Dispositivo de alimentación.
Dispositivo de alimentación para componentes (2), en el que el dispositivo de alimentación (1) presenta variosreceptores de componentes (4) móviles individualmente,
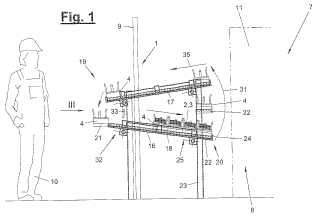
respectivamente, para uno o varios componentes (2) y doso más trayectorias de guías (16, 17) para la alimentación y el retorno de los receptores de componentes (4), que seextiende entre un puesto de carga (19) y un puesto de descarga (20), caracterizado porque al menos una trayectoriade guía (16, 17) presenta una guía (29) de unión positiva y a prueba de basculamiento en varios lados para losreceptores de componentes (4).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2008/009973.
Solicitante: KUKA SYSTEMS GMBH.
Nacionalidad solicitante: Alemania.
Dirección: BLÜCHERSTRASSE 144 86165 AUGSBURG ALEMANIA.
Inventor/es: STURM, THOMAS, JUKIC,MARIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q7/14 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 7/00 Dispositivos para la manipulación de piezas, especialmente combinados a las máquinas-herramientas o dispuestos en estas máquinas o especialmente concebidos para ser utilizados en relación con estas máquinas, p. ej. para el transporte, la carga, la colocación, la descarga, la selección (incorporados a los husillos de trabajo B23B 13/00, B23B 19/02; para tornos automáticos o semiautomáticos B23B 15/00). › coordinados para permitir un trabajo en cadena.
- B65G1/08 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 1/00 Almacenamiento de objetos, individualmente o con un cierto orden, en almacenes o depósitos (combinaciones de transportadores en almacenes, tiendas o talleres, B65G 37/00; apilado de objetos B65G 57/00; sacado de objetos de pilas B65G 59/00; máquinas de carga B65G 65/02). › siendo los objetos alimentados por gravedad.
PDF original: ES-2428618_T3.pdf
Fragmento de la descripción:
Dispositivo de alimentación La invención se refiere a un dispositivo de alimentación con las características del preámbulo de la reivindicación 5 principal.
Se conoce a partir del documento DE 36 03 534 A1 un dispositivo de alimentación de acuerdo con el preámbulo de la reivindicación 1 así como un espacio limpio con un dispositivo de transporte para el transporte de soportes para el alojamiento de osciladores. Un dispositivo de alimentación y de extracción está constituido por rampas, sobre las que se deslizan los soportes bajo la influencia de la fuerza de la gravedad a través de compuertas y son descargados en el espacio limpio por un robot.
El documento JP 10-203 611 A publica un transportador para cajas de almacenamiento con vías de rodillos inclinadas. Las cajas de almacenamiento se mueven en pilas sobre el transportador, de manera que con un dispositivo de agarre se eleva en cada caso la caja más alta de la pila a una altura de descarga favorable ergonómicamente para un trabajador.
Se conocen a partir del documento EP 1 669 308 A1 un procedimiento y un dispositivo para la carga y descarga de productos de almacenamiento desde compartimientos de estanterías de una estantería de almacenamiento. Los compartimientos de estanterías están configurados de dos piezas como unidad de compartimiento de almacenamiento, de manera que un aparato de manipulación de la estantería puede extraer el producto de almacenamiento a través de la elevación de una parte del compartimiento de almacenamiento.
Se conocen por la práctica rampas como dispositivos de alimentación, en las que en el puesto de carga los componentes son insertados o depositados individualmente o en la pila por un trabajador sobre guías en forma de barras o en forma de carriles inclinadas hacia abajo y se deslizan a lo largo de éstas hasta el puesto de descarga, donde son recibidos por un dispositivo automático de procesamiento, por ejemplo, un robot, y son alimentados para un procesamiento posterior o para una manipulación posterior. Tales dispositivos de guía pueden ser problemáticos en el caso de componentes, que tienden a atascarse o a ladearse o que no son aptos para inserción.
Además, se conoce por la práctica suministrar componentes en cajas o almacenes de trinquete y depositarlos sobre un transportador de cajones. Éste mueve las cajas o el almacén sobre la misma trayectoria hacia delante y hacia atrás. Por razones de disponibilidad son necesarios al menos dos transportadores de cajones, para tener preparado siempre un cajón lleno o un almacén en el puesto de descarga para un funcionamiento ininterrumpido del dispositivo de procesamiento. Los transportadores de cajones están dispuestos adyacentes entre sí y tienen una necesidad se superficie de base correspondientemente grande.
