Alimentador para robots, medios de automatización y similares.
Un alimentador (1) para robots, medios de automatización y similares,
quecomprende un marco (2) que tiene un lecho de soporte (3) para las partes a ser alimentadasy medios de vision para reconocer dichas partes a ser alimentadas, dicho lecho de soporte(3) estando conectado a medios para la rotación alrededor de una dirección que essustancialmente perpendicular al piano de disposición de dichas partes a ser alimentadas,caracterizado por el hecho de que comprende medios de generación de impulsos que estanconectados a dicho marco (2) y operan sobre dicho lecho de soporte (3), en el cual losimpulsos activados por dichos medios de generación de impulsos son sustancialmentenormales respecto del piano de disposición de los objetos a ser sujetados, para hacer quesalten la parte o partes que se encuentran cerca del punto de contacto con dicho lecho desoporte (3) cambiando completamente su orientación espacial.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2009/062917.
Solicitante: Ars S.r.l.
Nacionalidad solicitante: Italia.
Dirección: Via P. Gobetti 19 52100 Arezzo ITALIA.
Inventor/es: MAZZINI,MARCO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G27/24 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 27/00 Transportadores de sacudidas. › Dispositivos electromagnéticos.
- B65G47/14 B65G […] › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › colocando o presentando los objetos por medios mecánicos o neumáticos durante la alimentación (durante el transporte por el transportador B65G 47/24, B65G 47/26).
PDF original: ES-2422906_T3.pdf
Fragmento de la descripción:
ALIMENTADOR PARA ROBOTS, MEDIOS DE AUTOMATIZACIÓN Y SIMILARES
Campo técnico
La presente invención hace referencia a un alimentador para robots equipado con visión artificial, medios de automatización y similares, según el preámbulo de la reivindicación 1 y un método para la sujeción según el preámbulo de la reivindicación 13.
lO La invención presentada aquí está dirigida al campo de la automatización industrial o en cualquier caso a todos los campos relacionados con la introducción de un sistema automático robotizado, donde la demanda para sistemas robotizados flexibles capaces de cumplir los requisitos más dispares está creciendo continuamente.
En particular, los campos industriales de uso concebidos para el alimentador segUn la invención son caucho, plásticos y otros materiales sintéticos, vidrio, alimentación, cosmética, fannacéutica, industria médica, componentes para coches, electrodomésticos,
ordenadores, electrónica de consumo, fornituras de metal, la industria maderera y la industria de accesorios del mueble, etcétera.
Estado de la técnica
De hecho, se siente cada vez más la necesidad de alimentar diferentes sistemas de automatización industriales según diferentes requisitos de producción. Actualmente, los productos industriales están de hecho caracterizados por una vida útil incluso más corta,
una disminución de los volúmenes de producción y por la consiguiente necesidad de poder adaptar con rapidez las plantas a los requisitos de producción cambiantes, mientras se intenta minimizar los costes de esta adaptación.
Esta facilidad de adaptación de las plantas a diferentes volúmenes de producción y la adaptación de la producción a diferentes productos finales a menudo son la única justificación económica que mantiene vivo el sistema de producción automático, evitando re
currir a sistemas manuales, los cuales generalmente son más caros y lentos pero mucho más versátiles y fuerzan a las empresas a trasladar las plantas de producción a países donde el trabajo es más barato.
Son conocidos alimentadores que están controlados por robots del tipo Cartesiano, antropomórfico, cilíndrico, etcétera.
Estos alimentadores están provistos de sistemas de visión artificial, tales como por
ejemplo cámaras de televisión lineales, de matriz, de 3-D y similares, que requieren tales condiciones de luz como para poder reconocer las partes mediante una cámara de televisión. Las condiciones de iluminación pueden ser creadas por iluminación externa desde arriba o mediante un dispositivo de retroiluminaeión dispuesto normalmente debajo del
lecho que soporta las partes.
El alimentador es llenado desde el exterior periódica y manualmente mediante una tolva con un elevador de tipo correa o de otras formas.
El sistema de visión artificial reconoce la parte cargada sobre el alimentador que es necesaria para la producción y el robot la recoge.
El documento US-A-5853078 muestra un alimentador para robots y un método para la sujeción según el preámbulo de las reivindicaciones 1 y 13 respectivamente.
Estos dispositivos conocidos producen el avance de las partes que constituyen la alimentación para los robots mediante la agitación mecánica y/o el movimiento lineal obtenido mediante correas motorizadas.
Un problema de estos alimentadores se debe al hecho de que cuando las partes a ser alimentadas comprenden a1 menos una porción cilíndrica, tienden a rodar, ofreciendo estadísticamente con más frecuencia al robot partes que no pueden ser sujetadas con facilidad, dejando de alimentarlo.
Con este tipo de alimentador, sea de avance lineal y/o por vibración, no es posible variar en todos los casos la posición y la disposición de las partes en la superficie, de esta forma ralentizando la cadena de producción con severos costes para la producción final.
Además, debido a la dificil accesibilidad a las partes internas de alimentadores conocidos, limpiar el sistema de retroalimentación es más complicado, penalizando la calidad del sistema de visión y por lo tanto La eficiencia de la producción.
Otra desventaja de un dispositivo de este tipo es que una vez que se ha realizado la recogida, no siempre es posible variar con facilidad o rapidez la posición y la disposición de las partes a ser sujetadas en el lecho y por lo tanto tales partes deben ser devueltas al ciclo de producción junto con la nueva carga de partes a ser sujetadas.
