Instalación de plegado y procedimiento de plegado.
Instalación de plegado con al menos un manipulador (2) de varios ejes,
que mueve la herramienta de plegado (5)con relación a una pieza de trabajo (7), en la que en una o varias zonas de esquina (8) de la pieza de trabajo (7)está dispuesto un dispositivo de plegado de esquinas (10) con un accionamiento propio (26), caracterizada por queel manipulador (2) y el dispositivo de plegado de esquinas (10) están acoplados de acuerdo con la técnica decontrol.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/005885.
Solicitante: KUKA SYSTEMS GMBH.
Nacionalidad solicitante: Alemania.
Dirección: BLÜCHERSTRASSE 144 86165 AUGSBURG ALEMANIA.
Inventor/es: KRAUS, JOHANN, MAISCHBERGER, JOHANN, MEMET,MOUSTAFA.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B21D19/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B21 TRABAJO MECANICO DE LOS METALES SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DEL METAL POR PUNZONADO. › B21D TRABAJO MECANICO O TRATAMIENTO DE CHAPAS, TUBOS, BARRAS O PERFILES METALICOS SIN ARRANQUE SUSTANCIAL DE MATERIAL; CORTE DE METALES POR PUNZONADO (trabajo mecánico o tratamiento de alambre B21F). › B21D 19/00 Conformación u otro tratamiento de los bordes, p. ej. de los bordes de los tubos. › en forma de rodillos.
- B21D39/02 B21D […] › B21D 39/00 Utilización de procedimientos que permitan el ensamblaje de objetos o de partes de objetos, p. ej. revestimiento con chapas, que no sea por chapado (remachado B21J; ensamblado de elementos por forjado o prensado al objeto de que formen una sola pieza B21K 25/00 ); Dispositivos de mandrinaje de tubos. › de chapas por doblado, p. ej. conectando los bordes de una chapa para formar un cilindro.
PDF original: ES-2429464_T3.pdf
Fragmento de la descripción:
Instalación de plegado y procedimiento de plegado La invención se refiere a una instalación de plegado y a un procedimiento de plegado con las características de la reivindicación principal 1 del dispositivo (ver, por ejemplo, el documento JP-A-02070325) así como a un procedimiento para el plegado de piezas de trabajo.
Se conocen por la práctica instalaciones de plegado en forma estacionaria con varias herramientas de plegado accionadas dispuestas fijas estacionarias en un lecho de plegado. Tales instalaciones de plegado son de estructura costosa y solamente son flexibles en una medida limitada.
Se conocen, además, por la práctica instalaciones de plegado con robot, en las que un manipulador, especialmente un robot de brazo articulado de varios ejes, guía una cabeza de plegado de rodillos frente a la pieza de trabajo fijada sobre el lecho de plegado. Las instalaciones de plegado con robot ofrecen una mayor flexibilidad, pero, por otraparte, tienen problemas en las zonas de la esquina de la trayectoria de plegado. Éstos pueden ser, por ejemplo, esquinas marginales de piezas de trabajo, en particular esquinas de puertas, esquinas de trampilla o similares. Por otra parte, aparecen zonas de esquina también en las llamadas líneas características, en las que la trayectoria de plegado se extiende transversalmente sobre un pandeo, una acanaladura o similar. En estas zonas de esquina, la trayectoria de plegado que debe seguirse con la cabeza de plegado de rodillos tiene curvaturas estrechas. Para poder seguir estas trayectorias con la cabeza de plegado de rodillos, el robot debe frenar fuertemente, aumentando fuertemente también el gasto de cálculo para el cálculo y control de la trayectoria de movimiento del robot.
El cometido de la presente invención es indicar una técnica de plegado mejorada.
La invención soluciona este cometido con las características de la reivindicación principal 1 del dispositivo y con las características de la reivindicación 13 del procedimiento. La combinación de un dispositivo de plegado de manipulador y de al menos un dispositivo de plegado de esquinas separado tiene la ventaja de que el proceso de plegado es flexible y se puede realizar con tiempos de proceso espacialmente cortos. A lo largo de las trayectorias de plegado rectas o débilmente curvadas, el proceso de plegado del manipulador con su herramienta de plegado se puede realizar con alta precisión y velocidad. En las zonas de esquinas, que incluyen también las esquinas o pandeos en las líneas características, los dispositivos de plegado de esquina pueden trabajar más rápidamente y con mayor precisión. Estos dispositivos de plegado de esquinas con preferencia estacionarios pueden doblar, además, el pliegue mejor y con mayor precisión a la forma y posición deseadas, debido a sus movimientos de ajuste dirigidos transversales o inclinados con respecto al desarrollo del pliegue. Los tiempos de proceso necesarios en las zonas de esquina pueden ser, además, esencialmente más cortos.
