Dispositivo de control de carga para una grúa.
Un dispositivo de control de carga para controlar el movimiento de una carga suspendida de una grúa decontenedores,
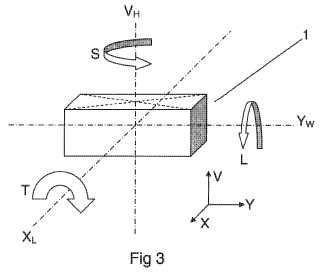
comprendiendo dicha grúa una carro (21), un spreader (15) y líneas de carga dispuestas ensuspensión en cuatro puntos (4a - 4d) para elevar una carga, y un sensor óptico (5) para detectar la posición de ladeflexión de un eje ortogonal (X, Y, V) de un contenedor suspendido bajo el spreader, con referencia a una líneacentral imaginaria (XL, YW, VH) de dicho eje ortogonal del contenedor, donde dos o más accionamientos (16 - 19)están dispuestos unidos al menos a una línea de carga, y dispuestos para desplazar al menos a uno de dichospuntos (4a - 4d) de suspensión, acercándolo o alejándolo de dicha línea central imaginaria (XL, YW, VH) acortandoy/o alargando al menos una línea de carga, y hay dispuesto un medio sensor sobre al menos uno de dichosaccionamientos, para detectar la posición del accionamiento y con ello cualquier cambio de longitud de al menos unalínea de carga, caracterizado porque el sensor óptico está dispuesto en la línea de visión de dos o más fuentes deluz (7) dispuestas sobre el spreader en una primera línea recta con respecto a un eje ortogonal del contenedor,porque el sensor óptico está dispuesto también en la línea de visión de al menos una tercera fuente (T) de luzdispuesta sobre el spreader, sobre una línea que es perpendicular a la primera línea recta, y porque la al menos unatercera fuente (T) de luz está dispuesta sobre el spreader a una cierta distancia vertical desde las fuentes de luz (7)de la primera línea recta.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E06120670.
Solicitante: ABB AB.
Nacionalidad solicitante: Suecia.
Dirección: KOPPARBERGSVÄGEN 2 721 83 VÄSTERÀS SUECIA.
Inventor/es: HENRIKSSON,BJORN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C1/66 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 1/00 Elementos o dispositivos de toma de carga fijados a los mecanismos de subida, bajada o arrastre de las grúas o adaptados para ser utilizados con estos mecanismos y transmitir los esfuerzos a los objetos o grupos de objetos (medios para unir cables o cuerdas F16G 11/00). › para enganchar en agujeros, cavidades o prominencias dispuestas especialmente en los objetos para permitir su sujeción.
- B66C13/08 B66C […] › B66C 13/00 Otras características de estructura o detalles. › para depositar las cargas según una orientación o en una posición dadas.
- B66C13/46 B66C 13/00 […] › Indicadores de posición para cargas suspendidas o para elementos de grúas.
PDF original: ES-2401439_T3.pdf
Fragmento de la descripción:
Dispositivo de control de carga para una grúa
Campo técnico
La invención está relacionada con un dispositivo y con un método para trasladar contenedores de mercancías. La invención concierne a un dispositivo y a un método para desplazar un contenedor por medio de una grúa, de manera que la posición y el desplazamiento del contenedor o del spreader (pórtico extensor de agarre) se controla con precisión durante el transporte, la recogida o la descarga de un contenedor o del spreader vacío. En particular es un dispositivo y un método para medir y controlar el desplazamiento y las oscilaciones del contenedor sobre uno o varios ejes ortogonales del contenedor.
