una imagen de un documento, adaptado además el componente de energía de píxel para calcular una partición de la región basándose al menos en parte en la energía de píxel de al menos uno de entre un primer plano y un plano posterior;
caracterizado porque comprende además:
un componente de fusión de regiones adaptado para fusionar pares de regiones adyacentes de la imagen del documento basándose al menos en parte en la determinación de si las energías de un primer plano y/o un plano posterior de las regiones fusionadas potenciales son menores que…
MÉTODO DE EXTRACCIÓN DEL DISCO ÓPTICO DE UNA IMAGEN DE RETINA.
(28/07/2016). Solicitante/s: Ulma Innovación, S.L. Inventor/es: BERISTAIN IRAOLA,ANDONI, BARANDIARAN MARTIRENA,ÍÑIGO, TAMUREJO COLORADO,NOELIA.
Método de extracción del disco óptico de una imagen de retina, que comprende al menos las siguientes etapas: una etapa de localización aproximada del disco óptico en la que se define un área que comprende al menos parte del disco óptico, y una etapa de segmentación del disco óptico en la que partiendo del área definida en la etapa de localización aproximada se obtiene el contorno de la región que engloba el disco óptico.
Procedimiento para la lectura de la reacción de la tuberculina por toma de imágenes térmicas por infrarrojos.
(12/07/2016). Solicitante/s: FIZ FERNANDEZ,JOSE ANTONIO. Inventor/es: FIZ FERNANDEZ,JOSE ANTONIO.
Procedimiento para la lectura de la reacción de la tuberculina por toma de imágenes térmicas por infrarrojos para la medición del tamaño de una induración cutánea que comprende las siguientes etapas:
- inyección de derivado de proteína purificada de tuberculina (PPD) o sustancia afín en un sujeto,
- toma de primera imagen por infrarrojos de la piel,
- conversión de la primera imagen tomada en una matriz bidimensional escalada a una segunda imagen,
- detección de objeto de referencia,
- obtención pixel central y radio del objeto,
- cálculo de conversión de pixeles a milímetros,
- rechazo pixeles internos del objeto,
- transformación de intensidad de los pixeles de la segunda imagen, obtención de tercera imagen,
- segmentación de tercera imagen en tres regiones según método de crecimiento local,
- cálculo del área, la temperatura máxima, mínima y desviación estándar de regiones y fondo.
PDF original: ES-2577011_B1.pdf
PDF original: ES-2577011_A1.pdf
MÉTODO W SISTEMA DE LOCALIZACIÓN ESPACIAL MEDIANTE MARCADORES LUMINOSOS PARA CUALQUIER AMBIENTE.
(30/06/2016) Método y Sistema de localización espacial de un objetivo en un entorno tridimensional que comprende al menos un marcador luminoso comprendiendo: - una cámara estéreo para capturar una primera trama de imagen en un instante actual y una segunda trama de imagen en un instante anterior; - un dispositivo de medida de ángulos para obtener un ángulo de giro del objetivo ; - un procesador de señales con acceso a una memoria que almacena entre otros un radio del, al menos un; marcador detectado en un instante de tiempo actual n y en un instante de tiempo anterior n~ 1 configurado para calcular unas coordenadas {x-., y) del objetivo en un instante de tiempo i como sigue: - si el ángulo de giro en el instante de tiempo actual y en el instante de tiempo anterior son distintos, (Xn, Yn…
SISTEMA DE VISIÓN ARTIFICIAL Y PROCEDIMIENTO PARA LA DETECCIÓN DE OBJETOS ANÓMALOS (PEATONES O ANIMALES) EN AUTOVÍAS O AUTOPISTAS.
(30/06/2016). Solicitante/s: UNIVERSIDAD DE MALAGA. Inventor/es: LÓPEZ RUBIO,Ezequiel, LUQUE BAENA,Rafael Marcos, PALOMO FERRER,Esteban José.
Sistema de visión artificial y procedimiento para la detección de objetos anómalos (peatones o animales) en autovías o autopistas. La invención refiere un sistema que comprende una cámara digital que suministra imágenes a una CPU que implementa un detector de objetos en movimiento que envía la información de los objetos presentes en cada fotograma a un módulo de seguimiento de objetos que identifica las trayectorias y velocidades de los objetos presentes en cada fotograma y que suministra dicha información a un detector de anomalías que clasifica los objetos en normales y anómalos y que, alternativamente, envía la información de objetos anómalos a un módulo de comunicaciones que permite informar sobre dichos objetos. La invención refiere asimismo un procedimiento para la detección de dichos objetos anómalos que comprende las etapas de captación de imágenes, detección de objetos, seguimiento de objetos y detección de objetos anómalos.
