Procedimiento y máquina de embalaje por robot de una carga paletizada por medio de una funda de plástico blando.
Procedimiento de conformación y colocación de una funda (12) de embalaje sobre una carga (CH) paletizada,
estando dicha funda preparada a partir de una envoltura de plástico blando enrollada sobre al menos una bobina de almacenamiento (17, 18), procedimiento que consiste en:
- almacenar en un dispositivo de transferencia y acumulación (DTA) una longitud predeterminada de envoltura para constituir una funda (12) cerrada en un extremo,
- volver a coger el extremo abierto opuesto y descender la funda (12) alrededor de la carga (CH) que se va a embalar, manteniéndola abierta por sus cuatro ángulos;
caracterizado por las etapas intermedias siguientes:
- determinar la posición del eje transversal mediano (a1) de la carga (CH) con respecto al eje de conducción (a3) de la envoltura,
- y desplazar el dispositivo de transferencia y acumulación (DTA) de la funda (12) por encima de la carga (CH), sincronizando el mando de posicionamiento de dicho dispositivo de transferencia y acumulación (DTA) con los datos de la posición de la carga (CH).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FR2011/000612.
Solicitante: THIMON.
Nacionalidad solicitante: Francia.
Dirección: Savoie Hexapôle Rue Louis Armand 73420 Méry FRANCIA.
Inventor/es: JACONELLI,JEAN-CHRISTOPHE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65B5/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › Embalaje de objetos individuales en receptáculo o recipientes, p. ej. sacos, bolsas, cajas, cartones, latas, tarros.
- B65B9/13 B65B […] › B65B 9/00 Encerrado sucesivo de objetos, de cantidades de materiales, p. ej. líquidos o semilíquidos, en bandas planas, plegadas o tubulares, hechas de hojas de materia flexible; División de los tubos flexibles llenados para formar paquetes. › siendo suministradas las bandas tubulares preformadas en forma aplanada.
PDF original: ES-2527818_T3.pdf
Fragmento de la descripción:
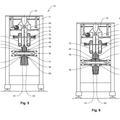
Procedimiento y máquina de embalaje por robot de una carga paletizada por medio de una funda de plástico blando.
La invención se refiere a un procedimiento y un dispositivo de conformación y colocación de una funda de embalaje sobre una carga paletizada, siendo preparada dicha funda a partir de una envoltura de plástico blando enrollada sobre al menos una bobina de almacenamiento, procedimiento que consiste en:
- almacenar en un dispositivo de transferencia y acumulación una longitud predeterminada de envoltura para
constituir una funda cerrada en un extremo,
- volver a coger el extremo abierto opuesto y bajar la funda alrededor de la carga que se va a embalar,
manteniéndola separada por sus cuatro ángulos.
Estado de la técnica
La mayoría de las máquinas conocidas poseen un dispositivo de apertura de la envoltura colocado, durante la operación de enfundado, por encima de la carga que se va a embalar, siendo esta introducida según un ciclo secuencial automatizado en la máquina por medio de un transportador de rodillos o de cadenas y posicionada con precisión bajo el dispositivo de apertura de la envoltura.
En estas máquinas, una bobina de almacenamiento de la envoltura está colocada no lejos del suelo y su eje se extiende paralelamente o según otro ángulo al transportador de transferencia de la carga que se va a embalar.
En la versión en la que la bobina está paralela al transportador, la envoltura desenrollada sube verticalmente a lo 25 largo de la máquina para posicionar su extremo abierto por encima de la carga que se va a embalar.
En la versión en la que el eje de la bobina está posicionado según otro ángulo no paralelo al transportador, la envoltura desenrollada pasa por un dispositivo de reenvío de ángulo, antes o después de ser subida verticalmente a lo largo de la máquina para posicionar su apertura por encima de la carga que se va a embalar. En estos dos casos, el eje transversal de conducción de la envoltura se confunde con el eje transversal del dispositivo de transferencia y acumulación y el eje transversal de la carga y es fijo independientemente de las cargas.