Además, en la práctica se emplean transportadores de cadenas como dispositivo de alimentación. Éstos son costosos en la estructura y en el espacio y necesitan un accionamiento controlado. La función de almacenaje intermedio es limitada o está unida con una necesidad de espacio elevada.
El cometido de la presente invención es indicar un dispositivo de alimentación mejorado.
La invención soluciona este cometido con las características de la reivindicación principal. El dispositivo de alimentación reivindicado tiene la ventaja de que es adecuado para componentes discrecionales y posibilita su alimentación segura. Ofrece una posibilidad de almacenaje intermedio economizadora de espacio con gran capacidad y proporciona una disponibilidad segura de los componentes. El dispositivo de alimentación se puede incorporar en el ciclo de una estación o instalación de procesamiento de manera ininterrumpida. Además requiere un gasto reducido de construcción y de espacio y ofrece una alta rentabilidad.
El dispositivo de alimentación ofrece, además, aspectos de seguridad para procesos de manipulación, en particular en el caso de carga y descarga manual. El dispositivo de alimentación permite un desacoplamiento y una separación espacial del puesto de carga y descarga bajo la creación de una zona de seguridad, en particular en conexión con 45 una separación de protección, por ejemplo una valla, que rodea las zonas de trabajo propensas a accidentes, por ejemplo celdas de robot. Un trabajador puede realizar los procesos de carga o descarga fuera de la separación de protección en la zona segura. Esto se puede realizar durante el funcionamiento mecánico en el otro puesto de carga. En este caso también es favorable una función de almacenaje intermedio para la ergonomía.
Los receptores de componentes móviles individuales se ocupan del transporte sin interferencias y se pueden 50 optimizar a tal fin. Con esta finalidad es especialmente ventajosa una guía en unión positiva y a prueba de basculamiento de los receptores de los componentes y una trayectoria de guía configurada de forma correspondiente. Un seguro contra vuelco y un dispositivo de freno para los receptores de componentes elevan la seguridad funcional y la disponibilidad todavía más. Esta técnica de seguridad es compatible con una técnica de descarga mecánica y totalmente automática y no perjudica su función.
Los componentes se pueden desacoplar del contacto directo con la trayectoria de guía. Los receptores de componentes permiten una adaptación a la forma y tamaño de todos los tipos de componentes. En particular, estos componentes no tienen formas aptas para inserción. Pueden tener también cantos sobresalientes, que se engancharían en rampas normales e interferirían en el transporte. Los componentes se pueden disponer, además, en una posición economizadora de espacio sobre los receptores de componentes, lo que incrementa la capacidad del dispositivo de alimentación. La disposición de los componentes se puede optimizar también bajo otros puntos de vista, por ejemplo una posición favorable para el acceso y favorable para la carga y descarga.
Es importante la disposición de una o varías guías de componentes en o junto a los receptores de componentes.
Esto permite una disposición y un posicionamiento definidos, dado el caso separados y protegidos de los componentes durante al almacenamiento. Los receptores de componentes se pueden cargar y descargar de esta manera también más fácilmente. Un seguro contra basculamiento puede asegurar también componentes en su posición prevista durante el almacenamiento y puede mantenerlos separados también en el caso de influencias externas, por ejemplo frenos o topes.
Los receptores de componentes pueden tener al mismo tiempo una función de soporte y soportan los componentes durante la alimentación. Los receptores de componentes pueden recibir uno o varios componentes, por ejemplo pilas de componentes o paquetes de componentes. Por otra parte, en el caso de componentes especialmente grandes, también varios soportes de componentes pueden retener en común un componente.
Los receptores de componentes y las trayectorias de guía se pueden adaptar entre sí de tal manera que se garantiza un transporte seguro y sin interferencias. Los receptores de componentes pueden ser intercambiables. En el caso de un cambio de componentes, solamente se cambian los receptores de componentes o eventualmente de la misma manera los soportes intermedios, pudiendo permanecer iguales las trayectorias de guía.
