Máquinas herramienta y procedimientos de operación de las mismas.
Una máquina herramienta que comprende:
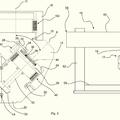
una base de máquina (10);
un primer soporte (200) previsto en un primer eje de rotación de la máquina, estando montado el primer eje de rotación de la máquina en la base en una posición fija respecto a la base;
un segundo soporte (202) previsto en un segundo eje de rotación de la máquina, estando montado el segundo eje de rotación de la máquina en la base en una posición fija respecto a la base, en el que el eje de rotación del segundo eje de rotación de la máquina es paralelo y está separado lateralmente del eje de rotación del primer eje de rotación de la máquina;
una fijación realizada mediante un brazo de soporte (208) en el segundo soporte; y
una disposición de control operable para controlar la orientación del primer soporte respecto al eje de rotación del primer eje de rotación de la máquina, la orientación del segundo soporte respecto al eje de rotación del segundo eje de rotación de la máquina, caracterizada porque
el brazo de soporte es desplazable respecto al segundo soporte alrededor de un eje giratorio (210), con la fijación separada del eje giratorio mediante el brazo de soporte; y
la disposición de control es operable para controlar también la posición de rotación de la fijación alrededor del eje giratorio, para gobernar la posición y la orientación del primer soporte y la fijación entre sí.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/GB2010/052155.
Solicitante: CINETIC LANDIS LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: Eastburn Works Skipton Road Cross Hills Keighley, Yorkshire BD20 7SD REINO UNIDO.
Inventor/es: STOCKER,MARK.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q1/36 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 1/00 Elementos componentes de la estructura general de un tipo de máquina, y más especialmente los elementos fijos más grandes (B23Q 37/00 tiene prioridad). › Resortes.
- B23Q1/54 B23Q 1/00 […] › con sólo dos pares de rotación.
- B24B19/00 B […] › B24 TRABAJO CON MUELA; PULIDO. › B24B MAQUINAS, DISPOSITIVOS O PROCEDIMIENTOS PARA TRABAJAR CON MUELA O PARA PULIR (por electroerosión B23H; tratamiento por chorro abrasivo B24C; grabado o pulido electrolítico C25F 3/00 ); REAVIVACION O ACONDICIONAMIENTO DE SUPERFICIES ABRASIVAS; ALIMENTACION DE MAQUINAS CON MATERIALES DE RECTIFICAR, PULIR O ALISAR. › Máquinas o dispositivos concebidos especialmente para una operación particular de trabajo con muela no cubierta por otro grupo principal (trabajo con muela de roscas de tornillo B23G 1/36).
PDF original: ES-2443161_T3.pdf
Fragmento de la descripción:
Máquinas herramienta y procedimientos de operación de las mismas
Campo de la invención La presente invención se refiere a máquinas herramienta y en particular, a la reducción de errores de alineación en tales herramientas.
Antecedentes de la invención Hay muchas aplicaciones para máquinas herramientas que requieren el control del movimiento de dos puntos en el espacio entre sí, en la posición y el ángulo, sobre un área o volumen de barrido. Es deseable minimizar el número de ejes de máquina implicados para optimizar este control. También es deseable mantener un bucle de rigidez muy apretado entre los dos puntos y lo ideal sería un valor constante de rigidez en el bucle cuando se ajustan la posición y el ángulo de los puntos. Esto mejora el nivel de precisión y la capacidad de repetición del movimiento.
