PROCEDIMIENTO Y DISPOSITIVO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS.
Procedimiento y dispositivo de control electrónico de seccionadores de celdas de media tensión de subestaciones eléctricas.
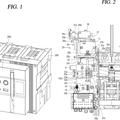
Los seccionadores comprenden un accionamiento manual por manivela y un motor (3) de accionamiento eléctrico del seccionador para abrirlo, cerrarlo o posicionarlo en tierra. Además comprende una indicación de cuándo ha finalizado una maniobra del seccionador y una señalización de cuándo se produce sobrecorriente en el motor. El dispositivo comprende un autómata seccionador (1) y un autómata de celdas (6) que almacena las diferentes funciones que convencionalmente incorpora cada tipo de celda para su aplicación a cualquier celda.
El procedimiento detecta la posición del seccionador, cuando se inserta la manivela, cuando se produce la señal de fin de maniobra y cuando se produce sobrecorriente, para generar, en función de las anteriores detecciones, un estado estable, de tránsito, de error o de recuperación y señalizar el estado generado.
Simplifica el control electrónico de las subestaciones.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201132086.
Solicitante: MANUFACTURAS ELÉCTRICAS, S.A.U.
Nacionalidad solicitante: España.
Inventor/es: MONASTERIO URIARTE,Juan María.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- H01H71/10 ELECTRICIDAD. › H01 ELEMENTOS ELECTRICOS BASICOS. › H01H INTERRUPTORES ELECTRICOS; RELES; SELECTORES; DISPOSITIVOS DE PROTECCION DE EMERGENCIA (cables de contacto H01B 7/10; interruptores automáticos de tipo electrolítico H01G 9/18; circuitos de protección, de seguridad H02H; conmutación por medios electrónicos sin cierre de contactos H03K 17/00). › H01H 71/00 Detalles de los interruptores o relés de protección cubiertos por los grupos H01H 73/00 - H01H 83/00. › Mecanismos de accionamiento o de disparo.
- H01H9/16 H01H […] › H01H 9/00 Detalles de los dispositivos de conmutación no cubiertos por H01H 1/00 - H01H 7/00. › Indicadores de la posición del interruptor, p. ej. "marcha" o "parada".
- H02J13/00 H […] › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02J CIRCUITOS O SISTEMAS PARA LA ALIMENTACION O LA DISTRIBUCION DE ENERGIA ELECTRICA; SISTEMAS PARA EL ALMACENAMIENTO DE ENERGIA ELECTRICA. › Circuitos para proveer de indicación a distancia de las condiciones de una red, p. ej. un registro instantáneo de las condiciones de apertura o de cierre de cada seccionador de red; Circuitos para proveer el mando a distancia de medios de conmutación en una red de distribución de energía, p. ej. conexión o desconexión de consumidores de corriente por utilización de señales de impulsos codificados transmitidos por la red.
Fragmento de la descripción:
PROCEDIMIENTO Y DISPOSITIVO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS OBJETO DE LA INVENCIÓN
La invención se refiere a un procedimiento y a un dispositivo que tienen por objeto simplificar el control de los seccionadores de celdas de media tensión de las subestaciones eléctricas, mediante la incorporación de un control electrónico.
Es otro objeto de la invención el permitir adaptar el control a las diferentes funcionalidades que convencionalmente incorporan los distintos tipos de celdas de media tensión de las subestaciones eléctricas.
También es objeto de la invención el simplificar el cableado de conexionado entre los diferentes elementos de la subestación.
ANTECEDENTES DE LA INVENCIÓN
Las subestaciones de media tensión (MT) se componen de un determinado número de celdas modulares que están diseñadas para realizar diferentes funciones, por lo que presentan una composición y disposición variable para cada subestación, estando las celdas ubicadas de forma contigua una al lado de las otras formando una o varias filas separadas unas de otras.
Cada una de las celdas disponen de uno o dos seccionadores de tres posiciones en combinación con un interruptor automático como elementos de maniobra por cada celda. En el caso en el que se utilice un seccionador, se conoce como celda de simple juego de barras, y en el caso en el que se empleen dos seccionadores, se conoce como celda de doble juego de barras.
Tanto las celdas de simple barra, como las celdas de doble barra, pueden ser diseñadas para realizar diferentes funciones.
La maniobra de los seccionadores puede realizarse de forma local desde la propia subestación o a distancia desde puestos de control centralizados, que realizan el control y maniobra de varias subestaciones de acuerdo con las necesidades de explotación de las redes de distribución de energía eléctrica.