Método para cuantificar el grado de regularidad morfológica de la zona pelúcida en embriones y ovocitos.
(29/06/2016) Método para calcular un factor de forma indicativo de la uniformidad del espesor de la zona pelúcida de una estructura biológica, que comprende las siguientes etapas:
- adquirir una imagen digital que comprende dicha zona pelúcida;
- reconocer un borde exterior (a) y un borde interior (b) de dicha zona pelúcida, siendo dicho borde exterior y dicho borde interior, de forma respectiva, un borde distal y un borde proximal de dicha zona pelúcida con respecto a dicha estructura;
caracterizado por que este también comprende las siguientes etapas:
- extraer unos primeros puntos de dicho borde exterior,
- interpolar dichos primeros puntos determinando un polígono exterior A,
- extraer unos segundos puntos de dicho borde interior,
- interpolar dichos segundos…
Aparato y procedimiento para rastreo ocular/de mirada robusto.
(29/06/2016) Un aparato de rastreo ocular/de mirada, que comprende:
al menos una unidad de registro de imagen (110, 111, 112, 11n) configurada para grabar al menos una serie de imágenes (DIMG, DIMG1, DIMG2, DIMGn) que representa un sujeto,
una unidad de control configurada para controlar una secuencia de operaciones para al menos una unidad de registro de imagen (110, 111, 112, 11n), y
una unidad de procesamiento de datos configurada para recibir al menos una serie de imágenes (DIMG, DIMG1, DIMG2, DIMGn) procedente de al menos una unidad de registro de imagen (110, 111, 112, 11n), y basándose en ello, producir datos de rastreo ocular/de mirada (DE/G)) con respecto al sujeto, caracterizado porque
la unidad de control está configurada para controlar la secuencia de operaciones para al menos una unidad de…
MICROSCOPIO Y PROCEDIMIENTO PARA LA GENERACIÓN DE IMÁGENES 3D DE UNA COLECCIÓN DE MUESTRAS.
(28/04/2016). Solicitante/s: UNIVERSIDAD CARLOS III DE MADRID. Inventor/es: RIPOLL LORENZO,Jorge, ARRANZ DE MIGUEL,Alicia.
La invención describe un microscopio y procedimiento para obtener imágenes 3D de varias muestras transparentes o semi-transparentes que comprende fundamentalmente: provocar, manteniendo un ángulo de adquisición constante, un desplazamiento relativo según la dirección de detección entre la lámina de iluminación y la muestra; obtener, para dicho ángulo de adquisición, una única imagen de proyección en 2D formada por un parámetro representativo para cada píxel; modificar el ángulo de adquisición mediante un giro relativo entre la lámina de iluminación y la muestra combinado con una traslación vertical relativa entre la lámina de iluminación y la muestra, y repetir los pasos anteriores; y generar, a partir del conjunto de imágenes de proyección en 2D obtenidas, una imagen 3D de cada una de las muestras.
Procedimiento de determinación de un plano del suelo a partir de una imagen de profundidad.
(27/04/2016) Procedimiento de determinación de un triplete de parámetros que definen un plano del suelo en una referencia tridimensional a partir de una imagen de profundidad tomada en una secuencia de imágenes, caracterizado porque comprende:
• una etapa de selección de puntos válidos en la imagen de profundidad en curso, siendo los puntos válidos los puntos de la imagen cuya distancia a un punto de origen de la referencia tridimensional está comprendida entre una distancia mínima predeterminada y una distancia máxima predeterminada,
• una etapa de determinación de un indicador R3d para la imagen de profundidad en curso, siendo dicho indicador función del número de puntos válidos en la imagen de profundidad en curso y del número total de puntos en esta imagen,
…
Instalaciones para pintura de objetos.
(20/04/2016) Un aparato para pintar un objeto , en particular, una parte de carrocería de automóvil, comprendiendo dicho aparato:
- un cabezal de pintura provisto de al menos una boquilla de pulverización dispuesta para proporcionar un flujo de pintura de un color predeterminado sobre una superficie de dicho objeto ;
- un medio de desplazamiento para desplazar dicho cabezal de pintura en un espacio de trabajo, teniendo dicho medio de desplazamiento al menos dos grados de libertad;
caracterizado por cuanto que comprende, además:
- un dispositivo de identificación para identificar la forma tridimensional de dicha superficie de dicho objeto, siendo dicho dispositivo…
MÉTODO PARA POSICIONAR DISPOSITIVOS EN RELACIÓN A UNA SUPERFICIE.
(12/04/2016). Solicitante/s: UNIVERSIDAD AUTONOMA DE MADRID. Inventor/es: ASENSIO PIZARRO,Carlos, NEDELTCHEV KOROUTCHEV,Kostadin.
Método para posicionar dispositivos en relación a una superficie.