Las máquinas herramientas existentes a menudo usan largos raíles de guía lineales para permitir el contacto entre una herramienta de corte (tal como una rueda de pulido) y una pieza de trabajo en cualquier posición a lo largo de la longitud de la pieza de trabajo. Raíles de guía lineales más cortos pueden ser llevados por los raíles largos para facilitar el movimiento de una herramienta de corte hacia o alejándose de la pieza de trabajo, en una dirección ortogonal a los raíles largos. Estos raíles (o ejes) apilados introducen un cumplimiento no deseado, reduciendo la rigidez de la herramienta al componente. Esto a su vez conduce a la reducción de la calidad de los componentes, en términos de su precisión dimensional y acabado. Además, los largos raíles de guía lineales típicamente tienen que ser al menos tan largos como la pieza de trabajo a mecanizar. Esto a menudo resulta en un eje con una pobre relación de soporte, donde el eje es más compatible en la dirección de la fuerza de corte. Este problema se agrava cuando un eje de alimentación ortogonal se apila sobre el eje largo.
El uso de ejes apilados también es problemático si se emplean codificadores de posición en el eje. Cuanto más alto sea la pila de ejes, mayor es la distancia entre los puntos de interés y los codificadores. Esto da lugar a errores de “desplazamiento Abbe”, que reducen la precisión intrínseca de las máquinas herramientas.
Además, el uso de ejes lineales ortogonales apilados requiere alineación que lleva mucho tiempo y es costosa para mantener la ortogonalidad entre los ejes y para minimizar los errores de alabeo, guiñada y cabeceo para cada eje.
Estos ejes lineales largos también requieren cubiertas telescópicas largas que son caras, introducen fricción, tienen tendencia a fallar y además, pueden influir en la precisión del movimiento lineal (por ejemplo, su rectitud, precisión de posicionamiento y capacidad de repetición) .
La presente invención busca superar los problemas anteriores asociados con el uso de raíles de guía largos y reducir la necesidad de ejes ortogonales apilados.
La publicación internacional n.º: WO2009/093064 (a nombre del presente solicitante) describe una máquina herramienta que comprende una base de máquina, un primer soporte montado sobre un primer eje de rotación de la máquina sobre la base y un segundo soporte montado en un segundo eje de rotación de la máquina sobre la base. El segundo eje de rotación es paralelo y está separado lateralmente del primer eje de rotación y lleva una fijación móvil con relación al segundo soporte a lo largo de un primer eje lineal de la máquina ortogonal al segundo eje de rotación. Se proporciona una disposición de control que es operable para controlar la orientación del primer soporte sobre el primer eje de rotación y la orientación de la fijación en relación al segundo eje de rotación y su posición a lo largo del eje lineal, para gobernar así la posición y la orientación del primer soporte y de la fijación entre sí. Esto se puede lograr sin necesidad de ejes lineales largos y un eje lineal apilado, superando así los problemas asociados con las configuraciones conocidas descritas anteriormente.
El documento US 5.231.587 describe un aparato de generación de lentes que utiliza el movimiento giratorio de los componentes sin un sistema de manera lineal. Incluye un husillo de soporte de herramienta que está soportado de forma giratoria sobre la base de la máquina, junto con un husillo de pieza de trabajo que también está soportado de manera giratoria en la base de la máquina.
Sumario de la invención La presente invención se refiere a una máquina herramienta que comprende: una base de máquina; un primer soporte previsto en un primer eje de rotación de la máquina, estando montado el primer eje de rotación de la máquina en la base en una posición fija respecto a la base; un segundo soporte previsto en un segundo eje de rotación de la máquina, estando montado el segundo eje de
rotación de la máquina en la base en una posición fija respecto a la base, en el que el eje de rotación del segundo eje de rotación de la máquina es paralelo y está separado lateralmente del eje de rotación del primer eje de rotación de la máquina; una fijación llevada por un brazo de soporte sobre el segundo soporte; y una disposición de control operable para controlar la orientación del primer soporte con relación al eje de rotación del primer eje de rotación de la máquina y la orientación del segundo soporte respecto al eje de rotación del segundo eje de rotación de la máquina.