Los seccionadores comprenden un accionamiento manual mecánico por manivela para efectuar las maniobras locales, y además comprenden un motor de accionamiento eléctrico para la realización de maniobras tanto locales como a distancia, de forma que se puede ubicar el seccionador en una posición, abierto, cerrado, o tierra, para gobernar el funcionamiento de las celdas según las necesidades requeridas.
Además los seccionadores están dotados de un elemento de detección y señalización de fin de maniobra que indica cuando ha finalizado una maniobra del seccionador para facilitar el control del estado del seccionador, y además comprende un circuito de detección y señalización de cuando se produce sobrecorriente en el circuito del motor para señalizar un mal funcionamiento del seccionador.
El accionamiento de los seccionadores mediante el motor comprende un primer recorrido muerto durante el cual el giro del motor no produce el giro del eje del seccionador. Tras el ángulo muerto el giro del motor actúa sobre el eje del seccionador proporcionando su accionamiento real, realizando el cambio de posición del seccionador correspondiente a abierto, cerrado o tierra. A continuación existe un segundo recorrido muerto durante el cual el giro del motor tampoco produce el giro del eje del seccionador. Al finalizar el segundo recorrido muerto se genera la señal de fin de maniobra, y además existe un tope mecánico que en caso de llegarse al mismo se produce sobre corriente en el motor. La sobrecorriente en el motor también se produce por agarrotamiento del mismo.
Previa a la realización de cada maniobra se debe tener en cuenta el estado de los demás elementos de la celda y de la subestación, por lo que se deben de realizar enclavamientos mecánicos y/o eléctricos entre todos los elementos de las celdas, con el fin de asegurar la realización de las maniobras de forma segura, tanto para las personas como para la red de distribución.
La arquitectura de construcción de la celda incluye todos los enclavamientos mecánicos necesarios entre los elementos de maniobra que conforman la celda. Sin embargo no se contemplan enclavamientos mecánicos entre diferentes celdas que conforman la subestación.
La configuración de las diferentes celdas que conforman cada una de las subestaciones, obliga a que los automatismos de enclavamiento de los accionamientos eléctricos se efectúen de acuerdo con las necesidades de cada caso, lo que obliga a la realización de diferentes configuraciones de celda.
Además en el caso en el que se requiera realizar ampliaciones de celdas y/o cambio de funciones, por ejemplo por cambios de explotación de las subestaciones, obligan a que se deban de rehacer los circuitos de enclavamiento.
Los circuitos de enclavamiento se realizan mediante relés o contactores electromecánicos asociados a un número elevado de sensores electromecánicos y complicados cableados asociados y además variables de acuerdo con las necesidades de cada caso, que dificulta considerablemente las ampliaciones de celdas y/o los cambios de funcionalidad de las mismas.
Además de los circuitos necesarios para accionamiento de los elementos propios de la maniobra es necesario incluir en las celdas las protecciones necesarias correspondientes a las máquinas y/o líneas que alimentan las celdas.
El tamaño reducido de las celdas, como es el caso de las celdas aisladas en gas SF6, hace que los circuitos eléctricos de maniobra, se monten en la celda de forma segregada en diferentes cubículos de la celda, realizándose la interconexión eléctrica entre circuitos mediante conectores enchufables por necesidades de fabricación. Todo lo anterior origina complicados circuitos que presentan los siguientes inconvenientes:
-Dificultades de ingeniería debidas a la gran cantidad de circuitos y variables debida a las diferentes funciones de celdas y a las condiciones de explotación.
-Elevados costes de fabricación derivados de la gran cantidad de elementos electromecánicos y conexiones eléctricas asociadas que derivan ademán en errores de conexionados.
-Dificultades de pruebas de celdas en fábrica y puestas en marcha en subestaciones.
-Necesidad de cortes de suministro de energía en circuitos de potencia en las subestaciones para ampliaciones de celdas con su correspondiente puesta en marcha.
-Elevados costes de mantenimiento debidos a revisiones periódicas de gran número de conexiones eléctricas, necesarias para garantizar el funcionamiento de los accionamientos eléctricos.
DESCRIPCIÓN DE LA INVENCIÓN
Para conseguir los objetivos y resolver los inconvenientes anteriormente indicados, la invención proporciona un nuevo procedimiento y dispositivo de control electrónico de seccionadores de celdas de media tensión de las subestaciones eléctricas, en los que al igual que en el estado de la técnica los seccionadores comprenden un accionamiento manual mecánico por manivela; un motor de accionamiento eléctrico del seccionador, para realizar una maniobra del seccionador posicionándolo en una posición abierto, cerrado o tierra; un elemento de detección y señalización de fin de maniobra para indicar cuando ha finalizado una maniobra del seccionador; y un circuito de detección y señalización de cuando se produce sobrecorriente en el circuito del motor.
