Sistema y método para controlar la tracción en un vehículo de dos ruedas.
Método para el control de la tracción en un vehículo de dos ruedas (120) que comprende un motor controlado porpar (121) y una pluralidad de sensores (122) para la medición instantánea de parámetros de conducción (v,
j, q, w,x, a, RPM, marcha ) de dicho vehículo (120), comprendiendo el método las etapas de:
- determinación de un valor de referencia de deslizamiento (l0) como una función de un parámetro (q) representativode una solicitud de par de un usuario, dicho parámetro (q) representativo de una solicitud de par es detectadomediante dicha pluralidad de sensores (122);
- estimación de un valor de deslizamiento instantáneo (lS);
- determinación de un primer componente (TCL) de una señal de par solicitada a dicho motor (121) en base a ladiferencia entre dicho valor de referencia de deslizamiento (l0) y dicho valor de deslizamiento instantáneo (ls);
caracterizado porque dicho valor de referencia de deslizamiento (l0) se determina por medio de un mapa de pardeslizamientoque correlaciona dicho parámetro (q), representativo de una solicitud de par, con un deslizamiento (l),dicho mapa de par-deslizamiento variando en función de una velocidad longitudinal (v) y un ángulo de vuelco (j) dedicho vehículo de dos ruedas (120) detectados mediante dicha pluralidad de sensores (122).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10163916.
Solicitante: PIAGGIO & C. S.P.A..
Nacionalidad solicitante: Italia.
Dirección: VIALE RINALDO PIAGGIO 25 56025 PONTEDERA (PISA) ITALIA.
Inventor/es: SAVARESI,SERGIO,MATTEO, FABBRI,LUCA, CORNO,MATTEO, FORMENTIN,SIMONE.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60K28/16 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60K DISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › B60K 28/00 Dispositivos de seguridad para el control de la unidad de propulsión, especialmente adaptados para o dispuestos en vehículos, p. ej. que impiden el suministro de combustible o el encendido en caso de condiciones potencialmente peligrosas (para vehículos propulsados eléctricamente B60L 3/00; sistemas para control de la conducción del vehículo para fines no relacionados con el control de una subunidad particular B60W 30/00; sistemas de control d la conducción especialmente adaptados para vehículos terrestres autónomos B60W 60/00). › que responden o previenen el derrape o patinado de las ruedas (sistemas de control del frenado para la estabilidad del vehículo B60T 8/1755; dispositivos que regulan la fuerza de frenado sobre la rueda según una condición de velocidad B60T 8/32; control de la estabilidad del vehículo por otros medios distintos al control de la unidad propulsora únicamente B60W 30/02; prevención del patinado reduciendo la fuerza motriz en vehículos de raíl B61C 15/12).
PDF original: ES-2398652_T3.pdf
Fragmento de la descripción:
Sistema y método para controlar la tracción en un vehículo de dos ruedas La presente invención se refiere a un sistema y a un método para controlar la tracción en un vehículo de dos ruedas.
En los vehículos en general, y en particular en vehículos de dos ruedas o vehículos de motor, el control de la tracción se lleva a cabo mediante el control del deslizamiento de las ruedas motrices durante la aceleración, de una manera tal como para garantizar un buen agarre a la carretera y para mejorar de ese modo la seguridad y las condiciones de conducción del propio vehículo.
En particular, es necesario un nivel no nulo de deslizamiento longitudinal a fin de ofrecer tracción en la dirección de movimiento del vehículo.
Sin embargo, cuando un vehículo tiene que hacer frente a una curva, un valor no nulo de deslizamiento longitudinal, provoca una reducción de la fuerza lateral que el neumático puede ejercer. Este efecto es especialmente crítico en vehículos de dos ruedas en los que la fuerza lateral ejercida por los neumáticos no sólo permite que el vehículo pueda completar la curva, sino que también estabiliza la dinámica vuelco. Por lo tanto, en un vehículo de motor, existen necesidades opuestas de deslizamiento en función de si se está moviendo en una recta o a punto de abordar una curva.