Según la invención, el brazo de soporte es móvil con relación al segundo soporte alrededor de un eje giratorio, con la fijación separada del eje de giratorio mediante el brazo de soporte; y la disposición de control es operable para controlar también la posición de rotación de la fijación alrededor del eje giratorio, para gobernar la posición y la orientación del primer soporte y de la fijación entre sí.
Esta configuración proporciona beneficios asociados con las realizaciones descritas en el documento WO2009/093064, que se derivan de la provisión de dos ejes de rotación de la máquina proporcionados a una distancia fija. Se diferencia porque el movimiento de la fijación en relación con el segundo soporte es alrededor de un eje giratorio, con la fijación separada del eje rotatorio mediante un brazo de soporte, en lugar de que la fijación sea desplazable con relación al segundo soporte a lo largo de un eje lineal de la máquina.
Como se describe en el documento WO2009/093064, la combinación de dos ejes de rotación de la máquina y un eje lineal de la máquina facilita el control versátil de las orientaciones relativas del primer soporte y una fijación en el segundo soporte sobre un área de barrido. El componente lineal de movimiento en un plano perpendicular al primer y segundo ejes de rotación combina ventajosamente con su movimiento de rotación para, por ejemplo, permitir el pulido de superficies cilíndricas mediante una máquina de pulido que contiene este concepto.
El autor de la invención se ha dado cuenta que el grado de libertad ofrecido por el eje lineal de la máquina en realidad podría facilitarse en su lugar mediante un eje giratorio adicional, obviando así la necesidad de un eje lineal para esta función. Con un control apropiado mediante la disposición de control, la rotación de la fijación alrededor de su eje se puede lograr utilizando una disposición de accionamiento asociada para proporcionar el componente lineal requerido de movimiento de la fijación en relación al primer soporte. Por lo tanto, en algunas realizaciones, la máquina herramienta solo emplea estos tres ejes rotativos, facilitando de este modo el movimiento relativo entre el primer soporte y la fijación, mientras se reduce la susceptibilidad a los errores de alineación.
El uso de un tercer eje giratorio en lugar de un eje lineal significa que los tres ejes pueden ser ejes rotativos que se pueden sellar usando laberintos que no introducen fuerzas de fricción. Esto está en contraste con la protección contra el deslizamiento lineal o cobertura exigida por un eje lineal. Estos protectores o coberturas tienden a ser pesados, caros e introducen fuerzas de fricción no repetibles.
Además, el uso de un tercer eje giratorio es probable que signifique que una masa más pequeña se mueva para crear el componente lineal del movimiento deseado. Cuando se emplea un eje lineal, una masa relativamente grande que incluye la corredera que se mueve a lo largo del eje se mueve a través del segundo eje de soporte, lo que altera el momento polar de inercia del segundo conjunto de soporte en mayor medida. Esto a su vez puede requerir que los bucles servo del eje giratorio se "afinen" para evitar la inestabilidad servo en todo el intervalo de las inercias polares.... [Seguir leyendo]
Reivindicaciones:
1. Una máquina herramienta que comprende: una base de máquina (10) ; un primer soporte (200) previsto en un primer eje de rotación de la máquina, estando montado el primer eje de rotación de la máquina en la base en una posición fija respecto a la base; un segundo soporte (202) previsto en un segundo eje de rotación de la máquina, estando montado el segundo eje de rotación de la máquina en la base en una posición fija respecto a la base, en el que el eje de rotación del segundo eje de rotación de la máquina es paralelo y está separado lateralmente del eje de rotación del primer eje de rotación de la máquina; una fijación realizada mediante un brazo de soporte (208) en el segundo soporte; y una disposición de control operable para controlar la orientación del primer soporte respecto al eje de rotación del primer eje de rotación de la máquina, la orientación del segundo soporte respecto al eje de rotación del segundo eje de rotación de la máquina,
caracterizada porque el brazo de soporte es desplazable respecto al segundo soporte alrededor de un eje giratorio (210) , con la fijación separada del eje giratorio mediante el brazo de soporte; y la disposición de control es operable para controlar también la posición de rotación de la fijación alrededor del eje giratorio, para gobernar la posición y la orientación del primer soporte y la fijación entre sí.