El procedimiento de la invención se caracteriza por que comprende detectar mediante palpadores cuando se produce una posición del seccionador abierto, cerrado o tierra; detectar cuando se inserta la manivela para accionamiento manual; detectar cuando se produce la señal de fin de maniobra; y detectar cuando se produce sobrecorriente en el motor.
Dependiendo de las anteriores detecciones realizadas, se genera un estado seleccionado entre un estado estable, correspondiente a una posición del seccionador abierto, cerrado o tierra; un estado de tránsito entre dos estados estables, un estado de error, y un estado de recuperación a un estado estable desde un estado de error que se haya producido durante un estado de tránsito. Además se genera la señalización correspondiente a cada uno de los estados generado.
Se genera un estado estable del seccionador cuando se detecta una posición del seccionador abierto, cerrado o tierra, cuando además se detecta que se ha producido la señal fin de maniobra, cuando también se detecta que la manivela no se encuentra introducida para realizar una operación manual, y cuando además se detecta ausencia de órdenes de giro del motor del seccionador.
La invención comprende una fase en la que habiéndose detectado la señal de fin de maniobra, que la manivela no se encuentra introducida para realizar una operación manual, y habiéndose además detectado la ausencia de órdenes del giro...
Reivindicaciones:
1.PROCEDIMIENTO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS
en los que los seccionadores comprenden un accionamiento manual mecánico por manivela; un motor de accionamiento eléctrico del seccionador, para realizar una maniobra del seccionador posicionándolo en una posición seleccionada entre abierto, cerrado y tierra; un elemento de detección y señalización de fin de maniobra para indicar cuando ha finalizado una maniobra del seccionador; y un circuito de detección y señalización de cuando se produce sobrecorriente en el circuito del motor; caracterizado por que comprende:
detectar mediante palpadores cuando se produce una posición del seccionador seleccionada entre abierto, cerrado y tierra,
detectar cuando se inserta la manivela para accionamiento manual, detectar cuando se produce la señal de fin de maniobra,
detectar cuando se produce sobrecorriente en el motor; y en función de las anteriores detecciones realizadas comprende:
generar un estado seleccionado entre un estado estable, correspondiente a una posición de seccionador seleccionada entre abierto, cerrado y tierra; un estado de transito entre dos estados estables; un estado de error y un estado de recuperación a un estado estable desde un estado de error producido durante un estado de transito y generar una señalización indicativa de cada uno de los estados generado.
2.PROCEDIMIENTO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS, según reivindicación 1, caracterizado por
que se genera un estado estable del seccionador cuando se detecta una posición del seccionador seleccionada entre abierto, cerrado y tierra, cuando se detecta que se ha producido la señal fin de maniobra, cuando se detecta que la manivela no se encuentra introducida para realizar una operación manual, y cuando además se detecta ausencia de ordenes de giro del motor del seccionador.
3.PROCEDIMIENTO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS, según reivindicación 2, caracterizado por que comprende una fase en la que habiéndose detectado la señal fin de maniobra, que la manivela no se encuentra introducida para realizar una operación manual, y habiéndose además detectado la ausencia de ordenes de giro del motor del seccionador; si se da la circunstancia de que se pierde la señalización de un estado estable, se genera un estado de error de cableado y la señalización correspondiente indicativa de que se ha producido un error de cableado.
4.PROCEDIMIENTO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS, según reivindicación 1, caracterizado por que un estado de transito está seleccionado entre un transito de abierto a cerrado, un transito de abierto a tierra, un transito de cerrado a abierto, y un transito de tierra a abierto.