Una primera solución conocida para controlar la tracción en vehículos de motor fomenta la seguridad limitando el nivel de deslizamiento de la rueda motriz con independencia de las condiciones instantáneas de inclinación.
Tal método lleva a cabo un control de bucle cerrado el cual estima el valor de deslizamiento instantáneo basado en valores de medición instantáneos, y ajusta el par entregado por el motor del vehículo con el fin de mantener el valor de deslizamiento instantáneo por debajo de un valor límite.
A fin de garantizar un alto nivel de adhesión lateral para cada condición de inclinación, en tal planteamiento 30 conocido, el nivel límite de deslizamiento se elige de una manera conservadora.
La elección conservadora del valor límite de deslizamiento conduce, sin embargo, a un rendimiento más bajo cuando el vehículo de motor está en aquellas condiciones en las que un nivel de deslizamiento mayor que el límite ofrecería una mayor tracción y por lo tanto, una mayor aceleración, sin llevar el vehículo a una condición inestable.
Un segundo método conocido para controlar la tracción en los vehículos de motor se aplica a vehículos de carreras. Tales sistemas están diseñados y calibrados para asegurar las máximas prestaciones en pistas conocidas. Están centrados así en los aspectos de rendimiento y no están desarrollados para asegurar la robustez cuando se enfrentan a condiciones variables de adhesión. Tales sistemas son por lo tanto difíciles de aplicar en la producción de vehículos.
En los métodos conocidos de control de bucle cerrado, la estimación del valor de deslizamiento instantáneo se lleva a cabo habitualmente de forma aproximada simplemente igualando la diferencia entre la velocidad de rotación de las ruedas delanteras y traseras.
De tal manera, sin tener en cuenta diferentes parámetros adicionales que afectan al deslizamiento instantáneo, el control se basa en un valor de realimentación impreciso, y por lo tanto no es muy fiable, ya que las posibles imprecisiones en el valor de realimentación conducen a una reacción igualmente imprecisa del sistema.
Por otra parte, los sistemas de circuito cerrado, a pesar de que pueden garantizar una mayor robustez, son generalmente más lentos en responder a las variaciones de referencia con respecto a los sistemas de control de alimentación directa.
Finalmente, se conoce un método de alimentación directa para controlar la tracción que ajusta el par entregado por
el motor, y en consecuencia el deslizamiento instantáneo, en base a algunos parámetros de entrada conocidos, tales como las revoluciones del motor, la marcha metida, la posición de la válvula de mariposa y así sucesivamente.
Tal método de control, que no está basado en el ajuste de la realimentación del deslizamiento instantáneo, no es capaz de adaptarse a las condiciones instantáneas de la superficie de conducción y del vehículo, como por ejemplo 60 la adhesión ofrecida por la superficie de la carretera o el estado de desgaste de los neumáticos, y por lo tanto sólo se puede usar en contextos competitivos en los que es posible mapear y describir con un alto nivel de detalle cada maniobra de la pista.
El documento DE 33 37 155 A1 describe un método para el control de tracción en un vehículo de dos ruedas según 65 el preámbulo de la reivindicación 1.
El propósito de la presente invención es el de evitar los inconvenientes antes mencionados y, en particular, el de idear un método para controlar la tracción en un vehículo de dos ruedas que sea capaz de garantizar un buen nivel de estabilidad del vehículo ofreciendo a la vez las mejores prestaciones posibles, que serán alcanzadas dependiendo de las condiciones de conducción particulares.
Otro propósito de la presente invención es el de proporcionar un método para controlar la tracción en un vehículo de dos ruedas que sea capaz de estimar el valor de deslizamiento instantáneo del vehículo de motor de una manera precisa, consiguiendo de tal manera un control más robusto.
Un propósito adicional de la presente invención es el de idear un método para controlar la tracción en un vehículo de dos ruedas que sea capaz de adaptarse a las condiciones instantáneas del vehículo y de la superficie de la carretera, sin renunciar sin embargo a una reacción rápida del sistema.