2. Una máquina herramienta de la reivindicación 1, en la que el eje giratorio es ortogonal al eje de rotación del segundo eje de rotación de la máquina.
3. Una máquina herramienta de la reivindicación 1, en la que el eje giratorio es paralelo al eje de rotación del segundo eje de rotación de la máquina.
4. Una máquina herramienta de cualquier reivindicación anterior, en la que las posiciones de rotación de los soportes se pueden bloquear selectivamente con relación a la base de la máquina.
5. Una máquina herramienta de cualquier reivindicación anterior, en la que cada soporte incluye un sensor de rotación para proporcionar una señal relacionada con la posición de rotación del respectivo soporte con relación a la base de la máquina y la disposición de control es operable para recibir las señales desde los sensores de rotación y para compensar la imprecisión en el movimiento de los soportes durante una operación de mecanizado.
6. Una máquina herramienta de cualquier reivindicación anterior, en la que el movimiento del brazo de soporte respecto al segundo soporte alrededor del eje de rotación se proporciona mediante un cojinete giratorio.
7. Una máquina herramienta de cualquiera de las reivindicaciones 1 a 5, en la que el movimiento del brazo de soporte respecto al segundo soporte alrededor del eje de rotación se proporciona mediante una junta flexible.
8. Una máquina herramienta de la reivindicación 7, en la que la junta flexible es desplazable con relación a la base a lo largo de un eje lineal paralelo a la base.
9. Una máquina herramienta de cualquier reivindicación anterior, en la que dos fijaciones de herramientas se llevan mediante uno de los soportes, siendo cada una desplazable con relación al soporte independientemente del otro y cada fijación de la herramienta se lleva mediante un respectivo brazo de soporte en el segundo soporte, siendo cada brazo de soporte independientemente desplazable respecto al segundo soporte alrededor de un eje de rotación respectivo.
10. Una máquina herramienta de cualquiera de la reivindicación 9, en la que al menos una de las fijaciones de la herramienta es también desplazable con relación a un soporte a lo largo de un eje lineal.
11. Una máquina herramienta de cualquier reivindicación anterior, en la que la base de la máquina comprende un soporte central situado entre los ejes de la máquina y los ejes de la máquina están montados en lados opuestos del soporte.
12. Un procedimiento de mecanizado de una pieza de trabajo utilizando una máquina herramienta según cualquier reivindicación anterior, que comprende las etapas de:
(a) montar una pieza de trabajo en uno de los soportes;
(b) montar una herramienta de corte en el otro soporte;
(c) rotar los soportes para presentar una porción seleccionada de la pieza de trabajo a la herramienta de corte; y
(d) mecanizar la porción seleccionada de la pieza de trabajo con la herramienta de corte.
13. Un procedimiento de la reivindicación 12, que incluye las etapas adicionales de:
(e) rotar los soportes en direcciones opuestas y mover la pieza de trabajo y/o la herramienta de corte en relación con
el respectivo soporte para acoplar una segunda porción de la pieza de trabajo con la herramienta de corte; y
(f) mecanizar la segunda porción de la pieza de trabajo con la herramienta de corte.
14. Un procedimiento de mecanizado de una pieza de trabajo usando una máquina herramienta de cualquiera de las reivindicaciones 1 a 11, que comprende las etapas de:
(a) montar una pieza de trabajo que tiene un eje longitudinal sobre uno de los soportes;
(b) montar una rueda de pulido en el otro soporte;
(c) rotar el otro soporte de tal manera que el eje de rotación de la rueda de pulido no sea paralela respecto al eje longitudinal de la pieza de trabajo; y
(d) pulir la pieza de trabajo con la rueda de pulido con el eje de rotación de la rueda de pulido en un ángulo respecto al eje longitudinal de la pieza de trabajo.
