Sistema y método de espectroscopia Raman no tripulado a distancia.
Un sistema que incluye un vehículo terrestre no tripulado (UGV) (410) que tiene un sensor Raman,
el sistema comprende:
un vehículo terrestre no tripulado (UGV), que tiene un brazo robótico (425),
una cámara (420) montada sobre el brazo robótico (425);
un láser y un telescopio asociado (450) montados en el brazo robótico (425) de tal manera que apunten sustancialmente en un mismo sentido al que apunta la cámara;
un módulo (464) de adquisición y control de datos montado en el UGV y configurado para recibir datos de espectro Raman desde el telescopio; y
una estación base a distancia (480) que tiene una pantalla (486) y un módulo (484) de procesamiento y análisis de datos que está configurado para recibir datos del módulo de adquisición y control de datos;
caracterizado porque el telescopio (450) comprende un sistema de enfoque automático que incluye una lente (615) que se dispone para obtener imágenes de un punto de rayo láser en un objetivo en una distribución de detectores lineales (610) y que se encuentra para evaluar la distancia del objetivo basándose en el paralaje, en donde la lente (615) y la distribución lineal de detectores (610) se disponen a lo largo de un mismo eje que está fuera de eje respecto un eje a lo largo del cual la luz láser viaja hacia el objetivo y en donde la luz reflejada desde el objetivo se pasa directamente a la lente sin intervenir la reflexión.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08167370.
Solicitante: Exelis Inc. .
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 1650 Tysons Boulevard, Suite 1700 McLean, VA 22102 ESTADOS UNIDOS DE AMERICA.
Inventor/es: REZAC,JEROMY P, LAVALLEY,JEREMY PAUL, HIGDON,NOAH SCOTT, MCKECHNIE,THOMAS STUART.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01N21/65 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 21/00 Investigación o análisis de los materiales por la utilización de medios ópticos, es decir, utilizando rayos infrarrojos, visibles o ultravioletas (G01N 3/00 - G01N 19/00 tienen prioridad). › Difusión de Raman.
PDF original: ES-2397107_T3.pdf
Fragmento de la descripción:
Sistema y método de espectroscopia Raman no tripulado a distancia.
Campo de la invención La presente invención está relacionada con espectroscopia Raman, y más particularmente con sistemas y métodos para la integración de funcionalidad de espectroscopia Raman con un vehículo terrestre no tripulado, tal como un robot.
Antecedentes de la invención El peligro de la exposición a agentes químicos o biológicos puede ser grave. Ya sea el resultado de una liberación involuntaria, a modo de, por ejemplo, un accidente, o una entrega intencionada, es deseable identificar de forma rápida y precisa (1) el tipo de agente que ha sido liberado y (2) la zona precisa de contaminación. La detección precoz y precisa de estas sustancias peligrosas puede ser un factor significativo a la hora de reducir posibles víctimas y limitar la propagación adicional del agente, por ejemplo, por el viento, contacto humano y animal, etc.
En los últimos años, ha habido un creciente interés por el desarrollo y la implementación de la tecnología de sensores nucleares, biológicos y químicos (NBC) para identificar rápidamente sustancias, contaminantes y agentes desconocidos, incluso en concentraciones muy bajas. Las tecnologías anteriores diseñadas para medir la contaminación química depositada en una superficie utilizan vehículos y equipos asociados de prueba que recuperaban una muestra física de la sustancia contaminante y, a continuación, utilizaban un proceso extremadamente largo y engorroso basado en un sistema mecánico con ruedas de muestreo para probar los agentes químicos.
En vista de la complejidad de tales soluciones, se deseaban nuevas tecnologías más simples. Una tecnología emergente en respuesta a este deseo se conoce, en general, como "detección apartada de la superficie", y se refiere a una categoría de tecnologías que permiten detectar una sustancia sin tener que entrar en contacto físicamente con la sustancia. El objetivo de estos sistemas de detección es el de proporcionar la capacidad de detectar, identificar, localizar, cuantificar, advertir e informar de amenazas químicas y biológicas y, por lo tanto, dar a las fuerzas militares o al personal civil una alerta suficientemente temprana para evitar una contaminación (adicional) .