El propósito último pero no menos importante de la presente invención es el de hacer un sistema para controlar la tracción en un vehículo de dos ruedas que sea capaz de implementar el método de control de acuerdo con la invención. Estos y otros propósitos de acuerdo con la presente invención se consiguen haciendo un sistema y un método para controlar la tracción en un vehículo de dos ruedas como se describe en las reivindicaciones independientes.
Las características adicionales del sistema y del método para el control de tracción en un vehículo de dos ruedas son objeto de las reivindicaciones dependientes.
Las características y las ventajas de un sistema y de un método para controlar la tracción en un vehículo de dos ruedas de acuerdo con la presente invención serán más claras en la siguiente descripción, dada como un ejemplo y
no limitativo, con referencia a los dibujos esquemáticos adjuntos, en los que:
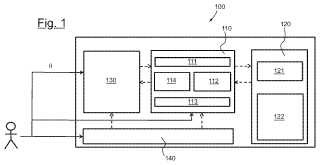
- la figura 1 es una representación esquemática del sistema de control que implementa el método para controlar la tracción en un vehículo de dos ruedas de acuerdo con la presente invención;
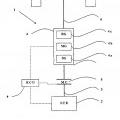
-la figura 2 es un diagrama de bloques que representa el método para controlar la tracción en un vehículo de dos ruedas de acuerdo con la presente invención;
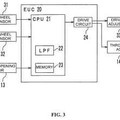
- las figuras 3a y 3b son una representación esquemática de los posibles mapas de umbrales usados en el método
para el control de tracción en un vehículo de dos ruedas de acuerdo con la presente invención; 35
- la figura 4 es un gráfico que representa un posible modo de realización del generador de un deslizamiento de referencia utilizado en el método para el control de tracción en un vehículo de dos ruedas de acuerdo con la presente invención.
Con referencia a las figuras, un sistema para controlar la tracción en un vehículo de dos ruedas, se muestra, totalmente indicado con el número de referencia 100.
El sistema de control de la tracción 100 comprende un bloque de control 110 acoplado con un motor 121 de un vehículo de dos ruedas 120, en la que el motor 121 puede ser controlado por par, es decir, capaz de entregar un par
instantáneo τ solicitado por el sistema 100.
En particular, el ajuste del par requerido se obtiene generalmente mediante la variación del avance del encendido de cada cilindro, o, preferiblemente, a través del control electrónico de la válvula de mariposa a fin de poder explotar todo el rango de par que el motor 121 es capaz de generar, o incluso mediante la combinación de los dos métodos.
En vehículos con un motor 121 en el que se puede controlar el par, un sistema para controlar el motor (no mostrado) está previsto que traduzca la petición que un usuario lleva a cabo a través del acelerador, en un par de referencia τ. La traducción se lleva a cabo por medio de mapas que relacionan la posición del acelerador, la marcha insertada y el número de revoluciones del motor con el par τ solicitado... [Seguir leyendo]
Reivindicaciones:
1. Método para el control de la tracción en un vehículo de dos ruedas (120) que comprende un motor controlado por
par (121) y una pluralidad de sensores (122) para la medición instantánea de parámetros de conducción (v, ϕ, θ, ω, 5 x, a, RPM, marcha ) de dicho vehículo (120) , comprendiendo el método las etapas de:
- determinación de un valor de referencia de deslizamiento (λ0) como una función de un parámetro (θ) representativo de una solicitud de par de un usuario, dicho parámetro (θ) representativo de una solicitud de par es detectado mediante dicha pluralidad de sensores (122) ;
- estimación de un valor de deslizamiento instantáneo (λS) ;
- determinación de un primer componente (TCL) de una señal de par solicitada a dicho motor (121) en base a la diferencia entre dicho valor de referencia de deslizamiento (λ0) y dicho valor de deslizamiento instantáneo (λs) ;
caracterizado porque dicho valor de referencia de deslizamiento (λ0) se determina por medio de un mapa de pardeslizamiento que correlaciona dicho parámetro (θ) , representativo de una solicitud de par, con un deslizamiento (λ) , dicho mapa de par-deslizamiento variando en función de una velocidad longitudinal (v) y un ángulo de vuelco (ϕ) de dicho vehículo de dos ruedas (120) detectados mediante dicha pluralidad de sensores (122) .
