Procedimiento de transmisión de información de posición de un mapa digital y aparato utilizado para el procedimiento.
Sistema para identificar una posicion de un area especifica, que se especifica en un primer mapa digitalalmacenado en un aparato de transmision,
en un segundo mapa digital almacenado en un aparato de recepcion ydiferente de dicho primer mapa digital, comprendiendo el sistema:
el aparato de transmision que incluye:
una unidad de generacion de informacion de posicion que genera informacion de posicion que comprendedatos de coordenadas de un primer conjunto de nodos, en el que los nodos estan situados a lo largo del limitedel area especifica en el primer mapa digital,
una unidad de transmision que transmite la informacion de posicion generada al aparato de recepcion, yel aparato de recepcion que incluye:
una unidad de recepcion que recibe la informacion de posicion;
una unidad de identificacion que identifica posiciones de nodos en el segundo mapa digital, cada una de lasposiciones de los nodos correspondiendo a cada nodo cuyos datos de coordenadas se incluyen en lainformacion de posicion recibida e identifica un segundo conjunto de posiciones de nodos identificados comola posicion del area especifica.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10181076.
Solicitante: PANASONIC CORPORATION.
Nacionalidad solicitante: Japón.
Dirección: 1006, OAZA KADOMA KADOMA-SHI OSAKA 571-8501 JAPON.
Inventor/es: ADACHI, SHINYA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01C21/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01C MEDIDA DE DISTANCIAS, NIVELES O RUMBOS; TOPOGRAFIA; NAVEGACION; INSTRUMENTOS GIROSCOPICOS; FOTOGRAMETRIA O VIDEOGRAMETRIA (medida del nivel de líquidos G01F; radio navegación, determinación de la distancia o velocidad mediante la utilización de efectos de propagación, p. ej. efecto Doppler, tiempo de propagación, de ondas de radio, disposiciones análogas que utilicen otras ondas G01S). › Navegación; Instrumentos de navegación no previstos en los grupos G01C 1/00 - G01C 19/00 (medida de la distancia recorrida sobre el suelo por un vehículo G01C 22/00; control de la posición, curso, altitud o actitud de vehículos G05D 1/00; sistemas de control de tráfico para vehículos rodados incluyendo transmisiones de tráfico de instrucciones de navegación para vehículos controlados G08G 1/0968).
- G08G1/137 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › teniendo el indicador forma de mapa.
- G09B29/00 G […] › G09 ENSEÑANZA; CRIPTOGRAFIA; PRESENTACION; PUBLICIDAD; PRECINTOS. › G09B MATERIAL EDUCATIVO O DE DEMOSTRACION; MEDIOS DE ENSEÑANZA O DE COMUNICACION DESTINADOS A LOS CIEGOS, SORDOS O MUDOS; MODELOS; PLANETARIOS; GLOBOS; MAPAS GEOGRAFICOS; DIAGRAMAS. › Mapas (mapas celestes G09B 27/04 ); Planos; Gráficos; Trayectorias, p. ej. trazado de carreteras.
PDF original: ES-2394306_T3.pdf
Fragmento de la descripción:
Procedimiento de transmisión de información de posición de un mapa digital y aparato utilizado para el procedimiento 5
<Campo técnico>
La presente invención se refiere a un procedimiento de transmisión de información de posición de un mapa digital y a un aparato utilizado para el procedimiento, en particular, que permite transmitir una posición en un mapa digital de forma eficaz y precisa.
<Técnica Anterior>
En los últimos años, los vehículos montados con un aparato de navegación montado en el vehículo han aumentado rápidamente. El aparato de navegación montado en el vehículo mantiene una base de datos de un mapa digital y muestra atascos de tráfico o la posición de accidentes de tráfico en el mapa sobre la base de la información de los atascos de tráfico o información de accidentes de tráfico proporcionada desde un centro de información de tráfico o similar, además, ejecuta la búsqueda de rutas añadiendo esta información a dichas condiciones.
Aunque la base de datos del mapa digital está formada por varias compañías en Japón, debido a una diferencia en los dibujos y la tecnología básica de digitalización, el mapa de datos incluye errores y los errores difieren por los mapas digitales de las respectivas compañías.
