Aparato de mano y procedimiento para controlar y/o programar un manipulador.
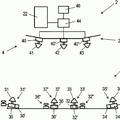
Aparato de mano (1) portátil para controlar y/o programar un manipulador,
especialmente un robot, con un dispositivo de manipulación (2, 3) para la manipulación del aparato de mano por un usuario;
un elemento palpador (5) en el que está definido un punto de referencia (R);
un dispositivo de registro de posición (4), unido al elemento palpador, especialmente de forma separable, para registrar una posición (x, y, z, α, β, γ) del punto de referencia;
caracterizado por que
el dispositivo de manipulación (2, 3) y el dispositivo de registro de posición (4) están unidos entre sí de forma articulada, y
el aparato de mano presenta un dispositivo de registro de fuerza (10) para registrar una fuerza de reacción (F) que actúa sobre el elemento palpador.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2011/001907.
Solicitante: KUKA ROBOTER GMBH.
Nacionalidad solicitante: Alemania.
Dirección: ZUGSPITZSTRASSE 140 86165 AUGSBURG ALEMANIA.
Inventor/es: SEDLMAYR,ANDREAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J9/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
- G01S5/16 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › que utilizan ondas electromagnéticas que no sean ondas de radio.
PDF original: ES-2580833_T3.pdf
Patentes similares o relacionadas:
 Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Sistema de detección de localización de fuente de luz, del 6 de Mayo de 2020, de Thales Defense & Security, Inc: Un sistema para rastrear una orientación de un primer objeto , comprendiendo el sistema: un dispositivo de emisión de luz situado con respecto […]
Procedimiento y dispositivo para determinar la distancia entre un receptor aéreo y un emisor terrestre fijo, del 19 de Junio de 2019, de MBDA FRANCE: Procedimiento para la determinación continua de la distancia entre un receptor aéreo (R) móvil de manera conocida en una trayectoria conocida (T) y un […]
SISTEMA INFO-OPTICO PARA LA MONITORIZACIÓN DEL MOVIMIENTO DE ROEDORES DE LABORATORIO, del 10 de Enero de 2019, de UNIVERSIDAD DE MURCIA: Sistema info-óptico para la monitorización del movimiento de roedores de laboratorio. La presente invención consiste en un sistema info-óptico diseñado […]
SISTEMA DE POSICIONAMIENTO, del 10 de Enero de 2019, de IBAÑEZ CRUZ, Javier: Especialmente concebido para espacios cubiertos de grandes dimensiones, está constituido a partir de una serie de módulos espaciales estáticos convenientemente […]
 Sistema de navegación de campo próximo, del 31 de Octubre de 2018, de Airbus Defence and Space GmbH: Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
[…]
Sistema de navegación de campo próximo, del 31 de Octubre de 2018, de Airbus Defence and Space GmbH: Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto, navegando el primer objeto en relación con el segundo objeto,
[…]
 Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
SISTEMA INTERIOR DE LOCALIZACION EN ENTORNOS METÁLICOS., del 27 de Junio de 2018, de SKYLIFE ENGINEERING, S.L: Sistema interior de localización en entornos metálicos basado en un sistema de posicionamiento destinado a entornos donde la recepción de señales […]