Dispositivo para medir la posición de la punta de una herramienta o elemento de máquina y método de aplicación.
Dispositivo para medir la posición de la punta de una herramienta o elemento de máquina y método de aplicación;
el dispositivo mide la posición de la punta de una herramienta o un útil de una máquina, en especial de una máquina-herramienta, caracterizado por la incorporación de sensores que realizan la medida simultánea y continua de fuerzas y para obtener la magnitud exacta del descentramiento de la punta de una herramienta de manera que se posibilita el control en línea con precisión de la posición exacta de la punta o útil.
Para ello se realiza el montaje colineal respecto a su eje de todos los componentes sobre una base de fijación y una plataforma superior ensamblados colinealmente. El dispositivo de soporte está unido al dispositivo de captura y procesamiento de datos para calcular la posición de la punta de la herramienta o útil de máquinas sobre la base de que el objeto, al desplazarse sobre la superficie plana, produce una fuerza cuyas proyecciones en el plano perpendicular al eje del dispositivo están relacionadas con la posición exacta de la herramienta.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201331600.
Solicitante: UNIVERSIDAD POLITECNICA DE MADRID.
Nacionalidad solicitante: España.
Inventor/es: VIZAN IDOIPE, ANTONIO, HERNANDEZ MATIAS,JUAN CARLOS, PÉREZ GARCÍA,Hilde, DÍEZ CIFUENTES,Eduardo.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q17/22 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 17/00 Dispositivos para indicar o medir sobre las máquinas herramientas (para el control automático o la regulación del movimiento de avance, de la velocidad de corte o de la posición de la herramienta o de la pieza B23Q 15/00). › para indicar o medir la posición existente o deseada de la herramienta o la pieza de trabajo.
- G01L5/16 FISICA. › G01 METROLOGIA; ENSAYOS. › G01L MEDIDA DE FUERZAS, TENSIONES, PARES, TRABAJO, POTENCIA MECANICA, RENDIMIENTO MECANICO O DE LA PRESION DE LOS FLUIDOS (pesado G01G). › G01L 5/00 Aparatos o métodos para la medida de fuerzas, del trabajo, de la potencia mecánica o del par, especialmente adaptados a fines específicos. › para la medida de varios componentes de la fuerza.

Fragmento de la descripción:
Dispositivo para medir la posición de la punta de una herramienta o elemento de máquina y método de aplicación.
Sector técnico
La invención se circunscribe al campo de la Tecnología Mecánica relacionado con la máquina-herramienta y más concretamente con dispositivos y métodos de medida y control de dispositivos y procesos.
Estado de la técnica
En los procesos de fabricación realizados con máquina-herramienta es necesario medir la posición de la punta de algunas herramientas y también de elementos que puedan montarse sobre las mismas con el objeto de detectar cualquier cambio en la geometría que pueda tener efectos negativos en la calidad del proceso.
Un ejemplo de este tipo de mediciones es la medida de la posición de la punta de una herramienta para definir geométricamente el descentramiento que se tiene en el extremo de la herramienta o útil para máquina. Esta medición es especialmente importante en herramientas de filo único para procesos de micromecanizado en los que cualquier descentramiento de la posición de la punta de la herramienta, dadas las magnitudes dimensionales de trabajo, provocará errores de mecanizado o impedirá la realización correcta del proceso.
La medida de la posición de punta de herramienta o elementos de máquina se realiza mediante instrumentos metrólogicos dimensionales montados expresamente para la máquina. Esto instrumentos funcionan de manera externa, es decir, que es necesario parar la máquina y proceder a un proceso de medida off-line del proceso. Como consecuencia este proceso es muy laborioso y no permite tener en cuenta los errores propios de la máquina.
En el estado actual de la técnica, la medida de la punta de herramienta u otros elementos que pueden montarse sobre la máquina se realiza normalmente de forma óptica con
precisión variable según el instrumento de medida usado. Los sistemas de reglaje de herramienta por palpación permiten conocer las longitudes de las herramientas pero no la posición relativa de la punta de la herramienta respecto de su eje o de un elemento de referencia.
Dentro de las otras soluciones técnicas conocidas relacionadas con la medida de la posición de herramientas se encuentra el documento ES2371712T3 que describe un dispositivo para controlar la posición de una herramienta o un elemento de máquina en donde el husillo de trabajo o el dispositivo de sujeción de herramienta presenta un canal que define una guía de ondas adecuada para la propagación de ondas electromagnéticas que junto a un sistema radar determina una medida para la posición de la herramienta. También el documento DE19959778A1 instruye sobre el uso de un sistema de telemetría con sistema sensor de medición de distancia para el control simultáneo del estado de sujeción y del contacto plano del alojamiento de herramienta en el husillo.
Sin embargo en ambos casos el sistema no accede directamente a la punta de la herramienta y por tanto puede cometer errores de precisión asociados al desgaste de los elementos mecánicos que lo constituyen.
En comparación con los sistemas actuales de tipo conocido, la invención permite calcular con precisión la posición de la punta a partir del procesamiento en línea de las señales de sensores de par y fuerza. En el sistema propuesto no es necesario proceder a parar la máquina puesto que la medición puede programarse al inicio del proceso de mecanizado.