Método que permite caracterizar superficies en función de distintos puntos presentes en la misma de manera que no es necesario marcar la superficie para poder trabajar sobre la misma con herramientas automatizadas ya que la superficie a trabajar se encuentra mapeada y marcada artificialmente de manera que se puede guiar un equipo de trabajo sobre la superficie sin necesidad de elementos auxiliares. El método aquí descrito se basa en un barrido previo de la superficie de manera que se genera una imagen de la misma, o varias, a partir de las cuales y previo procesado de las mismas se obtiene un mapeado preciso que permite tener caracterizada la superficie y con el conocimiento de la misma para poder realizar cualquier trabajo que precisa el conocimiento de la posición sobre la misma sin necesidad de manipularla.
PDF original: ES-2566427_B1.pdf
PDF original: ES-2566427_A1.pdf
Procedimiento para la creación de una imagen virtual de la mandíbula.
(30/03/2016) Método para la generación de una imagen volumétrica virtual de la mandíbula que incluye la disposición de los elementos articulares de la articulación temporomandibular, teniendo en cuenta que una imagen volumétrica digital del maxilar inferior se puede mostrar en distintas posiciones con respecto a una imagen volumétrica digital del maxilar superior. Dicho método se divide en los siguientes pasos:
realización de un proceso de registro del movimiento, más concretamente una técnica de condilografía, para la obtención de un registro de movimiento, más concretamente una condilografía, en la que se genera una gran cantidad de conjuntos de datos posicionales ((t1, x1, y1, z1, rx1, ry1, rz1), (t2, x2, y2, z2, rx2, ry2, rz2), ...) a lo largo de un periodo de tiempo definido y en la que un conjunto de datos…
Procedimiento para el apoyo de la navegación inercial de un aparato volador.
(30/03/2016) Procedimiento para el apoyo de la navegación inercial de un aparato volador (FK) con un sistema de navegación inercial (INS) que presenta una unidad de medición de la inercia (IMU) y con una cámara que mira hacia delante para la captación continua de una serie de imágenes de un escenario sobrevolado por el aparato volador (FK), proporcionando la serie de imágenes captadas de forma continua datos para una comparación de los datos, que apoya la navegación inercial, con los datos de referencia archivados en el aparato volador (FK), captando la cámara imágenes desde distintas perspectivas del escenario sobrevolado y caracterizándose la posición y la situación de la cámara respecto a un sistema de coordenadas en el momento de una primera toma en la posición 1 por medio de una matriz de rotación y de un vector de traslación, y caracterizándose…
Cuantificación reproducible de expresión de biomarcadores.
(23/03/2016) Método para cuantificar reproductivamente la expresión de biomarcadores en una muestra de tejido montada en una diapositiva que comprende:
(a) obtención de una muestra de tejido montada en una diapositiva, que se ha manchado para permitir la localización de al menos un compartimento celular y al menos un biomarcador;
(b) obtención de una o más imágenes formadas por píxeles de la muestra de tejido manchada utilizando un sistema óptico estandarizado, y análisis de una o más imágenes formadas por píxeles para obtener uno o más conjuntos de datos;
(c) análisis automático de uno o más conjuntos de datos derivados a partir de…
Dispositivo de evaluación de imagen, dispositivo de selección de imagen, procedimiento de evaluación de imagen, medio de almacenamiento, y programa.
(23/03/2016). Ver ilustración. Solicitante/s: RAKUTEN, INC. Inventor/es: HIRANO,HIROMI.
Un dispositivo de evaluación de imagen, que comprende:
un desenfocador que crea una segunda imagen mediante el desenfocado de una primera imagen;
un diferenciador que crea una tercera imagen que presenta una diferencia en valor de píxel de cada píxel entre la primera imagen y la segunda imagen;
un escáner que escanea píxeles contenidos en la tercera imagen, obteniendo diferencias en valor de píxel entre píxeles adyacentes, y obteniendo probabilidades respectivas de ocurrencia de las diferencias obtenidas;
un calculador que calcula una entropía a partir de las respectivas probabilidades de ocurrencia de las diferencias obtenidas; y
un emisor que emite la entropía como un valor de evaluación de una granulosidad de la primera imagen.
PDF original: ES-2575009_T3.pdf
MÉTODO PARA POSICIONAR DISPOSITIVOS EN RELACIÓN A UNA SUPERFICIE.
(17/03/2016). Solicitante/s: UNIVERSIDAD AUTONOMA DE MADRID. Inventor/es: ASENSIO PIZARRO,Carlos, NEDELTCHEV KOROUTCHEV,Kostadin.