Técnica anterior
En todo el mundo se embarca un volumen grande y creciente de mercancías en contenedores estándar de transporte. El transbordo se ha convertido en un papel crítico en la manipulación de mercancías. En cada punto de la transferencia de un medio de transporte a otro, de barco a costa en puertos y atraques por ejemplo. Hay normalmente un tremendo número de contenedores que deben descargarse, trasladarse a una pila temporal, y después cargarse a otro barco, de nuevo al mismo barco o cargarse, en lugar de eso, con otra forma de transporte. La carga y descarga de contenedores a o desde un barco consume una gran cantidad de tiempo. El desarrollo de grúas automatizadas ha mejorado la carga y descarga y ha hecho que la productividad sea más predecible y además ha eliminado muchas situaciones en las que los trabajadores portuarios se exponían a peligro y daños Las demandas técnicas para la manipulación de contenedores con precisión son enormes. Se puede manipular un contenedor con una grúa fija, o una grúa que se desplaza sobre carriles o que puede desplazarse de cualquier otra manera. Cada grúa tiene un dispositivo de elevación que incorpora normalmente un spreader de algún tipo que directamente toma contacto con un contenedor para agarrarlo, elevarlo, bajarlo y soltarlo. En esta descripción se usa el término spreader para designar una parte de un dispositivo elevador que está en contacto directo con un contenedor. Normalmente se diseñan los spreaders para manejar más de un tamaño de contenedor, por ejemplo contenedores de longitud de 20-40 pies (6, 096-12, 192 m) o 20-40-45 pies (6, 096-12, 192-13, 716 m) . Se suspende el spreader de la pluma de una grúa desde un dispositivo móvil conocido como carro, que se desplaza a lo largo de la pluma de la grúa, en una dirección que normalmente se toma como dirección X. Durante las operaciones se mide y/o se calcula la posición del carro. La posición del spreader y del contenedor de debajo se puede supervisar usando una cámara que observa una fuente de luz o marcador en el spreader. Es de gran importancia para una correcta operación, y especialmente para operaciones controladas automáticamente, que se conozca exactamente la posición del contenedor durante la recogida y la descarga de un contenedor.
Se necesita precisión durante la recogida para que el spreader agarre adecuadamente el contenedor al primer intento. La precisión durante la descarga no solo es importante para descargar el contenedor al primer intento, sino también porque un error al apilar los contenedores uno encima de otro puede conducir a un error acumulado que puede ser inaceptable. Cuando una pila de 5 contenedores no es estable, supone que potencialmente se dañen los contenedores. Una pila inestable además requiere una mayor superficie de suelo y más espacio despejado alrededor para operaciones de elevación.
En muchas fases de cada operación se pueden operar las grúas automáticamente. Sin embargo, normalmente se requiere un operario de grúa que controle la grúa para abordar situaciones que no se manejan con operaciones automatizadas existentes. Por ejemplo, cuando se hace descender un contenedor para descargarlo normalmente hay un movimiento de torsión del contenedor, conocido como inclinación. Con un problema de inclinación, cuando el eje largo del contenedor se balancea alrededor de un eje vertical en una dirección oblicua (de torsión) , pueden tardarse muchos segundos, quizás hasta un minuto, antes de que se desvanezcan lo suficiente las oscilaciones oblicuas para que se pueda hacer descender al contenedor sobre un camión, contenedor u otro objetivo. No se puede descargar el contenedor correctamente si no está alineado correctamente sobre el objetivo de descarga. Cuando se descarga un barco quizás con muchos cientos de contenedores, el efecto acumulativo de la pérdida de tiempo de descarga debido a oscilaciones oblicuas es considerable. El operario de grúa puede hacer ajustes manuales para detener el momento oblicuo orientando el spreader contra el momento o accionando dispositivos auxiliares de ajuste. Sin embargo la eficacia de intervenciones manuales depende del operario y no reduce de manera fiable el tiempo perdido por oscilaciones oblicuas.