5.PROCEDIMIENTO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS, según reivindicación 4 , caracterizado por que el estado de transito de abierto a cerrado comprende las siguientes fases :
recibir una orden de giro del motor de paso del seccionador a la posición de cerrado desde la posición de abierto,
contar un primer tiempo máximo (tm1) para que se produzca una detección de perdida de señal de fin de maniobra, y durante dicho primer tiempo comprende incrementar un contador adicional y generar una señal interna de giro del motor a la posición de cerrado,
cuando se supera dicho primer tiempo máximo (tm1) sin detectar la señal de perdida de fin de maniobra se genera un estado de error y una señalización correspondiente a un estado de error,
cuando se detecta la señal de perdida de fin de maniobra durante el primer tiempo máximo (tm1) comprende contar, a partir de de dicha detección, un segundo tiempo máximo (tm2) durante el que se espera la detección de la pérdida de posición de seccionador abierto, se incrementa nuevamente el contador adicional, y se genera una orden interna de giro del motor a la posición de cerrado;
en caso de realizarse la anterior detección de pérdida de posición de seccionador abierto durante el segundo tiempo máximo (tm2) , comprende contar, a partir de de dicha detección, un tercer tiempo máximo (tm3) durante el que se espera la detección de la posición de seccionador cerrado, se genera una orden interna de giro del motor a la posición cerrado (ángulo muerto) , y en caso de no realizarse la anterior detección de perdida de posición de seccionador abierto durante el segundo tiempo máximo (tm2) se genera un estado de error y la señalización correspondiente,
en caso de que durante la cuenta del segundo tiempo máximo (tm2) se detecte una sobrecorriente de motor mantenida (por llegar al tope mecánico o agarrotamiento del motor) durante un cuarto tiempo (tm4) previamente establecido, se genera un estado de error no recuperable y la señalización correspondiente, en caso de no detectarse la posición de cerrado durante dicho tercer tiempo máximo (tm3) se genera un estado de error y la señalización correspondiente, y en caso de detectarse durante el transcurso del tercer tiempo máximo (tm3) la señal de posición de fin de maniobra sin que previamente se haya detectado la posición de cerrado se genera también un estado de error y la señalización correspondiente, y
en caso de detectarse la posición de cerrado durante el tercer tiempo (tm3) , comprende contar, a partir de dicha detección, un quinto tiempo máximo (tm5) durante el que se espera la detección de una señal de posición de fin de maniobra, se genera una orden interna de giro del motor a la posición cerrado (ángulo muerto) , se decrementa el contador adicional previamente incrementado y si no se detecta una señal de posición de fin de maniobra durante el quinto tiempo máximo (tm5) , o se detecta un cortocircuito en el motor se genera un estado de error y la señalización correspondiente,
en caso de detectarse una señal de posición de fin de maniobra durante el quinto tiempo máximo (tm5) , se genera un estado estable de seccionador cerrado y la señalización correspondiente,
en caso de que se llegue al fin del decremento del contador adicional sin que se detecte la señal de fin de maniobra se genera un estado de error adicional y la señalización correspondiente.
6.PROCEDIMIENTO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS, según reivindicación 4 , caracterizado por
que el estado de transito de abierto a tierra comprende las siguientes fases: recibir una orden de giro del motor de paso del seccionador a la posición de tierra desde la posición de abierto, contar un primer tiempo máximo (tm1) para que se produzca una detección de perdida de señal de fin de maniobra, y durante dicho primer tiempo comprende incrementar un contador adicional y generar una señal interna de giro del motor a la posición de cerrado,
generar un estado de error y la señalización correspondiente cuando se supera dicho primer tiempo máximo (tm1) sin detectar la señal de perdida de fin de maniobra,
Cuando se detecta la señal de perdida de fin de maniobra durante el primer tiempo máximo tm1 comprende contar, a partir de de dicha detección, un segundo tiempo máximo (tm2) durante el que se espera la detección de la pérdida de posición de seccionador abierto, se incrementa el contador adicional, y se genera una orden interna de giro del motor a la posición de tierra;
en caso de realizarse la anterior detección de pérdida de posición de seccionador abierto durante el segundo tiempo máximo (tm2) , comprende contar, a partir de de dicha detección, un sexto tiempo máximo (tm6) durante el que se espera la detección de la posición de seccionador tierra y se genera una orden interna de giro del motor a la posición cerrado (ángulo muerto) , y en caso de no realizarse la anterior detección de perdida de posición de seccionador abierto durante el segundo tiempo máximo (tm2) se genera un estado de error y la señalización correspondiente, En caso de que durante la cuenta del segundo tiempo máximo (tm2) se detecte una sobrecorriente de motor mantenida (por llegar al tope mecánico o agarrotamiento del motor) durante un cuarto tiempo tm4 previamente establecido, se genera un estado de error no recuperable y la señalización correspondiente,
en caso de no detectarse la posición de seccionador en tierra durante dicho sexto tiempo máximo tm6 se genera un estado de error y la señalización correspondiente, y en caso de detectarse durante el transcurso del sexto tiempo máximo (tm6) la señal de posición de fin de maniobra sin que previamente se haya detectado la posición de tierra se genera también un estado de error y la señalización correspondiente, y
en caso de detectarse la posición de tierra durante el sexto tiempo (tm6) , comprende contar, a partir de dicha detección, un quinto tiempo máximo tm5 durante el que se espera la detección de una señal de posición de fin de maniobra, se genera una orden interna de giro del motor a la posición cerrado (ángulo muerto) , se decrementa el contador adicional previamente incrementado y si no se detecta una señal de posición de fin de maniobra durante el quinto tiempo máximo (tm5) , o se detecta un cortocircuito en el motor se genera un estado de error y la señalización correspondiente,
en caso de detectarse una señal de posición de fin de maniobra durante el quinto tiempo máximo (tm5) , se genera un estado estable de tierra y la señalización correspondiente.
en caso de que se llegue al fin del decremento del contador adicional sin que se detecte la señal de fin de maniobra se genera un estado de error adicional y la señalización correspondiente.