El manipulador puede saltar por encima o bien omitir estas zonas de esquina con la herramienta de plegado elevada y a continuación continuar su proceso de plegado. De esta manera, en las zonas de esquina pierde solamente poco tiempo, de manera que el proceso de plegado del manipulador puede terminado en un tiempo mínimo. De manera alternativa, son posibles formas mixtas, en particular en el caso de procesos de plegado de varias etapas. En este caso, en dichas zonas de esquina se pueden realizar por el dispositivo de plegado de esquinas una o varias etapas de transformación y de plegado, mientras que el manipulador ejecuta de la misma manera una o varias etapas detransformación y de plegado, por ejemplo la última etapa de plegado de la flexión plana. Ésta puede se runa etapa de transformación y de plegado, que puede ser realizada por el manipulador con una velocidad de la trayectoria relativamente alta y con poca pérdida de tiempo. La forma mixta simplifica, por otra parte, la estructura del dispositivo de plegado de esquinas, que puede estar configurado de manera correspondiente más sencillo y necesita un gasto menos de herramienta y de accionamiento.
Con la instalación de plegado reivindicada se pueden conseguir calidades óptimas de transformación y de plegado en combinación con tiempos cortos de proceso. Además, el gasto de construcción se puede mantener reducido. La flexibilidad puede ser alta, por otra parte, a través del empleo amplio del manipulador.
Para poder sincronizar de una manera óptima entre sí los diferentes procesos de plegado, se recomienda unacoplamiento técnico de control del manipulador y de uno o varios dispositivos de plegado de esquinas. Éstos pueden tener controles propios respectivos y pueden estar acoplados según la técnica de señales. Es más favorable un control común, en particular una incorporación del (los) dispositivo (s) de plegado de esquina en un control de manipulador o control de robot. Para la influencia sobre el control existen diferentes posibilidades. El dispositivo de plegado de esquina se puede controlar en función de los movimientos y/o de las funciones de plegado del manipulador. De esta manera se puede realizar un control continuo, en el que el dispositivo de plegado de esquinas recibe una señal de arranque cuando se alcanza una posición previamente programa de la trayectoria del manipulador. Por otra parte, con la herramienta de plegado guiada por manipulador se puede iniciar la flexión de la pestaña en la zona de esquina y se puede pre-deformar un poco, lo que facilita la función del dispositivo de plegado de esquinas. Además, es posible controlar, especialmente en procesos de plegado de varias etapas, el dispositivo de plegado de esquina y el manipulador en dependencia mutua. Esto es especialmente ventajoso para el modo mixto mencionado anteriormente.
La herramienta de plegado para el manipulador puede estar configurada de forma discrecional. Una cabeza de plegado de rodillos con varios rodillos de plegado tiene la ventaja de que se pueden realizar varias etapas de plegado con una herramienta. En este caso, además, es ventajoso disponer los rodillos de plegado en diferentes lados de la cabeza de plegado de rodillos y hacer intervenir en cada caso solamente a un rodillo de plegado. Esto optimiza el proceso de plegado y permite un plegado con rodillos hasta el final de la trayectoria de plegado prevista para ello. Esto es favorable, además, para la colaboración con un dispositivo de plegado de esquinas, para conseguir un plegado armónico.
Para una optimización de los procesos de plegado y de los tiempos de proceso es favorable, además, prever un accionamiento de rodillos, con el que el rodillo de plegado que se encuentra interviniendo es accionado con una velocidad sincronizada con el movimiento de avance realizado por el manipulador. El comportamiento de flexión y de laminación se mejora de esta manera y se puede adaptar de una manera óptima a las necesidades respectivas del proceso. El accionamiento de rodillos puede actuar sobre uno o varios rodillos de plegado y se puede incorporar de la misma manera en el control común.