Los documentos EP1060988 y EP1574433B1 describen cada uno un dispositivo de sobreembalaje de una carga paletizada por medio de una funda preparada a partir de una envoltura con fuelles enrollada plana sobre una bobina 35 de almacenamiento. Un robot de prensión consta de un sistema de acumulación en el cual se acumula una parte de la envoltura, un brazo de transferencia del rodillo hacia el puesto de enfundado y un mecanismo de separación de la funda durante el movimiento de descenso alrededor de la carga. La envoltura previamente soldada en sentido transversal, se mantiene en posición vertical con los fuelles solicitados en apertura por un órgano posicionador. El brazo del robot está impulsado al menos por un movimiento horizontal de traslación hacia el puesto de enfundado que se ejecuta perpendicularmente a este puesto de enfundado.
El documento EP-A-395919 se refiere a una máquina de embalaje de una carga paletizada por medio de una película termorretráctil, que comprende cuatro barras verticales equipadas de pinzas de prensión de la película pudiendo subir y bajar en el armazón. Comprende además un horno de retracción anular, un par de travesaños 45 horizontales y dos carros que se pueden desplazar horizontalmente a lo largo de los travesaños. Las barras se acercan cuando el carro se desplaza hacia la sección de distribución y se separan cuando el carro se desplaza por encima de la carga que se va a embalar. Este mecanismo garantiza igualmente el enfundado. El desplazamiento del carro se ejecuta de igual modo perpendicularmente al puesto de enfundado.
En unos sistemas conocidos de este tipo, el eje transversal del puesto de enfundado se confunde obligatoriamente con el eje de conducción de la envoltura procedente de la bobina de almacenamiento. De ello resultan en ocasiones unas limitaciones de implantación de la bobina de almacenamiento de la envoltura con respecto a las limitaciones de posición del transportador de conducción de la carga que se va a embalar.
Además, el eje longitudinal de la carga que se va a embalar es obligatoriamente fijo y corresponde por construcción al eje longitudinal del dispositivo de transferencia y acumulación. Esto requiere posicionar la carga que se va a embalar en el puesto de enfundado con precisión según los dos ejes. En la mayoría de los casos, la utilización de un dispositivo de centrado transversal y/o longitudinal de la carga que se va a embalar se utiliza en el puesto del enfundado o más arriba de este.
Objeto de la invención
Un primer objeto de la invención consiste en mejorar el procedimiento de preparación y colocación de una funda sobre una carga que se va a embalar, para limitar las limitaciones de implantación de la bobina de almacenamiento de la envoltura con respecto a las limitaciones de posición del transportador de conducción de la carga que se va a embalar.
El procedimiento de embalaje según la invención se caracteriza por las etapas intermedias siguientes:
- determinar la posición del eje transversal mediano de la carga que se va a embalar con respecto al eje de
conducción de la envoltura,
- desplazar el dispositivo de transferencia y acumulación de la funda por encima de la carga que se va a
embalar, sincronizando el mando de posicionamiento de dicho dispositivo con los datos de la posición de la
carga que se va a embalar.
El posicionamiento de la carga se puede medir para definir dicha posición del eje transversal mediano o programar de antemano. El robot se posiciona así según una medida o una parametrización específica y la carga puede encontrarse en cualquier lugar sobre la cinta transportadora.
Durante la etapa de posicionamiento de la carga que se va a embalar, la posición del eje longitudinal de la carga que se va a embalar se mide y/o programa para permitir un posicionamiento longitudinal del dispositivo de transferencia y acumulación de la funda. De ello se deriva la posibilidad de suprimir el dispositivo de centrado longitudinal utilizado en el estado anterior.