La solicitud JP2001322796 titulada “Vibration control device for a load” (Dispositivo de control de vibración para una carga) , de Mitsubishi, describe un dispositivo que suspende un spreader convencional ajustado con cuatro sensores de tensión para medir la tensión del cabo en los cabos de carga. Se coloca un sensor de tensión en cada cabo de elevación cerca de un punto donde se fija el cabo, dispuesto de tal manera que hay dos sensores en un lado del spreader y dos en el otro lado. En el extremo que no está fijo se colocan dos bobinas principales para elevar la carga, y enrollar o desenrollar, para subir o bajar el contenedor. Se dispone un mecanismo cilíndrico oblicuo conectado a poleas situadas a cada lado cerca de las bobinas de manera que se ejerce una fuerza de tensión mayor en los cabos de carga de una lado del spreader y una correspondiente tensión menor en los cabos de carga del otro lado del spreader, para contrarrestar un error en el ángulo de inclinación. Se comparan las medidas de tensión de los cabos en cada extremo del contenedor. Se calcula un ángulo de inclinación 8 (theta) de las medidas de tensión en los cabos combinadas con cálculos de una distancia entre el carro y el spreader basándose en medidas de frecuencia rotacional y ángulo de rotación de las bobinas. Una traducción automática online de la descripción del documento JP2001322796 explica que el uso de sensores de tensión proporciona una manera de detectar la inclinación que puede ser mejor que medios ópticos más costosos. Sin embargo, el dispositivo que se describe depende de medidas comparables de tensión para cada extremo de contenedor que hace que el dispositivo sea susceptible de errores en casos donde la distribución del peso dentro del contenedor es irregular y un extremo del contenedores pesa más que el otro. También es algo problemático confiar en sensores de tensión normalmente de tipo de célula de carga. Estos son normalmente dispositivos grandes y pesados que requieren calibración a intervalos frecuentes para mantener el nivel de precisión relativa que tales células de carga pueden proporcionar. De manera similar, el resumen del documento JP10017268, de Mitsui, titulado “Skew swing preventive method and device of crane suspending cargo” (Método de prevención de la oscilación de inclinación y dispositivo de grúa con carga suspendida) , describe un dispositivo que incluye el uso de sensores de tensión en los cabos de carga. También se describen medios ópticos de detección para determinar un ángulo de inclinación. Este dispositivo o sistema usa medidas de fuerza de tracción en los cabos de elevación, junto con medidas de velocidad angular y ángulo de inclinación por medio de una cámara CCD, para encontrar o calcular un error en el ángulo de inclinación y un periodo de oscilación de la inclinación. Se calcula con un ordenador un periodo de oscilación natural mediante un momento de inercia calculado para el contenedor colgante. Se aplica tensión de cabo a uno u otro extremo de un cabo de carga mediante un accionamiento dispuesto en cada extremo de cada cabo de carga. La fuerza motora requerida por el accionamiento se reduce con cambios direccionales de los cabos de carga y añadiendo poleas adicionales y poleas de equilibrio de tensiones, de manera que la carga del contenedor colgante no actúa directamente sobre los accionamientos. Se usa un ordenador para contrarrestar la tensión mediante accionamientos montados en ambos lados del carro hasta que se encuentra que el error de inclinación es cero. Sin embargo, como en el documento JP2001322796 (anterior) , el sistema descrito confía principalmente en medidas de tensión de cabo. La tensión de cabo está influenciada también por otras fuerzas además de la diagonal o movimiento de inclinación del contenedor, incluyendo fuerzas debido a la distribución de peso irregular... [Seguir leyendo]
Reivindicaciones:
1. Un dispositivo de control de carga para controlar el movimiento de una carga suspendida de una grúa de contenedores, comprendiendo dicha grúa una carro (21) , un spreader (15) y líneas de carga dispuestas en suspensión en cuatro puntos (4a - 4d) para elevar una carga, y un sensor óptico (5) para detectar la posición de la deflexión de un eje ortogonal (X, Y, V) de un contenedor suspendido bajo el spreader, con referencia a una línea central imaginaria (XL, YW, VH) de dicho eje ortogonal del contenedor, donde dos o más accionamientos (16 - 19) están dispuestos unidos al menos a una línea de carga, y dispuestos para desplazar al menos a uno de dichos puntos (4a - 4d) de suspensión, acercándolo o alejándolo de dicha línea central imaginaria (XL, YW, VH) acortando y/o alargando al menos una línea de carga, y hay dispuesto un medio sensor sobre al menos uno de dichos accionamientos, para detectar la posición del accionamiento y con ello cualquier cambio de longitud de al menos una línea de carga, caracterizado porque el sensor óptico está dispuesto en la línea de visión de dos o más fuentes de luz (7) dispuestas sobre el spreader en una primera línea recta con respecto a un eje ortogonal del contenedor, porque el sensor óptico está dispuesto también en la línea de visión de al menos una tercera fuente (T) de luz dispuesta sobre el spreader, sobre una línea que es perpendicular a la primera línea recta, y porque la al menos una tercera fuente (T) de luz está dispuesta sobre el spreader a una cierta distancia vertical desde las fuentes de luz (7) de la primera línea recta.