Los receptores de componentes pueden cumplir diferentes funciones. Por una parte, pueden guiar los componentes y pueden ocuparse de una posición segura para el transporte. A tal fin, los receptores de componentes tienen una 25 guía correspondiente de los componentes. Los receptores de componentes pueden distanciar, además, los componentes unos de los otros y, dado el caso, individualizarlos. Esto es favorable para el transporte de componentes no aptos para inserción y para una descarga segura. Además, a través de una configuración correspondiente, por ejemplo en forma de peina, se pueden recibir los componentes a distancias pequeñas y con alta densidad de empaquetamiento. Los receptores de componentes se ocupan, además, de un posicionamiento correcto de los componentes, en particular en el puesto de descarga. Esto es favorable para una extracción automática a través del dispositivo de procesamiento o de manipulación, por ejemplo un robot.
A través del posicionamiento exacto se pueden suprimir o simplificar procesos de búsqueda durante la extracción. En combinación con una individualización se puede asegurar, además, que los componentes están preparados siempre en el mismo lugar y con la misma posición y alineación para la extracción.
Los receptores de componentes pueden tener también una función de soporte, apoyando los componentes sobre la trayectoria... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo de alimentación para componentes (2) , en el que el dispositivo de alimentación (1) presenta varios receptores de componentes (4) móviles individualmente, respectivamente, para uno o varios componentes (2) y dos o más trayectorias de guías (16, 17) para la alimentación y el retorno de los receptores de componentes (4) , que se extiende entre un puesto de carga (19) y un puesto de descarga (20) , caracterizado porque al menos una trayectoria de guía (16, 17) presenta una guía (29) de unión positiva y a prueba de basculamiento en varios lados para los receptores de componentes (4) .
2. Dispositivo de alimentación de acuerdo con la reivindicación 1, caracterizado porque las trayectorias de guía (16, 17) están configuradas como trayectorias de alimentación y de retorno dispuestas separadas para los receptores de componentes (4) , que presentan inclinaciones dirigidas opuestas entre sí, en el que los receptores de componentes (4) son transportados por la fuerza de la gravedad.
3. Dispositivo de alimentación de acuerdo con la reivindicación 1 ó 2, caracterizado porque la al menos una trayectoria de guía (16, 17) presenta una zona de retención (25) en el extremo del transportador.
4. Dispositivo de alimentación de acuerdo con la reivindicación 1, 2 ó 3, caracterizado porque las trayectorias de guía (16, 17) presentan en uno o en ambos extremos una sección de trayectoria móvil (21, 22) y al menos una instalación de retorno (31) para el transporte de los receptores de componentes (4) entre las trayectorias de guía (16, 17) .
5. Dispositivo de alimentación de acuerdo con una de las reivindicaciones anteriores, caracterizado porque al menos una trayectoria de guía (16, 17) presenta una instalación de individualización (26) para los receptores de componentes (4) y los componentes (2) .
6. Dispositivo de alimentación de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el receptor de componente (4) presenta al menos una parte guiada (41) , que está durante el transporte en un engrane de unión positiva con la guía (29) hacia varias direcciones.
7. Dispositivo de alimentación de acuerdo con una de las reivindicaciones anteriores, caracterizado porque los receptores de componentes (4) presentan una guía de componentes (28) para uno o varios componentes (2) , en el que la trayectoria de guía (16, 17) presenta una o varias instalaciones de apoyo (30) para los componentes (2) .
8. Dispositivo de alimentación de acuerdo con una de las reivindicaciones anteriores, caracterizado porque los receptores de componentes (4) presenta un cuerpo (5) y un soporte intermedio (6) sustituible.
9. Dispositivo de alimentación de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el
dispositivo de alimentación (1) presenta una instalación de freno (38) con una leva de freno (43) móvil giratoria en el receptor de componente (4) , que se puede activar cuando hace tope en un tope extremo (24) o en un receptor de componente (4) anterior.
10. Dispositivo de alimentación de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el dispositivo de alimentación (1) presenta un segundo contra vuelco (37) en el puesto de descarga (20) con un solape (x) pequeño en el extremo trasero del receptor de componente (4) entre la guía (29) y la parte guiada (41) así como un seguro contra basculamiento (36) con una barra de guía (40) , que está alineada paralelamente a la trayectoria de guía (16, 17) y está dispuesta a una distancia que limita el giro del componente sobre los componentes (2) .
11. Receptor de componentes para componentes (2) para la utilización con un dispositivo de alimentación (1) de acuerdo con al menos una de las reivindicaciones 1 a 10, caracterizado porque el receptor de componente (4)
presenta una guía de componente (28) adaptada para uno o varios componentes (2) y un cuerpo (5) con configuración adaptada y con superficies de guía (41) para el transporte deslizante o por rodillos en unión positiva y a prueba de basculamiento sobre trayectorias de guía (16, 17) del dispositivo de alimentación (1) en colaboración con una guía (29) dispuesta allí.