Una de las tecnologías que permite la detección apartada de la superficie es la espectrometría Raman. La espectrometría Raman es una técnica que se utiliza para caracterizar materiales y posteriormente para identificar este tipo de material. Normalmente, un transmisor láser sirve como una fuente de luz espectralmente estrecha con alta irradiancia. El láser ilumina una sustancia conocida o desconocida, tal como compuestos químicos, agentes biológicos, entre otros. Una parte de la luz incidente es dispersada según Raman por la sustancia. Esta luz se dispersa en todas direcciones espaciales y también es desplazada espectralmente en distintas longitudes de onda discretas. Estos desplazamientos de longitud de onda corresponden a energías vibratorias únicas asociadas con los enlaces moleculares de la sustancia.
En los sistemas convencionales de espectroscopia Raman, la luz dispersada según Rama es captada por un telescopio y es acoplada en un sistema óptico dispersivo. El telescopio enfoca la luz captada sobre, por ejemplo, un manojo de fibras ópticas. En el extremo opuesto del manojo de fibras, las fibras individuales se orientan linealmente para formar una hendidura de entrada para un espectrógrafo de rejilla. Una distribución de detectores electro-ópticos registra el espectro óptico de la luz dispersada según Raman. Este espectro sirve como una “huella digital” de la sustancia conocida o desconocida. Un ordenador de análisis almacena la “huella digital” junto con información que identifica la sustancia conocida, o más a menudo, emplea algoritmos de coincidencia de patrones para identificar la sustancia desconocida a partir de una biblioteca de espectros de sustancias analizadas anteriormente y “huellas digitales”.
Los sistemas de espectrometría Raman con base en laboratorio se conocen desde hace muchos años. Recientemente, se han posibilitado los sistemas portátiles de Raman como resultado de que los componentes han disminuido de tamaño. Una descripción de uno de esos sistemas portátiles se encuentra la patente de EE.UU.
6.608.677. Un sensor Raman portátil implementado en una mochila también ha sido recientemente puesto en práctica por ITT (Wilmington, Delaware) . Aspectos de ese sistema se describen en la solicitud de patente nº de publicación 2007-0222981, titulada Método, aparato y sistema para detección apartada rápida y sensible de contaminantes en la superficie. Hasta la fecha también se han puesto en práctica sensores Raman montados sobre camiones. También puede hacerse referencia a la patente de EE.UU. 6.788.407 para una explicación adicional de la espectrometría Raman.
Los documentos WO 2007/032814 A2 y US 2007/002319 A1 se dirigen a sistemas para llevar a cabo espectroscopia Raman a distancia usando un robot equipado con un brazo robótico o brazo articulado. Sin embargo, estos sistemas no funcionan dentro de un alcance apartado ajustable de 0, 5 a 10 metros.
A pesar de estos sistemas conocidos, sigue existiendo la necesidad de proporcionar diferentes formas de sensores Raman para satisfacer las necesidades de personal civil y militar responsable de la identificación y, en última instancia, la manipulación de sustancias y elementos peligrosos.
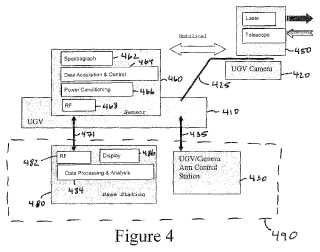
Sumario de la invención La presente invención proporciona un sistema que incluye un vehículo terrestre no tripulado (UGV del inglés unmanned ground vehicle) (410) con un sensor Raman, el sistema comprende un vehículo terrestre no tripulado (UGV) , con un brazo robótico. Una cámara está montada sobre un brazo robótico (425) montado junto con un láser y un telescopio asociado de tal manera que apunten sustancialmente en un mismo sentido en el que apunta la cámara. Un módulo de adquisición y control de datos está montado en el UGV y está configurado para recibir datos de espectro Raman desde el telescopio. Una estación base a distancia que tiene una pantalla y un módulo de procesamiento y análisis de datos está configurado para recibir datos del módulo de adquisición y control de datos que está montado en el UVG.