Descripción de la invención
El objetivo de la invención es crear una solución novedosa que permita dotar a la máquina- herramienta de un dispositivo "en línea" de medida de la punta de herramienta que permita la corrección de la posición de la misma con el fin de generar una superficie con la precisión.
Este objetivo se consigue según la invención mediante un dispositivo con las características de la reivindicación 1 y un método según la reivindicación 3. En las reivindicaciones dependientes se definen realizaciones preferidas de la invención.
La invención prevé un dispositivo y método de aplicación para determinar la posición de la punta de una herramienta o un útil de una máquina, en especial de una máquina- herramienta, respecto de su eje o de otro elemento geométrico definido en un lugar cualquiera.
La medida de la punta de la herramienta se realiza con un dispositivo sobre el que se monta un elemento testigo que incorpora un sensor de par y un sensor de fuerza bidireccional, para la medida de valores positivos y negativos de las fuerzas F en las direcciones X e Y.
Con estos sensores se realiza la captación simultánea y continua de los valores de fuerzas y par de manera que se ha verificado que es posible obtener la medida del descentramiento de la punta de una herramienta o de un útil a partir de dichos valores de fuerza y par. La determinación de la posición dimensional de la punta de una herramienta o útil de máquina de interés respecto de su eje de otro eje geométrico definido en un lugar cualquiera, permite definir geométricamente el descentramiento que se tiene en el extremo de la herramienta o elemento de máquina con precisión adecuada.
Para ello se realiza el montaje concéntrico de todos los componentes sobre una base de fijación y una plataforma superior ensamblados colinealmente respecto a su eje. El dispositivo de soporte está unido un dispositivo de captura y procesamiento de datos para calcular la posición de la punta de la herramienta o útil de máquinas sobre la base de que el objeto, al desplazarse sobre la superficie plana, produce una fuerza cuyas proyecciones en el plano perpendicular al eje del dispositivo están relacionadas con la posición de la herramienta.
Los sensores utilizados pueden ser de cualquier tecnología de instrumentación electrónica usada en máquina-herramienta como sensores piezoeléctricos, extensiométricos, piezoresistivos o mecánicos. Estos sensores se montan sobre un mismo cuerpo del dispositivo con objeto de captar simultáneamente el par y la fuerza longitudinal Fx y fuerza transversal Fy medidas en las direcciones perpendiculares al eje de medida del par Z.
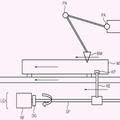
El elemento testigo se utiliza como superficie para que la punta de la herramienta o elemento a medir realicen sobre ella un desplazamiento superficial en cuyo contacto se producen fuerzas y par. Se ha descubierto que la punta del objeto a medir, al desplazarse
sobre la superficie plana, produce una fuerza cuyas proyecciones en el plano perpendicular al eje del dispositivo están relacionadas con la posición de la punta. De esta forma, el conocimiento de las fuerzas Fx y Fy y par que se producen durante el roce de la punta sobre el elemento testigo permite conocer el descentramiento existente entre la punta y su eje determinando así la posición de la punta de herramienta o útil para máquina.
El objeto a medir se desplaza en contacto con una plataforma a lo largo de un desplazamiento de valor conocido. La medida continúa del par y de las fuerzas mientras se produce este desplazamiento permite determinar, mediante cálculos específicos, la posición relativa de la punta del objeto respecto del eje del dispositivo. Este cálculo se realiza sobre la base de que el objeto, al desplazarse sobre la superficie plana, produce una fuerza cuyas proyecciones en el plano perpendicular al eje del dispositivo son medidas por los sensores de fuerza.
Se ha verificado que las fuerzas Fx y Fy dan lugar a un par diferente en cada punto de la trayectoria. La componente colineal con la trayectoria no dará lugar a ningún par si el extremo de la herramienta o del útil está centrado con el eje de la herramienta o útil. De esta forma los valores en la entrada y salida del elemento testigo son iguales.
Cuando la punta de la herramienta o útil está descentrada respecto de su eje, se produce un par de la fuerza colineal con la dirección del desplazamiento que es constante, tanto si la herramienta se está acercando al eje como cuando se aleja de él.
Esta componente del par da lugar a que la evolución del par total no sea simétrica respecto del eje del dispositivo. El eje del dispositivo se localiza en el registro temporal del par y de las fuerzas en la mitad del tiempo del intervalo de contacto de la herramienta o útil con el elemento testigo. La fijación del intervalo de tiempo se establece analizando las señales medidas y cuando éstas han sobrepasado un umbral determinado.
El par (P) en cada punto de la trayectoria será:
P= Fx x + Fy d
Siendo x la distancia entre la punta de la herramienta o útil y el eje del dispositivo y d el descentramiento o desviación de esta punta respecto del eje de la herramienta o útil.
De esta forma, se verifica que en todo momento la desviación de la punta...