Es igualmente posible medir y/o programar la posición de los dos ejes transversal y longitudinal del plano superior de la carga que se va a embalar. El dispositivo de transferencia y acumulación de la funda se puede posicionar entonces según estos ejes. De ello se deriva la posibilidad de utilizar unas envolturas que tengan un perímetro ajustado al perímetro de la carga que se va a embalar. En efecto, en esta versión, el perímetro de una envoltura se calcula en función de un juego funcional necesario entre el perímetro de la carga que se va a embalar y el de la funda. En la mayoría de los casos, las cargas que se van a embalar presentan una deformación que resulta generalmente de un desajuste del plano superior de la carga con respecto al plano inferior. Con el fin de preservar la película de las fricciones sobre la carga que se va a embalar, el perímetro de la envoltura se calcula en función del perímetro de mayor tamaño de la carga (unión de la proyección en el suelo de los perímetros de los diferentes planos de la carga que se va a embalar) . El posicionamiento del dispositivo de transferencia y acumulación de la funda según los ejes del plano superior de la carga permite equilibrar de la mejor manera el juego funcional durante el descenso del mecanismo de enfundado alrededor de la carga. Permite igualmente trabajar con una envoltura cuyo perímetro se ajusta al de la carga que se va a embalar y disminuir por tanto la cantidad de funda utilizada.
Durante la etapa de toma de la funda y separación de la misma, el mecanismo de enfundado posiciona los elementos de toma y separación en función de la posición del dispositivo de transferencia y acumulación de la funda.
Durante la etapa de descenso alrededor de la carga, el mecanismo de enfundado controla la posición de sus elementos de toma y separación en función de la posición de la carga que se va a embalar.
Puede que la carga que se va a embalar no sea detenida en la zona de enfundado. La medida de la posición del eje transversal de la carga se realiza mientras se transporta, con el fin de que el mecanismo de enfundado controle la posición de sus elementos de toma y separación de la funda para que sigan igualmente la posición de la carga de forma continua.
Es igualmente posible medir y/o programar la posición angular de los dos ejes transversal y longitudinal de la carga que se va a embalar. Durante la etapa de transferencia y de toma de la funda por el mecanismo de enfundado, interviene una rotación con respecto a un eje vertical de... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento de conformación y colocación de una funda (12) de embalaje sobre una carga (CH)
paletizada, estando dicha funda preparada a partir de una envoltura de plástico blando enrollada sobre al menos una 5 bobina de almacenamiento (17, 18) , procedimiento que consiste en:
- almacenar en un dispositivo de transferencia y acumulación (DTA) una longitud predeterminada de envoltura para constituir una funda (12) cerrada en un extremo, -volver a coger el extremo abierto opuesto y descender la funda (12) alrededor de la carga (CH) que se va a 10 embalar, manteniéndola abierta por sus cuatro ángulos;
caracterizado por las etapas intermedias siguientes:
- determinar la posición del eje transversal mediano (a1) de la carga (CH) con respecto al eje de conducción 15 (a3) de la envoltura, -y desplazar el dispositivo de transferencia y acumulación (DTA) de la funda (12) por encima de la carga (CH) , sincronizando el mando de posicionamiento de dicho dispositivo de transferencia y acumulación (DTA) con los datos de la posición de la carga (CH) .
2. Procedimiento según la reivindicación 1, caracterizado porque el posicionamiento de la carga (CH) se efectúa por una medida de dicha posición del eje transversal mediano (a1) .
3. Procedimiento según la reivindicación 1, caracterizado porque el posicionamiento de la carga (CH)
está programado para colocar el robot en una posición predeterminada. 25
4. Procedimiento según la reivindicación 1, caracterizado porque la posición del eje mediano longitudinal (a4) de la carga (CH) se mide y/o programa para adaptar un posicionamiento longitudinal del dispositivo de transferencia y acumulación (DTA) de la funda (12) .
5. Procedimiento según la reivindicación 4, caracterizado porque la posición del eje mediano transversal (a1) y del eje mediano longitudinal (a4) del plano superior de la carga (CH) se mide y/o programa para adaptar la posición del dispositivo de transferencia y acumulación (DTA) de la funda (12) .
6. Procedimiento según la reivindicación 4, caracterizado por una medida y/o programación de la 35 posición angular de los dos ejes transversal (a1) y longitudinal (a4) de la carga (CH) que se va a embalar.
7. Procedimiento según una de las reivindicaciones precedentes, caracterizado porque el mecanismo de enfundado adapta los dedos (28) del brazo de colocación (29) a la posición de transferencia del dispositivo de transferencia y acumulación (DTA) y la posición de la carga (CH) .