Por lo tanto, la presente invención proporciona una implementación única de un sensor de espectroscopia Raman en el que los componentes del sistema están montados sobre, o, preferiblemente, están estrechamente integrados con, un vehículo terrestre no tripulado (UGV) o robot que funciona de manera autónoma o que es controlado por un usuario a distancia. Con este tipo de configuración, los usuarios del sensor Raman pueden evitar tener que estar en las inmediaciones de las sustancias o elementos peligrosos. Más en particular, con realizaciones según la presente invención, se proporciona al personal la capacidad de realizar la explotación del sitio a distancia pero delicada incluyendo la inspección de edificios, equipos, vehículos, aeronaves y otras superficies artificiales o naturales en busca de la presencia de sustancias desconocidas o elementos que incluyen, aunque no se limitan a los siguientes, material explosivo (p. ej., TNT y RDX) , explosivos caseros y sus precursores y sustancias químicas, incluyendo agentes de guerra química (CWA del ingles chemical warfare agents) , y productos químicos tóxicos industriales (TIC del inglés toxic industrial chemical) . Una ventaja importante de las realizaciones de la presente invención es la capacidad de buscar y detectar dispositivos explosivos improvisados (IED del inglés improvised explosive devices) sin tener que poner a la gente en la misma ubicación en la que podrían estar ocultos los explosivos.
Otra de las ventajas de realizaciones de la presente invención incluyen el hecho de que la tecnología (1) es sin contacto (p. ej., es un sistema apartado) , (2) permite la asignación de la contaminación de la superficie, y (3) proporciona una rápida respuesta (normalmente sólo segundos para realizar detección) .
En una realización, la presente invención proporciona un UGV que incluye un brazo robótico que puede ser orientable por sí mismo o por medio de la dirección del propio UGV. El UGV es controlado preferiblemente a distancia a través de un enlace de radiofrecuencia (RF) .
El brazo robótico incluye preferiblemente una cámara, y las imágenes de la cámara son preferiblemente transmitidas (en el enlace de RF) de vuelta a una estación de control desde el que un operario puede controlar el UGV. De esta forma, el operario puede dirigir adecuadamente el UGV y apuntar la cámara hacia los objetivos de interés.... [Seguir leyendo]
Reivindicaciones:
1. Un sistema que incluye un vehículo terrestre no tripulado (UGV) (410) que tiene un sensor Raman, el sistema comprende:
un vehículo terrestre no tripulado (UGV) , que tiene un brazo robótico (425) ,
una cámara (420) montada sobre el brazo robótico (425) ;
un láser y un telescopio asociado (450) montados en el brazo robótico (425) de tal manera que apunten sustancialmente en un mismo sentido al que apunta la cámara;
un módulo (464) de adquisición y control de datos montado en el UGV y configurado para recibir datos de espectro Raman desde el telescopio; y
una estación base a distancia (480) que tiene una pantalla (486) y un módulo (484) de procesamiento y análisis de datos que está configurado para recibir datos del módulo de adquisición y control de datos;
caracterizado porque el telescopio (450) comprende un sistema de enfoque automático que incluye una lente (615) que se dispone para obtener imágenes de un punto de rayo láser en un objetivo en una distribución de detectores lineales (610) y que se encuentra para evaluar la distancia del objetivo basándose en el paralaje, en donde la lente (615) y la distribución lineal de detectores (610) se disponen a lo largo de un mismo eje que está fuera de eje respecto un eje a lo largo del cual la luz láser viaja hacia el objetivo y en donde la luz reflejada desde el objetivo se pasa directamente a la lente sin intervenir la reflexión.
2. El sistema de la reivindicación 1, que comprende además un espectrógrafo (462) que recibe luz dispersada según Raman desde el telescopio.
3. El sistema de la reivindicación 1 o 2, que comprende además un cordón umbilical que conecta el láser y el telescopio asociado (450) con el módulo (464) de adquisición y control de datos.
4. El sistema de una de las reivindicaciones 1 a 3, en donde la estación base (480) recibe imágenes desde la cámara (420) y muestra las mismas en una pantalla (486) .