En el caso de la transmisión, por ejemplo, de una posición de un accidente de tráfico mediante la información de tráfico o similar, cuando los datos de longitud y latitud de la posición se proporcionan por sí mismos, de acuerdo con el aparato montado en el vehículo, existe la preocupación que una posición en una carretera diferente se identifique como la posición del accidente de tráfico, dependiendo del tipo de la base de datos del mapa digital.
Para mejorar dicha inexactitud de transmisión de información, convencionalmente, se define un número de nodo en un nodo tal como un cruce presente en una red de carreteras, además, se define un número de enlace para un enlace que representa una carretera entre los nodos, de acuerdo con la base de datos del mapa digital de las respectivas compañías, respectivos cruces y respectivas carreteras se almacenan en correspondencia con el número de nodos y el números de enlaces, además, en la información de tráfico, se especifica una carretera mediante un número de enlace y un punto en la carretera se muestra mediante un procedimiento de expresión que indica unos pocos metros desde su encabezado.
Sin embargo, un número de nodo o un número de enlace definido en una red de carreteras tiene que cambiar a un nuevo número de acuerdo con las nuevas carreteras o que cambian, además, cuando un número de nodo o un número de enlace ha cambiado, los datos del mapa digital de la respectivas compañías deben ser actualizados. Por lo tanto, de acuerdo con un sistema de transmisión de información de posición de un mapa digital mediante el uso de un número de nodo o un número de enlace, es necesario un enorme coste social para su mantenimiento.
Para mejorar este punto, los inventores de la invención han propuesto, en la Solicitud de Patente Japonesa Nº. 214068/1999, un sistema en el que para transmitir una posición de la carretera, una información que proporciona un 45 lado que transmite “datos de la forma de la carretera" que comprenden una serie de coordenadas que indican una forma de la carretera de un tramo de carretera que tiene una longitud predeterminada, incluyendo la posición de de la carretera y los "datos de posición relativa” que indican la posición de la carretera en la sección de carretera representada por los datos de la forma de la carretera y un lado de recepción de la información especifica la sección de carretera sobre un mapa digital mediante la ejecución de coincidencia de mapas mediante el uso de datos de la forma de la carretera y especifica la posición de la carretera en la sección de carretera mediante el uso de los datos de posición relativa, además, los inventores han propuesto, en la Solicitud de Patente Japonesa Nº. 242166/1999, un sistema de transmisión también de "información adicional", tal como un tipo de carretera, número de la carretera, una serie de enlaces cruzados de nodos, ángulos de enlaces cruzados, nombre de cruces, etc. en una sección de carretera, de manera que el mapa coincidente en el lado de recepción puede ejecutarse con precisión, incluso 55 cuando una cantidad de datos de transmisión de los "datos de la forma de la carretera" es reducida, además, propone un sistema de disminución de la cantidad de datos de transmisión de los "datos de la forma de la carretera" dentro de un intervalo, de manera que no se provoca una coincidencia errónea en el lado de recepción.
En este caso, la coincidencia del mapa en el lado de recepción se realiza, por ejemplo, de la siguiente manera.
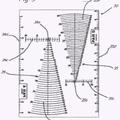
Tal como se muestra en la figura 45, cuando los "datos de la forma de la carretera" que representan una forma de carretera de una carretera provocan atascos de tráfico en la sección A a B, los datos de longitud y latitud de los puntos P0 (x0, y0) , P1 (x1, y1) , Pk (xk, yk) se transmiten como sigue,
tal como se muestra en la figura 44, el lado de recepción selecciona carreteras incluidas en un intervalo de error de centrado del punto P0 (x0, y0) utilizando los datos del mapa leídos de una base de datos de mapa digital propio como candidatos y estrecha los candidatos entre los mismos mediante el uso de la "información adicional" transmitida. Cuando se estrecha a un candidato único, se calculan las posiciones más próximas a (x0, y0) y (xk, yk) de la carretera y la sección se define como una sección de carretera representada por los "datos de la forma de la carretera".
Cuando el candidato único no se estrecha y las carreteras Q y R permanecen como candidatos, se calculan las posiciones Q0 y Ro en las respectivas carreteras candidatas más próximas a P0 (x0, y0) y se calculan las distancias entre P0 yQ0 y de P0 a R0. La operación se ejecuta para los respectivos puntos P1 (x1, y1) …, Pk (xk, yk) . Se calcula una sección de carretera que minimiza un valor producido mediante la adición de promedios cuadrados de las distancias desde los respectivos puntos P0, P1, …, Pk y la sección de carretera se especifica mediante un procedimiento de determinación de la sección de carretera como una sección de carretera representada por los "datos de la forma de la carretera".