Reivindicaciones:
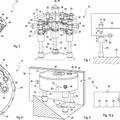
1. Dispositivo (1) para medir la posición de la punta de una herramienta o elemento de máquina, caracterizado por comprender colocados colinealmente respecto a su eje los siguientes elementos:
- una base metálica (2) para su fijación a la máquina-herramienta;
- una plataforma superior (5) caracterizada porque permite incorporar un elemento testigo (6) a través de un sistema de fijación (7);
- un sensor de fuerza bidireccional (3);
- un sensor de par (4);
- un elemento centrador (11).
2. Dispositivo (1) según reivindicación 1 caracterizado porque el elemento centrador esta montado entre el sensor de fuerza bidireccional (3) y el sensor de par (4).
3. Método de determinación de la posición dimensional de la punta de una herramienta o de un útil de una máquina, utilizando el dispositivo descrito en las reivindicaciones anteriores caracterizado por comprender las siguientes fases:
- el dispositivo se monta sobre cualquier superficie plana de la máquina-herramienta a la que la punta de la herramienta o útil a medir tenga acceso libre;
- se conectan el conector del sensor de fuerza (9) y el conector del sensor del par (10) con un sistema de procesamiento y captura de datos;
- se hace desplazar la punta de la herramienta en contacto con la superficie del elemento testigo (6);
- se determina la posición dimensional;
- se realiza el reglaje y posicionamiento correcto de la herramienta.
4. Método descrito en la reivindicación 3 caracterizado porque la posición dimensional comprende las siguientes fases:
- la herramienta o útil a medir se desplaza sobre el elemento testigo (6);
- se miden simultáneamente las fuerzas longitudinales, transversales y el par que se produce en la punta de la herramienta o útil;
- a partir del valor de la fuerza transversal medida se obtiene el par transversal;
- la diferencia del par medido con respecto al par transversal permite obtener el par producido por el descentramiento de herramienta;
- dividendo el par resultante del descentramiento por el valor de la fuerza longitudinal se obtiene el valor de descentramiento de la punta de herramienta o el útil.
Patentes similares o relacionadas:
 Dispositivo de alineación para herramientas de torneado, del 29 de Julio de 2020, de GÜHRING KG: Dispositivo de alineación para disponer sobre una herramienta de torneado, , en particular sobre un vástago de herramienta o una punta […]
Dispositivo de alineación para herramientas de torneado, del 29 de Julio de 2020, de GÜHRING KG: Dispositivo de alineación para disponer sobre una herramienta de torneado, , en particular sobre un vástago de herramienta o una punta […]
Dispositivo de mandril y método, del 18 de Marzo de 2020, de In-Situ Oilfield Services Limited: Un dispositivo de mandril que tiene al menos dos mandíbulas para agarrar un objeto (T), y un mecanismo de ajuste configurado para ajustar el centro rotacional […]
Procedimiento para el mecanizado de los bordes de piezas de trabajo en forma de placa, del 19 de Febrero de 2020, de IMA Schelling Deutschland GmbH: Procedimiento para el mecanizado de los bordes de piezas de trabajo en forma de placa, donde las piezas de trabajo se suministran en un circuito […]
Aparato seguidor del contorno y sistemas y métodos relacionados, del 1 de Enero de 2020, de FLOW INTERNATIONAL CORPORATION: Un conjunto de cardan para una máquina multieje para ayudar al mantenimiento de una relación espacial entre una herramienta de la máquina multieje y una […]
Accesorio de centrado de útiles sobre una máquina de mecanizado, procedimiento de centrado y dispositivo de ayuda para el centrado que incluye tal accesorio, del 20 de Noviembre de 2019, de Wibemo S.A: Accesorio de centrado de un útil (O) o de un husillo porta-útiles sobre un eje de rotación X-X` de un cañón giratorio de una máquina de mecanizado, caracterizado […]
Módulo de mecanización, conjunto de accesorio para módulo de mecanización, y procedimiento de puesta en marcha de un módulo de mecanización, del 9 de Octubre de 2019, de Watch Out SA: Conjunto de accesorios para módulo de mecanización por arrancado de virutas, que comprende: por lo menos un portaherramientas provisto de una […]
Procedimiento y dispositivo para detectar y corregir una ubicación espacial de una pieza de trabajo sostenida en un dispositivo de posicionamiento, del 4 de Septiembre de 2019, de JENOPTIK AUTOMATISIERUNGSTECHNIK GMBH: Procedimiento para detectar y corregir una ubicación espacial de una pieza de trabajo no simétrica en rotación sostenida en un dispositivo de posicionamiento […]
 Dispositivo y procedimiento para la sincronización del movimiento de un medio de mecanizado automático con el movimiento de una pieza de trabajo, del 31 de Julio de 2019, de SIEMENS AKTIENGESELLSCHAFT: Dispositivo para la sincronización del movimiento de un medio de mecanizado automático (BM) con el movimiento de una pieza de trabajo (WS) transportada durante el mecanizado […]
Dispositivo y procedimiento para la sincronización del movimiento de un medio de mecanizado automático con el movimiento de una pieza de trabajo, del 31 de Julio de 2019, de SIEMENS AKTIENGESELLSCHAFT: Dispositivo para la sincronización del movimiento de un medio de mecanizado automático (BM) con el movimiento de una pieza de trabajo (WS) transportada durante el mecanizado […]