5. El sistema de la reivindicación 4, en donde la pantalla (486) es una pantalla táctil.
6. El sistema de una de las reivindicaciones 1 a 5, en donde el láser funciona a una frecuencia de aproximadamente 262 nm.
7. El sistema de reivindicación 1, en donde el sistema de enfoque automático comprende un espejo primario que es movible linealmente en una fase de traslación.
8. El sistema según cualquiera de las reivindicaciones 1 a 7, en donde el sistema de enfoque automático comprende un espejo secundario que es movible linealmente en una fase de traslación.
9. El sistema de la reivindicación 1, en donde la distribución lineal de detectores está inclinada con un ángulo consistente con el ángulo Scheimpflug.
10. El sistema de la reivindicación 1 o 9, que comprende además de un filtro dispuesto en frente de la distribución lineal de detectores.
11. El sistema de la reivindicación 1 a 10, en donde el sistema de enfoque automático proporciona una profundidad de enfoque de + /-1 mm.
12. El sistema de una de las reivindicaciones 1 a 11, en donde el telescopio se puede enfocar para tener un alcance apartado de aproximadamente 0, 5 m a aproximadamente 10 m.
13. El sistema de una de las reivindicaciones 1 a 12, en donde el láser y el telescopio asociado (450) y el módulo (464) de adquisición y control de datos están configurados de forma modular de tal manera que el láser y el telescopio asociado y el módulo de adquisición y control de datos pueden ser empleados por un sensor Raman portátil.
14. El sistema de una de las reivindicaciones 1 a 13, en donde el UGV es controlado a distancia.
15. El sistema de una de las reivindicaciones 1 a 13, en donde el UGV funciona de forma autónoma.
Patentes similares o relacionadas:
Un sistema óptico integrado para el examen de materiales de muestra, del 10 de Junio de 2020, de Iris Technology Solutions SL: Un sistema óptico que comprende: una fuente de luz ; un sistema de suministro de luz que comprende un reflector de una primera abertura […]
Procedimiento para marcar una sustancia característica, característica de seguridad, documento de valor y procedimiento para su comprobación, del 12 de Febrero de 2020, de Giesecke+Devrient Currency Technology GmbH: Procedimiento para marcar una sustancia característica luminiscente presente, en particular, en forma de polvo, con, como mínimo, un marcador luminiscente, tal que […]
Aparato para la medición in vivo no invasiva mediante espectroscopía Raman, del 11 de Diciembre de 2019, de RSP Systems A/S: Un aparato de medición in vivo no invasiva mediante espectroscopía Raman de glucosa presente en el líquido intersticial en la piel de un sujeto , […]
Ensayos de nanomarcadores de DRPS, del 16 de Octubre de 2019, de SICPA HOLDING SA: Un método de producción de un espectro de dispersión Raman potenciada en superficie (DRPS) que comprende: proporcionar una primera nanopartícula […]
Un dispositivo de monitorización, un sistema y un procedimiento para monitorizar el estado de las frutas, del 16 de Octubre de 2019, de INL - International Iberian Nanotechnology Laboratory: Un dispositivo de monitorización para monitorizar el estado de las frutas, comprendiendo el dispositivo de monitorización : una tira […]
Dispositivo y método de análisis asociado para la realización de unidades de separación de xilenos en lecho móvil simulado utilizando un espectrómetro de Raman, del 9 de Octubre de 2019, de AXENS: Unidad de separación de xilenos en lecho móvil simulado, llamada unidad LMS, que incluye dos adsorbedores (A) y (B) conectados en serie, […]
DISPOSITIVO MICROFLUÍDICO, del 30 de Agosto de 2019, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS: Se describe en este documento un dispositivo de microfluídica para SERS. Se describe un dispositivo para la realización de espectroscopia Raman aumentada […]
DISPOSITIVO MICROFLUÍDICO, del 29 de Agosto de 2019, de CONSEJO SUPERIOR DE INVESTIGACIONES CIENTIFICAS: Se describe en este documento un dispositivo de microfluídica para SERS. Se describe un dispositivo para la realización de espectroscopía Raman aumentada […]