7.PROCEDIMIENTO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS, según reivindicación 4, caracterizado por que el estado de transito de cerrado a abierto comprende las siguientes fases:
recibir una orden de giro del motor de paso del seccionador a la posición de abierto desde la posición de cerrado,
contar un primer tiempo máximo (tm1) para que se produzca una detección de perdida de señal de fin de maniobra, y durante dicho primer tiempo comprende incrementar un contador adicional y generar una señal interna de giro del motor a la posición de abierto,
generar un estado de error y la señalización correspondiente cuando se supera dicho primer tiempo máximo (tm1) sin detectar la señal de perdida de fin de maniobra,
cuando se detecta la señal de perdida de fin de maniobra durante el primer tiempo máximo (tm1) comprende contar, a partir de de dicha detección, un séptimo tiempo máximo (tm7) durante el que se espera la detección de la pérdida de posición de seccionador cerrado, se incrementa el contador adicional, y se genera una orden interna de giro del motor a la posición de abierto;
en caso de realizarse la anterior detección de pérdida de posición de seccionador cerrado durante el séptimo tiempo máximo (tm7) , comprende contar, a partir de de dicha detección, un octavo tiempo máximo (tm8) durante el que se espera la detección de la posición de seccionador abierto y se genera una orden interna de giro del motor a la posición abierto (ángulo muerto) ; y en caso de no realizarse la anterior detección de perdida de posición de seccionador abierto durante el octavo tiempo máximo (tm8) se genera un estado de error y la señalización correspondiente,
en caso de no detectarse la posición de abierto durante dicho octavo tiempo máximo (tm8) se genera un estado de error y la señalización correspondiente, y en caso de detectarse durante el transcurso del octavo tiempo máximo (tm8) la señal de posición de fin de maniobra sin que previamente se haya detectado la posición de abierto se genera también un estado de error y la señalización correspondiente , y
en caso de detectarse la posición de abierto durante el octavo tiempo (tm8) , comprende contar, a partir de dicha detección, un quinto tiempo máximo (tm5) durante el que se espera la detección de una señal de posición de fin de maniobra, se genera una orden interna de giro del motor a la posición abierto (ángulo muerto) , se decrementa el contador adicional previamente incrementado y si no se detecta una señal de posición de fin de maniobra durante el quinto tiempo máximo (tm5) , o se detecta un cortocircuito en el motor se genera un estado de error y la señalización correspondiente,
en caso de detectarse una señal de posición de fin de maniobra durante el quinto tiempo máximo (tm5) , se genera un estado estable abierto y la señalización correspondiente,
en caso de que se llegue al fin del decremento del contador adicional sin que se detecte la señal de fin de maniobra se genera un estado de error adicional y la señalización correspondiente.
8.PROCEDIMIENTO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS, según reivindicación 4 , caracterizado por que el estado de transito de tierra a abierto comprende las siguientes fases:
recibir una orden de giro del motor de paso del seccionador a la posición de abierto desde la posición de tierra,
contar un primer tiempo máximo (tm1) para que se produzca una detección de perdida de señal de fin de maniobra, y durante dicho primer tiempo comprende incrementar un contador adicional y generar una señal interna de giro del motor a la posición de abierto ,
generar un estado de error y la señalización correspondiente cuando se supera dicho primer tiempo máximo (tm1) sin detectar la señal de perdida de fin de maniobra,
cuando se detecta la señal de perdida de fin de maniobra durante el primer tiempo máximo (tm1) comprende contar, a partir de de dicha detección, un noveno tiempo máximo (tm9) durante el que se espera la detección de la pérdida de posición de seccionador en tierra, se incrementa un contador adicional, y se genera una orden interna de giro del motor a la posición de abierto;
en caso de realizarse la anterior detección de pérdida de posición de seccionador en tierra durante el noveno tiempo máximo (tm9) , comprende contar, a partir de dicha detección, un octavo tiempo máximo (tm8) durante el que se espera la detección de la posición de seccionador abierto y se genera una orden interna de giro del motor a la posición abierto (ángulo muerto) ; y en caso de no realizarse la anterior detección de perdida de posición de seccionador en tierra durante el noveno tiempo máximo (tm9) se genera un estado de error y la señalización correspondiente,
en caso de no detectarse la posición de abierto durante dicho octavo tiempo máximo (tm8) se genera un estado de error y la señalización correspondiente, y en caso de detectarse durante el transcurso del octavo tiempo máximo (tm8) la señal de posición de fin de maniobra sin que previamente se haya detectado la posición de abierto se genera también un estado de error y la señalización correspondiente , y
en caso de detectarse la posición de abierto durante el octavo tiempo (tm8) , comprende contar, a partir de dicha detección, un quinto tiempo máximo (tm5) durante el que se espera la detección de una señal de posición de fin de maniobra, se genera una orden interna de giro del motor a la posición abierto (ángulo muerto) y se decrementa el contador adicional previamente incrementado; y si no se detecta una señal de posición de fin de maniobra durante el quinto tiempo máximo (tm5) , o se detecta un cortocircuito en el motor se genera un estado de error y la señalización correspondiente,
en caso de detectarse una señal de posición de fin de maniobra durante el quinto tiempo máximo (tm5) , se genera un estado estable abierto y la señalización correspondiente,
en caso de que se llegue al fin del decremento del contador adicional sin que se detecte la señal de fin de maniobra se genera un estado de error adicional y la señalización correspondiente.