2. Método para el control la tracción en un vehículo de dos ruedas (120) según la reivindicación 1, caracterizado porque comprende las etapas de grabación de un valor de deslizamiento inicial (λhold) , un valor inicial de dicho ángulo de vuelco (ϕhold) y un valor inicial de dicho parámetro (θhold) representativo de una solicitud de par caracterizadora de dicho vehículo (120) al activar el control de tracción; dicho mapa de par-deslizamiento satisface las condiciones siguientes:
- dicho valor referencia de deslizamiento (λ0) corresponde a un valor de deslizamiento máximo (λmax) permitido para dicha velocidad longitudinal (v) y dicho ángulo de vuelco (ϕ) , cuando dicho parámetro (θ) representativo de una solicitud de par presenta un valor máximo;
- dicho valor referencia de deslizamiento (λ0) corresponde a dicho valor de deslizamiento inicial (λhold) , cuando dicho parámetro (θ) representativo de una solicitud de par corresponde a dicho valor inicial de dicho parámetro (θhold) representativo de una solicitud de par y cuando dicho ángulo de vuelco (ϕ) corresponde a dicho valor inicial de dicho ángulo de vuelco (ϕhold) ; y
- dicho valor referencia de deslizamiento (λ0) es igual a cero, cuando dicho parámetro (θ) representativo de una solicitud de par es igual a cero.
3. Método para el control la tracción en un vehículo de dos ruedas (120) según la reivindicación 2, caracterizado porque dicho valor de deslizamiento máximo (λmax) se elige sobre la base de una primera pluralidad de mapas de umbrales que definen un valor de deslizamiento máximo (λmax) y un valor de deslizamiento mínimo (λmin) como una función de dicha velocidad longitudinal (v) y dicho ángulo de vuelco (ϕ) .
4. Método para el control de la tracción en un vehículo de dos ruedas (120) según la reivindicación 3, caracterizado 45 porque comprende una etapa de comprobación de al menos una condición de activación del control de tracción, siendo dicha al menos una condición de activación que se sobrepase un deslizamiento mínimo (λmin) elegido en base a dicha primera pluralidad de mapas de umbrales, o una velocidad mínima de variación de dicho parámetro (θ) representativo de una solicitud de par de un usuario seleccionado sobre la base de una segunda pluralidad de mapas de umbrales que definen un valor de variación de velocidad mínimo de dicho parámetro (θ) representativo de 50 una solicitud de par de un usuario como una función de dicha velocidad longitudinal (v) y de dicho ángulo de vuelco (ϕ) .
5. Método para el control la tracción en un vehículo de dos ruedas (120) según una de las reivindicaciones precedentes, caracterizado porque dicho parámetro (θ) representativo de una solicitud de par es la posición angular 55 de apertura de un acelerador de dicho vehículo (120) o de un válvula de mariposa de dicho vehículo (120) .
6. Método de control de tracción en un vehículo de dos ruedas (120) según cualquiera de las reivindicaciones precedentes, caracterizado porque dicha etapa de estimación de un valor de deslizamiento instantáneo (λs) consiste en calcular un valor de deslizamiento nominal basado en una velocidad de rotación (ωf, ωr) de una rueda delantera y
una rueda trasera de dicho vehículo (120) detectada por dicha pluralidad de sensores (122) y un valor nominal de radio (r) de dichas ruedas, y corregir dicho valor de deslizamiento nominal en base a al menos una de las mediciones detectadas por medio de dicha pluralidad de sensores (122) que comprende:
- un recorrido de una suspensión delantera (xf) de dicho vehículo (120) ;
- un recorrido de una suspensión trasera (xr) de dicho vehículo (120) ;
- una aceleración longitudinal (a) de dicho vehículo (120) ; 5
- dicho ángulo de vuelco (ϕ) de dicho vehículo (120) .