El dispositivo de plegado de esquinas se puede adaptar a través de su zona de aplicación limitada de una manera óptima a los requerimientos respectivos del proceso. En particular, es posible trabajar con un accionamiento y con un solo tipo de mordazas de plegado, pudiendo conseguirse a través de un servomecanismo adecuado un movimiento de ajuste de varios ejes de la o de las mordazas de plegado.
En las reivindicaciones dependientes se indican otras configuraciones ventajosas de la invención.
La invención se representa en los dibujos de forma ejemplar y esquemática. En particular:
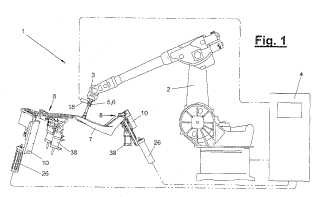
La figura 1 muestra un dispositivo de plegado con un manipulador con herramienta de plegado así como con varios dispositivos de plegado de esquinas estacionarios y con un control común en vista lateral.
La figura 2 muestra una vista en planta superior ampliada sobre una pieza de trabajo con varios dispositivos de plegado de esquinas y tensores.
La figura 3 muestra una vista lateral de la disposición de la figura 2.
Las figuras 4 a 6 muestran una cabeza de plegado de rodillos en diferentes vistas.
La figura 7 muestra una vista lateral parcialmente en sección de una primera variante de un dispositivo de plegado de esquinas en vista lateral.
La figura 8 muestra una vista en planta superior según la flecha VIII de la figura 7.
Las figuras 9 a 11 muestran etapas de desarrollo para el proceso de plegado del dispositivo de plegado de esquinas.
Las figuras 12 y 13 muestran una variante de un dispositivo de plegado de esquinas en posición de reposo y en posición de plegado.... [Seguir leyendo]
Reivindicaciones:
1. Instalación de plegado con al menos un manipulador (2) de varios ejes, que mueve la herramienta de plegado (5) con relación a una pieza de trabajo (7) , en la que en una o varias zonas de esquina (8) de la pieza de trabajo (7) está dispuesto un dispositivo de plegado de esquinas (10) con un accionamiento propio (26) , caracterizada por que el manipulador (2) y el dispositivo de plegado de esquinas (10) están acoplados de acuerdo con la técnica de control.
2. Instalación de plegado de acuerdo con la reivindicación 1, caracterizada por que el dispositivo de plegado de esquinas (10) está controlado en función de los movimientos o en función de las funciones de plegado del manipulador (2) .
3. Instalación de plegado de acuerdo con la reivindicación 1 ó 2, caracterizada por que el dispositivo de plegado de esquinas (10) y el manipulador (2) están controlados en dependencia mutua durante procesos de plegado de varias etapas.
4. Instalación de plegado de acuerdo con la reivindicación 1, 2 ó 3, caracterizada por que el manipulador (2) y el accionamiento (26) comprenden un control común o el dispositivo de plegado de esquinas (10) está conectado en el control del manipulador (4) .
5. Instalación de plegado de acuerdo con una de las reivindicaciones anteriores, caracterizada por que la herramienta de plegado (5) presenta uno o varios rodillos de plegado (15, 16, 17) .
6. Instalación de plegado de acuerdo con una de las reivindicaciones anteriores, caracterizada por que los rodillos de plegado (15, 16, 17) están dispuestos en lados diferentes de una herramienta de plegado (5) .
7. Instalación de plegado de acuerdo con una de las reivindicaciones anteriores, caracterizada por que la herramienta de plegado (5) presenta un accionamiento de rodillos (18) controlado.
8. Instalación de plegado de acuerdo con una de las reivindicaciones anteriores, caracterizada por que el accionamiento de rodillos (18) presenta un motor (19) y un mecanismo de transmisión (20) , en particular una transmisión de correa.
9. Instalación de plegado de acuerdo con una de las reivindicaciones anteriores, caracterizada por que el mecanismo de transmisión (20) está dispuesto en el lado exterior o en el lado interior en un bastidor (11) en la herramienta de plegado (5) .
10. Instalación de plegado de acuerdo con una de las reivindicaciones anteriores, caracterizada por que la herramienta de plegado (5) está conectada elásticamente (13) con el manipulador (2) .