9.PROCEDIMIENTO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS, según reivindicación 1, caracterizado por
que el estado de recuperación está seleccionado entre una recuperación del seccionador desde un estado de error a cerrado, una recuperación desde un estado de error a abierto y una recuperación desde un estado de error a tierra.
10. PROCEDIMIENTO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS, según reivindicación 9 , caracterizado por que el estado de recuperación del seccionador desde un estado de error a cerrado se genera cuando se detecta la posición de cerrado durante un transito, no se ha detectado la señal de fin de maniobra, y existe una señal de permiso convencional de recuperación de posición cerradoabierto; y comprende las siguientes fases:
generar una orden interna de giro del motor a la posición de cerrado, contar un quinto tiempo máximo (tm5) para que se produzca una detección de señal de fin de maniobra, y en caso de realizar dicha detección se genera un
estado estable cerrado y la señalización
correspondiente,
generar un estado de error y la señalización
correspondiente cuando se supera dicho quinto tiempo máximo (tm5) sin detectar la señal de fin de maniobra,
cuando se detecta una sobrecorriente instantánea durante el quinto tiempo máximo (tm5) (sobre posicionado del motor) se bloquea el giro del motor y transcurrido un decimo tiempo fijo (tm10) se genera una orden interna de giro del motor en sentido contrario a la posición de cerrado y se cuenta un quinto tiempo máximo (tm5) durante el que se espera la detección de la señal de fin de maniobra,
generar un estado de error y la señalización correspondiente cuando se supera dicho quinto tiempo máximo (tm5) sin detectar la señal de fin de maniobra, y en caso de realizar dicha detección de fin de maniobra durante dicho quinto tiempo máximo (tm5) se genera un estado estable de posición cerrado y la señalización correspondiente.
11. PROCEDIMIENTO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS, según reivindicación 9, caracterizado por que el estado de recuperación del seccionador desde un estado de error a tierra se genera cuando se detecta la posición de tierra durante un transito, no se ha detectado la señal de fin de maniobra, y existe una señal de permiso convencional de recuperación de posición abierto-tierra; y comprende las siguientes fases:
generar una orden interna de giro del motor a la posición de tierra, contar un quinto tiempo máximo (tm5) para que se produzca una detección de señal de fin de maniobra, y en caso de realizar dicha detección se genera un
estado estable en tierra y la señalización
correspondiente,
generar un estado de error y la señalización
correspondiente cuando se supera dicho quinto tiempo máximo (tm5) sin detectar la señal de fin de maniobra,
Cuando se detecta una sobrecorriente instantánea durante el quinto tiempo máximo (tm5) (sobre posicionado del motor) se bloquea el giro del motor y transcurrido un undécimo tiempo fijo (tm11) se genera una orden interna de giro del motor en sentido contrario a la posición de tierra,
generar un estado de error y la señalización correspondiente cuando se supera dicho quinto tiempo (tm5) sin detectar la señal de fin de maniobra, y en caso de realizar dicha detección de fin de maniobra durante dicho undécimo tiempo fijo (tm11) se genera un estado estable en tierra y la señalización correspondiente.
12. PROCEDIMIENTO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS, según reivindicación 9, caracterizado por que el estado de recuperación del seccionador desde un estado de error a abierto está seleccionado entre una recuperación a abierto desde una posición de transito intermedia de cerrado, una recuperación a abierto desde una posición de transito intermedia de tierra, y una recuperación a abierto con perdida de la señal fin de maniobra.