2. Un dispositivo de acuerdo con la reivindicación 1, en el que al menos un primer accionamiento (16, 18) está dispuesto para enrollarse en una primera parte de una primera línea de carga y, al mismo tiempo, hay dispuesto un segundo accionamiento (17, 19) para soltar una segunda parte de una primera línea de carga.
3. Un dispositivo de acuerdo con la reivindicación 1, en el que al menos uno de dichos accionamientos comprende un dispositivo dispuesto para el movimiento en dirección de avance o de retroceso para enrollar o soltar parte de una línea de carga.
4. Un dispositivo de acuerdo con la reivindicación 3, en el que al menos uno de dichos accionamientos comprende un dispositivo dispuesto para el movimiento en línea recta en una dirección de avance o de retroceso.
5. Un dispositivo de acuerdo con la reivindicación 1, en el que al menos un accionamiento comprende un accionamiento de husillo activado por un motor para el movimiento de una línea de carga en una línea sustancialmente recta.
6. Un dispositivo de acuerdo con la reivindicación 5, con al menos uno de dichos accionamientos que comprende un dispositivo roscado dispuesto para extender o retirar un eje.
7. Un dispositivo de acuerdo con la reivindicación 1, que comprende medios para la comparación de la posición y límites del movimiento de un primer accionamiento con la posición y límites del movimiento de un segundo accionamiento, y para la determinación de qué accionamiento debe ser movido.
8. Un dispositivo de acuerdo con la reivindicación 1, que comprende una unidad de control con un bucle de control para ajuste de un error de deflexión detectado con respecto a una referencia dada usando un bucle que comprende una entrada desde una posición detectada de al menos uno de dichos accionamientos (16-19) .
9. Un dispositivo de acuerdo con la reivindicación 8, en el que la unidad de control comprende una entrada para un valor continuo de una posición de al menos un accionamiento.
10. Un dispositivo de acuerdo con la reivindicación 8, en el que la unidad de control comprende una entrada para un valor de la posición del accionamiento muestreado con respecto a un período de tiempo o a un incremento de movimiento.
11. Un dispositivo de acuerdo con la reivindicación 1, en el que dicho dispositivo de control de cargas comprende cuatro de dichos accionamientos dispuestos en el mismo lado del spreader.
12. Un dispositivo de acuerdo con la reivindicación 1, en el que dicho dispositivo de control de cargas comprende cuatro de dichos accionamientos dispuestos en el lado del extremo superior de la pluma del spreader.
13. Un dispositivo de acuerdo con la reivindicación 1, en el que dicho dispositivo de control de cargas comprende al menos un motor eléctrico rotativo dispuesto como medio de accionamiento para al menos un accionamiento para alargar o acortar una línea de carga.
14. Un dispositivo de acuerdo con la reivindicación 1, en el que al menos un accionamiento es alimentado por un motor y comprende una transmisión de una unidad para el desplazamiento de una línea de carga de cualquiera de la lista de: tornillo sin fin, unidad de bisel, cremallera y piñón.
15. Un dispositivo de acuerdo con la reivindicación 1, en donde uno o más dispositivos alimentados hidráulicamente están dispuestos como medios de accionamiento o como un accionamiento para desplazar una línea de carga y por lo tanto alargar o acortar la línea de carga.
16. Un dispositivo de acuerdo con la reivindicación 1, donde el sensor óptico (5) es alguno de la lista de una cámara CCD, escáner por láser, telémetro de láser.