Método que permite caracterizar superficies en función de distintos puntos presentes en la misma de manera que no es necesario marcar la superficie para poder trabajar sobre la misma con herramientas automatizadas ya que la superficie a trabajar se encuentra mapeada y marcada artificialmente de manera que se puede guiar un equipo de trabajo sobre la superficie sin necesidad de elementos auxiliares. El método aquí descrito se basa en un barrido previo de la superficie de manera que se genera una imagen de la misma, o varias, a partir de las cuales y previo procesado de las mismas se obtiene un mapeado preciso que permite tener caracterizada la superficie y con el conocimiento de la misma para poder realizar cualquier trabajo que precisa el conocimiento de la posición sobre la misma sin necesidad de manipularla.
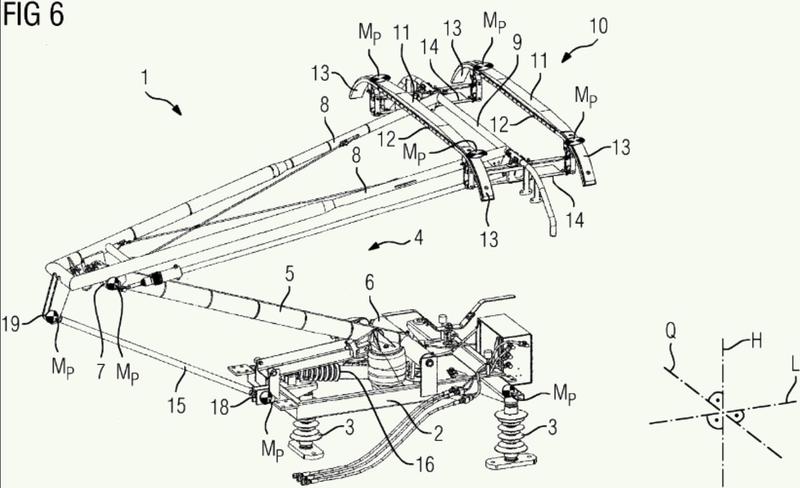
Sistema para detectar el estado de un colector de corriente.
(16/03/2016). Ver ilustración. Solicitante/s: SIEMENS AKTIENGESELLSCHAFT. Inventor/es: VOSS, FRANK, BAHLMANN,CLAUS, GERSTENBERG,FRANK, KLIER,CHRISTIAN.
Sistema para detectar un estado de un colector de corriente de un vehículo de propulsión eléctrica, que comprende una instalación de videocámara para la toma digital de imágenes del colector de corriente y una instalación de valoración de imágenes para la valoración técnica de los datos de las tomas de imágenes, en donde el colector de corriente presenta unas marcas (MP, MF, MS, MC, MB) ópticamente detectables, cuya posición y/o forma y/o contenido superficial y/o color pueden detectarse automáticamente mediante la instalación de valoración de imágenes, caracterizado porque una pletina de rozamiento del colector de corriente presenta una marca (MP, MF, MS, MC,) que se extiende en la dirección de desgaste (V), cuya posición y/o forma y/o contenido superficial y/o color varían conforme aumenta el desgaste.
PDF original: ES-2638816_T3.pdf
Dispositivo y método para el control automático de asas de bolsas de plástico.
(09/03/2016) Dispositivo de control automático para las asas (B) de bolsas de plástico dispuestas en pilas (M) que comprende
al menos una cámara de vídeo adaptada para capturar la imagen de al menos una de dichas pilas (M) de bolsas, y
medios de procesamiento adaptados para procesar los píxeles de la imagen capturada por la al menos una cámara de vídeo para obtener una reproducción geométrica fiel de la pila;
caracterizado porque:
- la al menos una cámara de vídeo está adaptada para capturar la imagen de dicha al menos una pila (M) de bolsas en la posición de las asas;
- los medios de procesamiento están adaptados para reconstruir el contorno de las asas (B) para medir la anchura (W) de las asas (B) y para evaluar si la anchura (W) medida de las asas (B) está dentro de un intervalo de tolerancia previamente establecido,
…
Método para fabricar una varilla para su uso como un sustrato formador de aerosol que tiene una distribución de porosidad controlada.
(18/02/2016) Un método para fabricar varillas formadoras de aerosol que tienen valores de porosidad en la sección transversal y de distribución de la porosidad en la sección transversal predeterminados para su uso como sustratos formadores de aerosol en artículos generadores de aerosol calentados , el método comprende las etapas de:
proporcionar una lámina continua de material formador de aerosol que tiene un ancho específico y un grosor específico,
fruncir la lámina continua de material formador de aerosol transversalmente con relación al eje longitudinal de la misma,
circunscribir la lámina fruncida continua de material formador de aerosol con una envoltura para formar una varilla continua,
cortar la varilla continua en una pluralidad de varillas separadas,
determinar valores representativos de la porosidad…
{kind=link}
{kind=link}