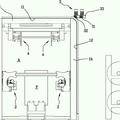
8. Máquina de embalaje controlada por un robot (15) , y que consta de: -un dispositivo de transferencia y acumulación (DTA) sobre el cual se enrolla una funda (12) , -un mecanismo de separación (21) del extremo abierto de la funda (12) después de la transferencia hacia un puesto de enfundado (13) , 45 caracterizada porque consta de un sistema de control (34) con captadores (35) destinado a medir la posición y el ángulo de inclinación del eje de conducción de la carga sincronizando el mando de posicionamiento del dispositivo de transferencia y acumulación (DTA) con los datos de la medida de la posición de la carga (CH) .
9. Máquina de embalaje según la reivindicación 8, caracterizada porque el dispositivo de transferencia y acumulación (DTA) efectúa una combinación de movimientos y rotaciones con respecto a un eje horizontal de un ángulo adaptado con el fin de garantizar la buena introducción de la película en los dedos (28) de toma y de separación.
Patentes similares o relacionadas:
Máquina de recubrimiento con dispositivo de almacenamiento de película, del 1 de Enero de 2020, de MESSERSI' PACKAGING S.R.L.: Una máquina de recubrimiento que comprende un almacén para alimentar una tira de película para enrollarla en un paquete que está dispuesto […]
 Procedimiento para el funcionamiento de una máquina de bolsas tubulares para la fabricación de bolsas con una soldadura transversal de fondo y una soldadura transversal de cabeza distinta a esta, del 25 de Septiembre de 2019, de Rovema GmbH: Procedimiento para el funcionamiento de una máquina de bolsas tubulares con un dispositivo de sellado transversal accionable biaxialmente para […]
Procedimiento para el funcionamiento de una máquina de bolsas tubulares para la fabricación de bolsas con una soldadura transversal de fondo y una soldadura transversal de cabeza distinta a esta, del 25 de Septiembre de 2019, de Rovema GmbH: Procedimiento para el funcionamiento de una máquina de bolsas tubulares con un dispositivo de sellado transversal accionable biaxialmente para […]
DISPOSITIVO PARA LA COLOCACIÓN DE CUBIERTAS PROTECTORAS SOBRE PRODUCTOS PALETIZADOS, del 4 de Junio de 2019, de CONTROLPACK SYSTEMS, S.L: Dispositivo para la colocación de cubiertas protectoras sobre productos paletizados; que comprende: una carcasa-bastidor , un dispensador […]
Máquina encapuchadora con estructura mejorada, del 15 de Mayo de 2019, de MESSERSI' PACKAGING S.R.L.: Máquina encapuchadora que comprende un sistema para formar una capucha a partir de un tubo de película que está en un estado plegado aplanado […]
 Una máquina para el embalaje de palés, del 31 de Octubre de 2018, de Officina Bocedi S.R.L: Una máquina para el embalaje de palés (P) por medio de una funda de película estirable, que comprende: un bastidor principal, que comprende dos pares de montantes (1b) y […]
Una máquina para el embalaje de palés, del 31 de Octubre de 2018, de Officina Bocedi S.R.L: Una máquina para el embalaje de palés (P) por medio de una funda de película estirable, que comprende: un bastidor principal, que comprende dos pares de montantes (1b) y […]
Procedimiento para fabricar una unidad de envasado sin palés y unidad de envasado fabricada según el procedimiento, del 25 de Abril de 2018, de Maschinenfabrik Möllers GmbH (100.0%): Procedimiento para fabricar una unidad de envasado sin palés, que comprende varios objetos de envasado apilados hasta formar una […]
Dispositivo para envolver una pila de productos con una cubierta de tubo flexible y procedimiento para cambiar la reserva de tubo flexible en un dispositivo correspondiente, del 14 de Febrero de 2018, de Maschinenfabrik Möllers GmbH (100.0%): Dispositivo para envolver una pila de productos sueltos formada por una pluralidad de piezas de productos sueltos dispuestas unas sobre otras con una […]
Paquete para provisiones, del 20 de Diciembre de 2017, de Heynen Systems B.V: Uso de un paquete para provisiones de una cantidad de material de punto tubular circular elástico y tricotado, constituido por un paquete […]