7. Método de control de tracción en un vehículo de dos ruedas (120) según cualquiera de las reivindicaciones precedentes, caracterizado porque comprende una etapa de determinación de un segundo componente (τOL) de una señal de par solicitada a dicho motor (121) sobre la base de al menos uno de dicho parámetro (θ) representativo de una solicitud de par de un usuario, dicha velocidad longitudinal (v) , dicho ángulo de vuelco (ϕ) y una velocidad del motor (RPM) detectados por medio de dicha pluralidad de sensores (122) .
8. Método de control de tracción en un vehículo de dos ruedas (120) según la reivindicación 7 caracterizado porque dicho primer componente (τCL) de una señal de par y dicho segundo componente (τOL) de una señal de par se añaden a una señal de par (τhold) correspondiente al par requerido a dicho motor (121) al activar el control de tracción.
9. Método de control de tracción en un vehículo de dos ruedas (120) según una de las reivindicaciones 7 u 8,
caracterizado porque dicho primer componente (τCL) de una señal de par y dicho segundo componente (τOL) de una señal de par son de frecuencia mezclada a través de un parámetro de mezcla (μ) adaptado para filtrar en mayor medida un primer componente de dichos dos componentes de una señal de par (τCL, τOL) con respecto al otro.
10. Sistema (100) para el control de tracción en un vehículo de dos ruedas (120) , dicho vehículo de dos ruedas (120)
comprende un motor controlado por par (121) y una pluralidad de sensores (122) para la medición instantánea de parámetros de conducción (v, ϕ, θ , ω, x, a, RPM, marcha) de dicho vehículo (120) , dicho sistema (100) comprende un bloque de control (110) conectado a dicho motor (121) con el fin de proporcionar una señal (To) que corresponde a un par requerido como una entrada a dicho motor (121) , dicho bloque de control (110) está conectado como una entrada a dicha pluralidad de sensores (122) , dicho bloque de control (110) comprende un controlador de bucle cerrado (112) adaptado para determinar un primer componente (τCL) de dicha señal (τ0) correspondiente a un par solicitado, conectado como una entrada a un reconstructor de deslizamiento (113) para la estimación de un deslizamiento instantáneo (λS) y a un generador de referencia (111) para la generación de un deslizamiento de referencia (λ0) , caracterizado porque dicho generador de referencia (111) está adaptado para determinar un deslizamiento de referencia (λ0) basado en un mapa de par-deslizamiento que correlaciona un parámetro (θ)
representativo de una solicitud de par detectada por medio de dicha pluralidad de sensores (122) con un deslizamiento (λ) , dicho mapa de par-deslizamiento variará en función de una velocidad longitudinal (v) y un ángulo de vuelco (ϕ) detectados por medio de dicha pluralidad de sensores (122) .
11. Sistema (100) para el control de tracción en un vehículo de dos ruedas (120) según la reivindicación 10
caracterizado porque dicho reconstructor de deslizamiento (113) está conectado como una entrada a dicha pluralidad de sensores (122) a fin de estimar dicho deslizamiento instantáneo (λS ) mediante la determinación de un valor de deslizamiento nominal en base a una velocidad de rotación (ωf, ωr) de una rueda delantera y de una rueda trasera de dicho vehículo (120) detectada por medio de dicha pluralidad de sensores (122) y un valor nominal de radio (r) de dichas ruedas, y mediante la corrección de dicho valor de deslizamiento nominal en base a al menos una 45 de las mediciones detectadas por medio de dicha pluralidad de sensores (122) que comprende:
- un recorrido de una suspensión delantera (xf) de dicho vehículo (120) ;
- un recorrido de una suspensión trasera (xr) de dicho vehículo (120) ; 50
- una aceleración longitudinal (a) de dicho vehículo (120) ;
- dicho ángulo de vuelco (ϕ) de dicho vehículo (120) .
12. Sistema (100) para el control de tracción en un vehículo de dos ruedas (120) según la reivindicación 10 u 11 caracterizado porque comprende al menos un controlador de alimentación directa (114) adaptado para determinar un segundo componente (τOL) de dicha señal (τ0) correspondiente a un par solicitado sobre la base de una pluralidad de parámetros instantáneos de conducción de dicho vehículo (120) detectada por medio de dicha pluralidad de sensores (122) .