17. Un método para el control de una grúa de contenedores con una carga suspendida por medio de un dispositivo de control de cargas, comprendiendo dicha grúa un carro, un spreader y líneas de carga dispuestas en un suspensión en cuatro puntos para la elevación de carga, y un sensor óptico dispuesto en el carro, comprendiendo
- la detección con el sensor óptico de una posición de deflexión de un eje ortogonal (X, Y, V) de un contenedor (1) (o spreader) sobre una línea central imaginaria (XL, YW, VH) de dicho eje ortogonal, detectando ópticamente la deflexión, en el que el sensor óptico está dispuesto en una línea de visión de dos o más fuentes de luz (7) , dispuestas en el spreader en una primera línea recta relativa al eje ortogonal del contenedor, donde el sensor óptico también se dispone en línea de visión de al menos una tercera fuente (T) de luz dispuesta en el spreader en una línea que es perpendicular a la primera línea recta, y en donde al menos una tercera fuente (T) de luz está dispuesta en el spreader a una distancia vertical desde las fuentes de luz (7) de la primera línea recta,
- la determinación de la posición lineal de al menos uno de dichos accionamientos, y el envío de una señal al menos a dos de dichos accionamientos para el desplazamiento de al menos uno de dichos puntos de suspensión (4a-d) acercándolo o alejándolo de dicha línea central imaginaria (XL, YW, VH) .
18. Un método de acuerdo con la reivindicación 17, que además comprende la comparación de la posición de un primer actuador y los límites de movimiento del accionamiento con al menos una segunda posición del accionamiento y los límites del movimiento y la determinación de qué accionamiento o accionamientos se desplazará o desplazarán.
19. Un método de acuerdo con la reivindicación 17, que además comprende el enrollado en una primera parte de una primera línea de carga, y al mismo tiempo, soltarla en una segunda parte de la primera línea de carga y acortando o alargando así una parte de la primera línea de carga.
20. Un método de acuerdo con la reivindicación 19, que además comprende el paso de que dos accionamientos de un par de accionamientos correspondientes al mismo lado del spreader se enrollan en la misma dirección positiva
o negativa.
21. Un método de acuerdo con la reivindicación 20, que además comprende la etapa de aquellos dos accionamientos de un par de accionamientos correspondientes al mismo lado del spreader sueltan la línea de carga en la misma dirección tanto positiva como negativa.
22. Un método de acuerdo con la reivindicación 17, que además comprende la etapa de dirigir al menos un accionamiento con un motor dispuesto con un dispositivo roscado.
23. Un método de acuerdo con la reivindicación 22, que además comprende la etapa de dirigir al menos un accionamiento con un motor dispuesto con un dispositivo roscado para extender, retirar un eje dispuesto unido a una línea de carga.
24. Un método de acuerdo con la reivindicación 17, que además comprende la etapa de determinar continuamente la posición de al menos un accionamiento.
25. Un método de acuerdo con la reivindicación 17, que además comprende la etapa de determinar la posición de al menos un accionamiento por medio de muestras, dependiendo de un periodo de tiempo o un incremento de movimiento.
26. Un método de acuerdo con la reivindicación 17, que además comprende la etapa de medida con el sensor óptico de una distancia a dos o más fuentes de luz dispuestas en el spreader en una primera línea recta relativa al eje ortogonal del spreader.
27. Un método de acuerdo con la reivindicación 17, que además comprende la etapa de medida con el sensor óptico de una distancia a dos o más fuentes de luz dispuestas en una primera línea recta en el spreader y de medida de cualquier desviación lineal del eje ortogonal en dirección X o Y.
28. Un método de acuerdo con la reivindicación 27, que además comprende la etapa de medida con el sensor óptico de una distancia al menos a una tercera fuente (T) de luz dispuesta sobre una línea perpendicular a la primera línea recta y la determinación de un error de escora.
29. Un método de acuerdo con la reivindicación 28, que además comprende la etapa de determinación de una distancia al menos a una tercera fuente de luz, calculando la deflexión de escora del contenedor, y de determinar un desplazamiento común de un par o mas de dichos puntos de suspensión (4a-4c.
4. 4d) para corregir el error de escora.