11. Instalación de plegado de acuerdo con una de las reivindicaciones anteriores, caracterizada por que el dispositivo de plegado de esquinas (10) presenta un accionamiento controlado (26) y un servomecanismo (28) para el ajuste multiaxial de una o varias mordazas de plegado (25) .
12. Instalación de plegado de acuerdo con una de las reivindicaciones anteriores, caracterizada por que el accionamiento (26) presenta un cilindro (27) , en la que el servomecanismo (28) presenta un carro (29) con un engranaje de varilla de guía (33) o una transmisión de corredera (35) para el ajuste de la (s) mordaza (s) de plegado (25) .
13. Procedimiento para el plegado de piezas de trabajo (7) por medio de una instalación de plegado (1) con al menos un manipulador multiaxial (2) , que mueve una herramienta de plegado (5) con relación a una pieza de trabajo (7) , en el que una o varias zonas de esquina (8) son plegadas, al menos parcialmente, en la pieza de trabajo (7) por medio de un dispositivo de plegado de esquinas (10) dispuesto allí con un accionamiento (26) propio, en el que el manipulador (2) y el dispositivo de plegado de esquinas (10) están acoplados de acuerdo con la técnica de control, en el que las zonas rectas o más débilmente curvadas de la trayectoria de plegado (40) son plegadas por el manipulador (2) con la herramienta de plegado (5) y en el que el manipulador (2) controla el dispositivo de plegado de esquinas (10) .
14. Procedimiento de acuerdo con la reivindicación 13, caracterizado porque el dispositivo de plegado de esquinas (10) realiza en su zona de actuación una parte de las etapas de plegado de un proceso de plegado de varias etapas, en el que el manipulador realiza con la herramienta de plegado (5) en esta zona de actuación una u otras más etapas de plegado del proceso de plegado de varias etapa.
15. Procedimiento de acuerdo con la reivindicación 13 ó 14, caracterizado porque el manipulador con la herramienta de plegado (5) elevada abandona las zonas de esquina o pandeos y a continuación prosigue su proceso de plegado.
Patentes similares o relacionadas:
Dispositivo y procedimiento de cabezal de dobladillado, del 1 de Julio de 2020, de COMAU S.P.A.: Un dispositivo de dobladillado para su uso en una operación de formación del metal en una pieza de trabajo, el dispositivo de dobladillado comprendiendo: […]
Compuesto de chapa metálica, método para unir chapas y dispositivo de unión, del 4 de Marzo de 2020, de FFT Produktionssysteme GmbH & Co. KG: Un compuesto de chapa metalica, que es un constituyente de una parte de union movil o inamovible, especificamente una puerta, techo solar, puerta trasera, tapa […]
Cuchilla y procedimiento de engarce de chapas, del 11 de Diciembre de 2019, de PSA Automobiles SA: Cuchilla de plegado de un borde de una chapa metálica , que comprende una superficie de contacto […]
Objetos de metal galvanizado y su proceso de fabricación, del 8 de Mayo de 2019, de Fontaine Holdings NV: Un proceso para fabricar un objeto tridimensional de acero galvanizado con una forma que incluye múltiples bordes, comprendiendo dicho proceso, en el siguiente […]
Cabezal de herramienta para realizar operaciones industriales que tiene un sistema de monitoreo inalámbrico, del 10 de Agosto de 2016, de COMAU S.P.A.: Un sistema de realización de operaciones industriales, que comprende: - al menos un cabezal (H) de herramienta provisto de una herramienta ; - al menos un […]
Película adhesiva estructural, del 8 de Junio de 2016, de 3M INNOVATIVE PROPERTIES COMPANY: Una película adhesiva estructural que comprende una composición termoendurecible, que comprende: a) de 40 a 60% en peso de un compuesto epoxídico que tiene […]
MÁQUINA DE ENGATILLADO, del 6 de Junio de 2016, de INGEMAT, S.L: Máquina de engatillado que comprende un carro móvil con desplazamiento lineal en dos sentidos y guiado en un carro fijo; donde el carro móvil se desplaza mediante […]
Dispositivo para el engarce de dos chapas por fricción y su procedimiento de puesta en práctica, del 25 de Mayo de 2016, de PEUGEOT CITROEN AUTOMOBILES S.A.: Dispositivo de engarce por fricción del tipo que comprende al menos una herramienta de engarce concebida para abatir un primer […]