13. PROCEDIMIENTO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS, según reivindicación 13, caracterizado por que el estado de recuperación a abierto desde una posición de transito intermedia de cerrado se genera cuando se detecta una posición intermedia de cerrado durante un transito y existe una señal de permiso convencional de recuperación de posición abierto-cerrado; y comprende las siguientes fases:
generar una orden interna de giro del motor hacia la posición de abierto, contar un octavo tiempo máximo (tm8) para que se produzca una detección de posición de seccionador
abierto,
generar un estado correspondiente en anterior detección, de caso er ror de y no la r señalizacealizarse ión la
mantener la orden interna de giro del motor hacia la posición de seccionador abierto en caso de realizase la anterior detección de posición de seccionador abierto, , y se cuenta un quinto tiempo (tm5) durante el cual se espera la detección de la señal de fin de maniobra,
cuando durante el transcurso del quinto tiempo (tm5) se detecta la señal de fin de maniobra, se genera un estado estable abierto y la señalización correspondiente, y en caso de no detectarse la señal de fin de maniobra durante el transcurso del quinto tiempo (tm5) se genera un estado de error y la señalización correspondiente,
también se genera en estado de error y la correspondiente señalización cuando durante el transcurso de dicho quinto tiempo (tm5) se pierde
la señalización de seccionador abierto.
14. PROCEDIMIENTO DE CONTROL ELECTRÓNICO DE
SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE
SUBESTACIONES ELÉCTRICAS, según reivindicación 12,
caracterizado por que el estado de recuperación a abierto desde una posición de transito intermedia de tierra se genera cuando se detecta una posición intermedia de tierra durante un transito y existe una señal de permiso convencional de recuperación de posición abierto-tierra; y comprende:
generar una orden interna de giro del motor hacia
la posición de abierto, contar un octavo tiempo máximo (tm8) para que se produzca una detección de posición de seccionador abierto,
en caso de no realizarse la anterior detección se genera un estado de error y la señalización correspondiente,
en caso de realizase la anterior detección, se mantiene la orden interna de giro del motor hacia la posición de seccionador abierto, y se cuenta un quinto tiempo máximo (tm5) durante el cual se espera la detección de la señal de fin de maniobra y,
se genera un estado de error y la señalización correspondiente en caso de que durante el transcurso del quinto tiempo (tm5) se pierda la detección de la posición de seccionador abierto,
cuando durante el transcurso del quinto tiempo (tm5) se detecta la señal de fin de maniobra, se genera un estado estable de seccionador abierto y la señalización y en caso de no detectarse la señal de fin de maniobra se genera un estado de error y la señalización correspondiente.
15. PROCEDIMIENTO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS, según reivindicaciones, 12, 13 y 14, caracterizado por que el estado de recuperación a abierto con perdida de la señal fin de maniobra, se genera cuando se detecta una posición de seccionador abierto durante un transito y existe una señal de permiso convencional de recuperación de posición abierto-cerrado; y comprende :
generar una orden interna de giro del motor en un sentido previamente seleccionado, contar un quinto tiempo máximo (tm5) para que se produzca una detección de señal de fin de maniobra,
cuando se realiza la anterior detección se genera un estado estable de seccionador abierto y la señalización correspondiente ,
cuando se pierde la detección de la posición de seccionador abierto durante el transcurso del quinto tiempo (tm5) se bloquea el giro del motor y transcurrido un doceavo tiempo fijo (tm12) se genera una orden interna de giro del motor en sentido contrario al previamente seleccionado y se genera una señalización correspondiente a un estado seleccionado entre un estado de recuperación de seccionador en cerrado y un estado de recuperación de seccionador en tierra, en los que se genera una orden interna de giro del motor en sentido contrario al previamente establecido en el estado de recuperación a abierto con perdida de la señal de fin de maniobra, seleccionada entre giro a la posición de cerrado y giro a la posición de tierra.
16. PROCEDIMIENTO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS, según reivindicación 1, caracterizado por que además comprende generar un estado de inicialización y la correspondiente señalización tras una puesta a cero del control electrónico, y tras el cual comprende generar un estado de decisión y la correspondiente señalización , en el que las entradas del control electrónico correspondientes a las detecciones realizadas de la reivindicación 1, determinan el estado inicial del control electrónico tras la puesta a cero.
17. PROCEDIMIENTO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS, según reivindicaciones anteriores, caracterizado por que las órdenes de giro del motor están seleccionadas entre órdenes remotas y órdenes locales.