La sección de atasco de tráfico de A a B se especifica sobre la base de los “datos de la posición relativa” transmitidos con una posición de inicio de la sección de carretera calculada a partir de los "datos de la forma de la carretera" como inicio.
Cuando la información de la posición en un mapa digital se transmite mediante la información de tráfico o similar, es necesario transmitir datos de manera que una posición correcta pueda ser reconocida por una parte contraria en un corto período de tiempo.
Además, como un caso de transmisión de información de posición en un mapa digital, se asume un caso de transmisión de información de un sitio de desastre en las montañas o un accidente en ríos y, por lo tanto, también es necesario transmitir una forma de mapa diferente de las carreteras o información de posición de un punto que no es una carretera.
La invención responde a estos problemas y es un objeto de la misma proporcionar un procedimiento de transmisión de información de posición de un mapa digital para mejorar aún más un procedimiento de transmisión de información de posición de un mapa digital mediante el uso de "datos de la forma” especificando una forma de mapa en el mapa digital y "datos de la posición relativa" que especifican una posición relativa en la forma de mapa especificada por los "datos de la forma", capaces de transmitir una posición en el mapa digital de una forma eficiente y precisa, además, capaces de transmitir también información de posición que no sea una forma de carretera de un punto en una carretera, además, proporcionando un aparato utilizado para ello.
La publicación de patente europea EP A 0 921 509 se refiere a una base de datos geográfica que se ha mejorado con los datos sobre las características físicas que describen la estructura de la carretera física o los objetos identificados en la trayectoria de una carretera. La publicación se refiere a la obtención de las posiciones de muchos tipos de puntos de referencia tales como señales, pilares, y otras estructuras permanentes. Se describe que estos puntos de referencia pueden ser identificados en la trayectoria de un vehículo mediante dispositivos sensores, que estos puntos de referencia pueden confundir los dispositivos de sensores y, por lo tanto, es útil tener... [Seguir leyendo]
Reivindicaciones:
1. Sistema para identificar una posición de un área específica, que se especifica en un primer mapa digital
almacenado en un aparato de transmisión, en un segundo mapa digital almacenado en un aparato de recepción y 5 diferente de dicho primer mapa digital, comprendiendo el sistema:
el aparato de transmisión que incluye:
una unidad de generación de información de posición que genera información de posición que comprende datos de coordenadas de un primer conjunto de nodos, en el que los nodos están situados a lo largo del límite del área específica en el primer mapa digital, una unidad de transmisión que transmite la información de posición generada al aparato de recepción, y
el aparato de recepción que incluye:
una unidad de recepción que recibe la información de posición; una unidad de identificación que identifica posiciones de nodos en el segundo mapa digital, cada una de las posiciones de los nodos correspondiendo a cada nodo cuyos datos de coordenadas se incluyen en la información de posición recibida e identifica un segundo conjunto de posiciones de nodos identificados como la posición del área específica.
2. Sistema según la reivindicación 1, en el que la información de posición comprende un código de identificación que expresa el contenido del área específica.
3. Sistema según la reivindicación 1 ó 2, en el que el primer conjunto de nodos comprende un nodo superior, y una posición en la que se produce un evento se define mediante la distancia relativa desde el nodo superior.
4. Aparato de transmisión que almacena un primer mapa digital, mediante el cual se especifica un área específica en el primer mapa digital, comprendiendo el aparato de transmisión:
una unidad de generación de información de posición que genera información de posición que comprende datos de coordenadas de un primer conjunto de nodos, en el que los nodos están situados a lo largo del límite del área específica en el primer mapa digital, una unidad de transmisión que transmite la información de posición generada al aparato de recepción.
5. Aparato de transmisión según la reivindicación 4, en el que la información de posición comprende un código de identificación que expresa el contenido del área específica.
6. Aparato de transmisión según la reivindicación 4 ó 5, en el que el primer conjunto de nodos comprende un nodo superior, y una posición en la que se produce un evento se define mediante la distancia relativa desde el nodo superior.