12. Receptor de componentes de acuerdo con la reivindicación 11, caracterizado porque el receptor de 45 componentes (4) presenta un cuerpo (5) y al menos un soporte intermedio (6) que se puede conectar con el cuerpo (5) con una guía de componente (28) .
13. Estación de procesamiento para componentes (2) con al menos una instalación automática de procesamiento o de manipulación (11) y con una instalación de protección periférica (9) , en la que la estación de procesamiento (8) presenta al menos un dispositivo de alimentación (1) para componentes (2) , en la que el dispositivo de alimentación 50 (1) presenta varios receptores de componentes (4) móviles individualmente, respectivamente, para uno o varios componentes (29) y dos o más trayectorias de guía (16, 17) para la alimentación y retorno de los receptores de componentes (4) , que se extienden entre un puesto de carga (19) y un puesto de descarga (20) , caracterizada porque el dispositivo de alimentación (1) está configurado de acuerdo con una de las reivindicaciones 1 a 10.
14. Estación de procesamiento de acuerdo con la reivindicación 13, caracterizada porque el dispositivo de alimentación (1) se extiende a través de la instalación de protección (9) , en la que la instalación de procesamiento o de manipulación (11) presenta al menos un robot (12) de varios ejes con una instalación de agarre (13) para los componentes (2) y/o los receptores de componentes (4) .
15. Estación de procesamiento de acuerdo con la reivindicación 13 ó 14, caracterizada porque la instalación de procesamiento o de manipulación (11) presenta una configuración como instalación de retorno (31) para los receptores de componentes (4) .
Patentes similares o relacionadas:
Aparato de cambio de palé, del 17 de Junio de 2020, de MATSUURA MACHINERY CORPORATION: Un aparato de cambio de palé que está equipado con un eje de giro que soporta brazos de cambio de palé para transferir un palé (P, P') entre una […]
Transportador de acumulación con un dispositivo de individualización y procedimiento de individualización, del 3 de Junio de 2020, de Koppold, Markus: Transportador de acumulación que comprende al menos un portador de piezas de trabajo y un dispositivo de individualización, al menos un tope para detener y/o liberar el portador […]
Sistema de cambio de palé para una máquina herramienta, del 15 de Abril de 2020, de FIDIA S.P.A.: Sistema de cambio de palé para una máquina herramienta (MT), que comprende: - una estación de depósito y recogida de palés y una […]
Dispositivo de posicionamiento de piezas de trabajo para un centro de mecanizado, centro de mecanizado y procedimiento, del 17 de Julio de 2019, de F. ZIMMERMANN GMBH: Dispositivo de posicionamiento de piezas de trabajo para un centro de mecanizado , en particular un centro de mecanizado horizontal, […]
Dispositivo de transporte de objetos de procesamiento y sistema de corte, del 20 de Marzo de 2019, de Roland DG Corporation: Dispositivo de transporte de objetos de procesamiento, que comprende: un almacenador que está configurado para alojar una pluralidad de objetos de procesamiento […]
Dispositivo de transferencia de piezas de trabajo, así como máquinas herramientas con un dispositivo de transferencia de piezas de trabajo, del 20 de Marzo de 2019, de TRUMPF SACHSEN GMBH: Dispositivo de transferencia de piezas de trabajo con un portapiezas , así como con una propulsión motriz , mediante la […]
 Sistema de transporte autónomo, del 15 de Octubre de 2018, de EWAB Engineering AB: Un sistema de transporte, que comprende:
una pluralidad de portadores de piezas de trabajo (WPC), presentando cada uno una etiqueta legible y escribible por […]
Sistema de transporte autónomo, del 15 de Octubre de 2018, de EWAB Engineering AB: Un sistema de transporte, que comprende:
una pluralidad de portadores de piezas de trabajo (WPC), presentando cada uno una etiqueta legible y escribible por […]
Dispositivo para proporcionar aparatos de sujeción y/o de mecanizado y sistema, del 21 de Febrero de 2018, de ThyssenKrupp System Engineering GmbH: Dispositivo para proporcionar aparatos de sujeción y/o de mecanizado para un manipulador, en particular en una calle de fabricación para la fabricación de carrocerías […]