15. Un procedimiento de la reivindicación 12, en el que la herramienta tiene un eje de referencia, el primer soporte se mueve respecto al eje de rotación del primer eje de rotación de la máquina, el segundo soporte se mueve respecto al eje de rotación del segundo eje de rotación de la máquina y la fijación se mueve con relación al eje giratorio, de tal manera que un perfil predeterminado se mecaniza en la pieza de trabajo mediante la herramienta mientras se mantiene el eje de referencia de la herramienta perpendicular a dicho perfil.
16. Un procedimiento de calibración de una máquina herramienta de cualquiera de las reivindicaciones 1 a 11, que comprende las etapas de:
(a) montar una fuente de luz láser en uno de los soportes;
(b) emitir un rayo láser desde la fuente de luz que sea incidente sobre un dispositivo óptico soportado por el otro soporte;
(c) monitorizar la trayectoria del rayo láser respecto a las posiciones de los soportes según lo medido mediante respectivos sensores de rotación;
(d) calcular los errores de posicionamiento; y
(e) calibrar la disposición de control para reducir los errores.
Patentes similares o relacionadas:
Máquina herramienta, del 11 de Marzo de 2020, de Hüttmann, Martin: Máquina herramienta para el mecanizado de piezas de trabajo controlado por ordenador, con un soporte de máquina y al menos dos dispositivos […]
Amortiguador de masa ajustado montado sobre cabezal simétrico, del 27 de Noviembre de 2019, de Fives Machining Systems, Inc: Un amortiguador de masa ajustado montado en un cabezal de máquina herramienta , montado sobre el extremo de un brazo que tiene una […]
Máquina herramienta para la mecanización por arranque de virutas de una pieza de trabajo así como conjunto de soporte de husillo para el empleo en una máquina herramienta de este tipo, del 6 de Noviembre de 2019, de DECKEL MAHO PFRONTEN GMBH: Conjunto de soporte de husillo para el empleo en una máquina herramienta, con: - una sección de alojamiento del brazo articulado que se puede disponer o bien […]
Cabezal de mecanización de giro doble, del 26 de Marzo de 2019, de C.M.S. S.P.A.: Cabezal de mecanización de giro doble con dos ejes controlados (C; A), que comprende: - una primera unidad de control de un primer […]
Máquina herramienta con sistema de amortiguación activa, del 6 de Febrero de 2019, de SORALUCE, S. COOP: Máquina herramienta con sistema de amortiguación activa, comprendiendo • un carnero que tiene una estructura prismática hueca con unas paredes longitudinales […]
 Máquina herramienta que comprende un cabezal de mecanizado, del 27 de Diciembre de 2018, de BRETON, S.P.A.: Máquina herramienta que comprende un manguito y un cabezal de mecanizado , comprendiendo dicho cabezal de mecanizado:
un primer cuerpo conectado al manguito […]
Máquina herramienta que comprende un cabezal de mecanizado, del 27 de Diciembre de 2018, de BRETON, S.P.A.: Máquina herramienta que comprende un manguito y un cabezal de mecanizado , comprendiendo dicho cabezal de mecanizado:
un primer cuerpo conectado al manguito […]
Manipulador de baja inercia para máquinas de corte láser para metales laminares planos, del 28 de Marzo de 2018, de SALVAGNINI ITALIA S.P.A.: Máquina de corte láser para metales laminares planos dispuestos en un plano horizontal, que comprende un cabezal de corte láser y un manipulador con un eje X de movimiento […]
Dispositivo para proporcionar aparatos de sujeción y/o de mecanizado y sistema, del 21 de Febrero de 2018, de ThyssenKrupp System Engineering GmbH: Dispositivo para proporcionar aparatos de sujeción y/o de mecanizado para un manipulador, en particular en una calle de fabricación para la fabricación de carrocerías […]