30. Un método de acuerdo con la reivindicación 17, que además comprende la etapa de medida a cada una de las fuentes de luz desde el sensor óptico, midiendo la deflexión lineal, un error de estiba del spreader y la
determinación de un movimiento común de un par de uno más de dichos puntos de suspensión (4a-4c.
4. 4d) para corregir el error de estiba.
31. Un método de acuerdo a cualquiera de las reivindicaciones 17-30, que además comprende el control de dicha
grúa de contenedores por medio de la ejecución de uno o más programas de ordenador en al menos un ordenador o 5 procesador.
32. Un programa de ordenador que cuando es leído desde un ordenador o procesador provocará que el ordenador o procesador lleve a cabo un método de acuerdo con las etapas de cualquiera de las reivindicaciones 17
30.
33. Un medio legible por ordenador que comprende un programa de ordenador que cuando es leído desde un ordenador o procesador provocará que el ordenador o procesador lleve a cabo un método de acuerdo con los pasos de cualquiera de las reivindicaciones 17-30.
Patentes similares o relacionadas:
Equipo para manipular un componente de turbina eólica y método de montar dicho equipo y manipular un componente de turbina eólica usando dicho equipo, del 8 de Julio de 2020, de VESTAS WIND SYSTEMS A/S: Equipo para manipular un componente de turbina eólica, que comprende: un cable de elevación ; y un bloque de montaje para acoplar […]
Medio de elevación de carga, del 3 de Junio de 2020, de PFEIFER HOLDING GMBH & CO. KG: Medio de elevación de carga para levantar con eslinga componentes pesados, en particular elementos prefabricados de hormigón, que se compone […]
Sistema de transporte con un vehículo aéreo no tripulado y un dispositivo de agarre para la recogida de bultos sueltos desde arriba, y procedimiento para la recogida de bultos sueltos empleando este sistema de transporte, del 1 de Abril de 2020, de FRAUNHOFER-GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG E.V.: Sistema de transporte que comprende un vehículo aéreo no tripulado y un dispositivo de agarre para la recogida de bultos sueltos desde arriba, que comprende […]
Grúa "Backpack transtainer", del 13 de Febrero de 2020, de BARBERÁ MAYOR, Juan Carlos: El propósito de la invención de este proceso es aumentar el rendimiento de las terminales portuarias en la transferencia de contenedores […]
 Anillo de elevación pivotante para la elevación de cargas, del 25 de Diciembre de 2019, de Intelprop S.A: Punto de elevación para la elevación de cargas que comprende:
un cuerpo pivotante al cual se asocia un medio (16; 16'; 116; 316; […]
Anillo de elevación pivotante para la elevación de cargas, del 25 de Diciembre de 2019, de Intelprop S.A: Punto de elevación para la elevación de cargas que comprende:
un cuerpo pivotante al cual se asocia un medio (16; 16'; 116; 316; […]
Pestaña de tope o de amarre, zócalo de fijación para una pestaña de tope o de amarre así como punto de tope o de amarre con una pestaña de tope o de amarre y zócalo de fijación, del 6 de Noviembre de 2019, de RUD KETTEN RIEGER & DIETZ GMBH U. CO. KG: Pestaña de tope o de amarre con una sección de suspensión en forma de ojal o de gancho para la suspensión de un medio de tope, de amarre o de elevación , y con […]
INSTALACIÓN PARA VÍAS FÉRREAS CON PLACAS PREFABRICADAS Y PROCEDIMIENTO AUTOMATIZADO DE MONTAJE DE LA MISMA, del 6 de Noviembre de 2019, de UNIVERSITAT POLITECNICA DE VALENCIA: Instalación para vías férreas con placas prefabricadas y procedimiento automatizado de montaje que hace uso la misma, que comprende placas prefabricadas […]
Dispositivo para la manipulación de un molde, del 18 de Septiembre de 2019, de Rodrigues da Costa, José: Dispositivo para la manipulación de un molde, especialmente de inyección de pieza de plástico, que comprende: - Un órgano de unión , apto para ser unido a un […]