18. PROCEDIMIENTO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS, según reivindicaciones anteriores, caracterizado por que cuando se genera un estado de error y la señalización correspondiente,
comprende generar señalización óptica de los diferentes estados de error producidos y de las diferentes causas que los producen, y además comprende bloquear todas las maniobras siguientes posibles hasta la subsanación del error producido.
19. DISPOSITIVO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS, caracterizado por que comprende un controlador de celda por cada seccionador previsto en la subestación, que está dotado de un autómata seccionador (1) que funciona de acuerdo al procedimiento de las reivindicaciones 1 a 18, y de un autómata de celda (6) que a su vez comprende un procesador que almacena las diferentes funciones correspondientes a cada tipo de celda convencional, y seleccionables mediante selectores (7) cuya posición se establece de acuerdo a la funcionalidad del tipo de celda a controlar; comprendiendo además el controlador de celda medios de señalización óptica (5) de los diferentes estados de errores producidos, medios de bloqueo de todas las maniobras siguientes posibles tras la generación de una señalización de estado de error, y entradas/salidas fijas (8 y 9) que se cablean en función del tipo de celda al que se aplica el controlador de celda y de acuerdo con la posición de los selectores (7) establecida.
20. DISPOSITIVO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE SUBESTACIONES ELÉCTRICAS, según reivindicación 19, caracterizado por que en el caso en que la cela comprenda dos seccionadores, cada uno gobernado por un controlador de celda, uno de los controladores de celda es un controlador maestro y el otro esclavo.
21. DISPOSITIVO DE CONTROL ELECTRÓNICO DE SECCIONADORES DE CELDAS DE MEDIA TENSIÓN DE
SUBESTACIONES ELÉCTRICAS, según reivindicación 19, caracterizado por que comprende una caja metálica 10 en la que se alojan los diferentes circuitos, que son accesibles mediante tapa desmontable, para formar un apantallamiento de Faraday; estando la caja metálica dotada en uno de sus laterales de conectores 11 laterales de conexión de las entradas y salidas de los diferentes circuitos.
Patentes similares o relacionadas:
Sistema de control para un aparato de conmutación eléctrica y un aparato de conmutación eléctrica relacionado, del 10 de Junio de 2020, de ABB SCHWEIZ AG: Un sistema de control para un aparato de conmutación eléctrica adaptado para instalarse en un circuito eléctrico de media o alta tensión, que comprende: […]
Dispositivo de señalización de una falla eléctrica en un aparato de protección eléctrica, y aparatos que lo componen, del 13 de Mayo de 2020, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Dispositivo de señalización de disparo de un aparato de protección eléctrica como un disyuntor alojado en una carcasa aislante. que contiene un par de contactos fijo […]
Sistema de interruptor conmutable por comunicación inalámbrica, del 5 de Febrero de 2020, de ASISTENTES DIGITALES, S.L: Sistema de interruptor conmutable por comunicación inalámbrica, destinado a intercalarse en un circuito de iluminación con interruptores conmutadores del […]
 Dispositivo de activación magnético para disyuntor, del 29 de Enero de 2020, de LSIS Co., Ltd: Dispositivo de activación magnético para un disyuntor, que comprende:
una parte de bobina de actuador que tiene un pistón (21 a) configurado […]
Dispositivo de activación magnético para disyuntor, del 29 de Enero de 2020, de LSIS Co., Ltd: Dispositivo de activación magnético para un disyuntor, que comprende:
una parte de bobina de actuador que tiene un pistón (21 a) configurado […]
Dispositivo de disparo magnético para disyuntor, del 6 de Noviembre de 2019, de LSIS Co., Ltd: Un dispositivo de disparo magnético para un disyuntor, comprendiendo el dispositivo de disparo magnético: una pieza de bobina del accionador que tiene un émbolo (21a) […]
Aparato eléctrico, sistema que comprende dicho aparato eléctrico y procedimiento realizado en dicho sistema, del 21 de Agosto de 2019, de LEGRAND FRANCE: Aparato eléctrico que comprende: - una caja (110; 210; 410') que comprende unos medios de posicionamiento (122, 123; 222; 600; 600'; 601) en un receptáculo de aparellaje […]
Un dispositivo de conmutación para una red de distribución de energía eléctrica de MT, del 7 de Agosto de 2019, de ABB SCHWEIZ AG: Dispositivo de conmutación para una red de distribución de energía eléctrica de MT, comprendiendo dicho dispositivo de conmutación contactos […]
Sensor antipinzamiento para un elemento de cierre de un vehículo de motor, del 3 de Julio de 2019, de Cooper Standard GmbH: Sensor antipinzamiento para un elemento de cierre de un vehículo de motor que se puede mover entre una posición de apertura y una posición […]