13. Sistema (100) para el control de tracción en un vehículo de dos ruedas (120) según la reivindicación 12 caracterizado porque la acción de dicho controlador de bucle cerrado (112) y dicho controlador de alimentación directa (114) se mezcla a través de un parámetro de mezcla (μ) adaptado para modificar el ancho de banda de la misma.
14. Sistema (100) para el control de tracción en un vehículo de dos ruedas (120) según una de las reivindicaciones 10 a 13 caracterizado porque comprende un bloque de supervisión (130) adaptado para gestionar la activación de dicho bloque de control (110) al sobrepasar al menos un parámetro de activación que comprenden un valor de
deslizamiento mínimo (λmin) y un valor de variación de la velocidad mínimo de dicho parámetro (θ) representativo de una solicitud de par de un usuario.
15. Sistema (100) para el control de tracción en un vehículo de dos ruedas (120) según una de las reivindicaciones a 14, caracterizado porque comprende una interfaz de usuario (140) que comprende una pluralidad de selectores 10 de ajuste de parámetros de gestión de dicho bloque de control (110) .
Patentes similares o relacionadas:
Procedimiento y disposición para monitorizar el estado de conducción de un vehículo y vehículo con una disposición de este tipo, del 15 de Abril de 2020, de Siemens Mobility GmbH: Procedimiento para monitorizar el estado de conducción de un vehículo, en particular de un vehículo ferroviario, en el que se capta una señal de número de revoluciones […]
Motocicleta, del 4 de Marzo de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Una motocicleta con una fuente de potencia de accionamiento , una sección de control de fuente de potencia de accionamiento (22d, 220d), una rueda delantera […]
Vehículo incluyendo un dispositivo de control de tracción, del 8 de Mayo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo incluyendo: un motor incluyendo un dispositivo de encendido , un dispositivo de inyección de combustible , y una válvula de mariposa electrónicamente […]
Sistema de control de potencia de accionamiento y vehículo equipado con un sistema de control de potencia de accionamiento, del 13 de Marzo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un sistema de control de fuerza de accionamiento para uso en un vehículo, incluyendo el vehículo una fuente de accionamiento , una rueda motriz a mover por […]
Sistema de tracción y un método para controlar dicho sistema de tracción, del 6 de Julio de 2016, de VOLVO LASTVAGNAR AB: Un método para controlar un sistema de tracción para un vehículo de carretera pesado, comprendiendo dicho sistema de tracción : - un primer el sistema de propulsión […]
 Procedimiento y sistema para controlar un grupo motopropulsor de un vehículo, del 2 de Julio de 2014, de VOLVO LASTVAGNAR AB: Un sistema de grupo motopropulsor para un vehículo que comprende un embrague principal automático , una caja de cambios escalonada y una unidad […]
Procedimiento y sistema para controlar un grupo motopropulsor de un vehículo, del 2 de Julio de 2014, de VOLVO LASTVAGNAR AB: Un sistema de grupo motopropulsor para un vehículo que comprende un embrague principal automático , una caja de cambios escalonada y una unidad […]
 Motocicleta, del 14 de Marzo de 2012, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Una motocicleta que comprende:
una fuente motriz (10a);
una rueda accionada por la fuente motriz (10a);
una rueda accionada ; y
caracterizada por;
una […]
Motocicleta, del 14 de Marzo de 2012, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Una motocicleta que comprende:
una fuente motriz (10a);
una rueda accionada por la fuente motriz (10a);
una rueda accionada ; y
caracterizada por;
una […]
VEHÍCULO ELÉCTRICO Y DISPOSITIVO Y PROCEDIMIENTO PARA CONTROLAR SU DERRAPE, del 19 de Diciembre de 2011, de MITSUBISHI HEAVY INDUSTRIES, LTD.: Dispositivo de control de derrape de un vehículo eléctrico que tiene un par de motores izquierdo y derecho para accionar independientemente las ruedas […]