7. Procedimiento para identificar una posición de un área específica, que se especifica en un primer mapa digital
almacenado en un aparato de transmisión, en un segundo mapa digital almacenado en un aparato de recepción y 45 diferente de dicho primer mapa digital, comprendiendo el procedimiento:
en el aparato de transmisión:
generar información de posición que comprende datos de coordenadas de un primer conjunto de nodos, en el que los nodos están situados a lo largo del límite del área específica en el primer mapa digital, transmitir la información de posición generada al aparato de recepción, y
en el aparato de recepción:
recibir la información de posición; identificar las posiciones de los nodos en el segundo mapa digital, correspondiente cada una de las posiciones de los nodos a cada nodo cuyos datos de coordenadas se incluyen en la información de la posición recibida e identificar un segundo conjunto de posiciones de nodos identificados como la posición del área específica.
8. Procedimiento para transmitir información de posición a un aparato de transmisión que almacena un primer mapa digital, con lo cual un área específica se especifica en el primer mapa digital, comprendiendo el procedimiento:
generar información de posición que comprende datos de coordenadas de un primer conjunto de nodos, en el 65 que los nodos están situados a lo largo del límite del área específica en el primer mapa digital, transmitir la información de posición generada.
9. Procedimiento según la reivindicación 7 u 8, en el que la información de posición comprende un código de identificación que expresa el contenido del área específica.
10. Procedimiento según la reivindicación 7, 8 ó 9, en el que el primer conjunto de nodos comprende un nodo superior, y una posición en la que se produce un evento se define mediante la distancia relativa desde el nodo superior.
Patentes similares o relacionadas:
Procedimiento y aparato para la presentación optimizada de mapas complejos, del 6 de Marzo de 2019, de QUALCOMM INCORPORATED: Un procedimiento para la presentación optimizada del mapa que comprende: recibir, en un dispositivo móvil, un primer conjunto de datos […]
CARTA SOLAR TRIDIMENSIONAL UNIVERSAL, del 17 de Mayo de 2018, de UNIVERSIDAD DE ALICANTE: Carta solar tridimensional universal que permite el estudio del soleamiento de la tierra y que comprende una pieza fija y una pieza móvil, donde la […]
Procedimiento de generación de información de tráfico, aparato de generación de información de tráfico, sistema de navegación, de visualización y unidad electrónica de control, del 31 de Mayo de 2017, de TOYOTA JIDOSHA KABUSHIKI KAISHA: Un procedimiento de generación de información de tráfico para generar información de tráfico acerca de una carretera en la que viaja un vehículo , comprendiendo el procedimiento: […]
CARTA SOLAR TRIDIMENSIONAL UNIVERSAL, del 11 de Abril de 2017, de UNIVERSIDAD DE ALICANTE: 1. Carta solar tridimensional universal caracterizada por comprender una pieza fija y una pieza móvil, donde la pieza fija es una plataforma graduada circular con […]
 Guía para campo golf, del 9 de Febrero de 2016, de Ulrich, Franz: Guía para campo de golf con planos de información fieles a la escala de las calles individuales para la orientación sobre las peculiaridades y […]
Guía para campo golf, del 9 de Febrero de 2016, de Ulrich, Franz: Guía para campo de golf con planos de información fieles a la escala de las calles individuales para la orientación sobre las peculiaridades y […]
 Anotación automatizada de una vista, del 2 de Febrero de 2016, de QUALCOMM INCORPORATED: Un procedimiento informatizado para anotar un elemento de una imagen de una vista de una secuencia de vídeo, que comprende las etapas de:
(a) obtener una identificación […]
Anotación automatizada de una vista, del 2 de Febrero de 2016, de QUALCOMM INCORPORATED: Un procedimiento informatizado para anotar un elemento de una imagen de una vista de una secuencia de vídeo, que comprende las etapas de:
(a) obtener una identificación […]
Procedimiento para la determinación de las coordenadas geográficas de píxeles en imágenes SAR, del 3 de Diciembre de 2014, de Airbus Defence and Space GmbH: Procedimiento para la determinación aeroasistida de las coordenadas geográficas de píxeles correspondientes a partir de imágenes de radar de abertura sintética digital, […]
Mapas adaptados para personas ciegas y deficientes visuales, del 26 de Mayo de 2014, de ORGANIZACION NACIONAL DE CIEGOS ESPAÑOLES (ONCE): 1. Mampara adaptados para personas ciegas y deficientes visuales de cualquier tamaño, forma, diseño, color y orientación, caracterizados porque incorporan marcas táctiles […]