Al final de la recogida, por lo tanto, las partes que han permanecido en el lecho son descargadas del alimentador y reintroducidas en el proceso descrito anteriormente de forma que OCUlTa un ciclo continuo (lazo) .
Las partes son reintroducidas durante el paso para cargar mediante conductos, rampas y otras cintas transportadoras.
Puede deducirse con facilidad que tal método es demasiado lento y laborioso, puesto que la operación de recogida finaliza con el agotamiento de todas las partes, a veces llevando un número indefinido de cicl os que es dificil de predecir.
Además de esto, puesto que el robot debe descargar el alimentador al final de la recogida y luego cargarlo de nuevo, aCUITen tiempos no productivos o de parada demasiado largos.
y por último, pero no menos importante, debido a lo anterior con el fin de devolver las partes rechazadas al ciclo es necesario proveer un gran espacio que sea suficiente para permitir que las partes rechazadas St: transfieran desde la salida a la entrada del alimentador por medio de movimiento, tales como cintas transportadoras, rampas y conductos. Estos medios, que a menudo provocan atascos especialmente durante la vibración,
GO
requieren la constante intervención de un operario asignado y por lo tanto afectan de modo importante a la economía del dispositivo.
Explicación de la invención El objetivo de la presente invención es eliminar los inconvenientes señalados anteriormente en tipos conocidos de alimentadores para robots, medios de automatización y similares, permitiendo a partes que comprenden porciones cilíndricas cambiar su disposición y posición en la superficie de forma que el robot pueda ser alimentado sin problemas.
Dentro de este objetivo, un objeto de la invención es proveer un alimentador para robots, medios de automatización y similares que permita el acceso fácil a las partes internas simplificando la operación para limpiar el sistema de visión.
Otro objeto de la invención es proveer un alimentador para robots, medios de automatización y similares que sea fácil de montar con medios que estén fácil y comercialmente disponibles utilizando materiales utilizados comúnmente de forma que el alimentador sea económicamente competitivo.
Otro objeto de la invención es proveer un alimentador que sea capaz de permitir la provisión de un método de sujeción que limite la asistencia de personal asignado durante la producción, intentando por lo tanto evitar el atasco de las partes durante cada ciclo.
Otro objeto de la invención es limitar el número de ciclos al que cada articulo ha de ser sometido antes de que sea seleccionado por los medios de visión y luego recogido por el robot.
Este objetivo de la invención, estos objetos y otros que resultarán aparentes de mejor modo a continuación se consiguen mediante un alimentador para robots, medios de automatización y similares, según la reivindicación 1 anexada y por un método de sujeción según la reivindicación 13 anexada.
Breve descripción de los dibujos Otras caracteristicas y ventajas de la invención resultarán aparentes de mejor modo a partir de la siguiente descripción detallada de un ejemplo de realización preferido pero no exclusivo del alimentador para robots, medios de automatización y similares, ilustrado mediante ejemplo no !imitador por los dibujos que acompañan, en los que:
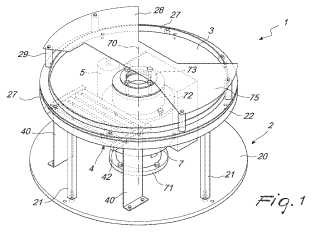
La figura 1 es una vista de perspec:tiva de un alimentador según la invención;
La figura 2 es una vista de plano superior del alimentador;
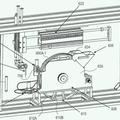
La figura 3 es una vista de sección del alimentador, tomada a lo largo de la línea lll-lll de la figura 2;
La figura 4 es una vista de sección del alimentador, tomada a lo largo de la línea IV-IV de la figura 2;
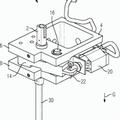
La figura 5 es una vista de perspe, :::tiva del alimentador provisto de medios de su-
Jeción.
Fonnas de realizar la invención Con referencia a las figuras, un alimentador para robots, medios de automatización y similares según la invención, generalmente designado por el número de referencia 1, comprende un marco 2, que tiene un le:cho de soporte 3 para las partes a ser alimentadas y medios de visión... [Seguir leyendo]
Reivindicaciones:
1. Un alimentador (1) para robots, medios de automatización y similares, que comprende un marco (2) que tiene un lecho de soporte (3) para las partes a ser alimenta· das y medios de visión para reconocer dichas partes a ser alimentadas, dicho lecho de soporte (3) estando conectado a medios para la rotación alrededor de una dirección que es sustancialmente perpendicular al plano de disposición de dichas partes a ser alimentadas, caracterizado por el hecho de que comprende medios de generación de impulsos que están conectados a dicho marco (2) y operan sobre dicho lecho de soporte (3) , en el cual los impulsos activados por dichos medios de generación de impulsos son sustancialmente nonnales respecto del plano de disposición de los objetos a ser sujetados, para hacer que salten la parte o partes que se encuentran cerca del punto de contacto con dicho lecho de soporte (3) cambiando completamente su orientación espaciaL
2. El alimentador según la reivindicación 1, caracterizado por el hecho de que dicho marco (2) comprende un plano base (20) que soporta columnas de soporte (21) para un anillo de soporte (22) para dicho lecho de soporte (3) .
3. El alimentador según una o más de las anteriores reivindicaciones, caracterizado por el hecho de Que dichos medios de rotación comprenden un motor (7) Que está conectado a dicho marco (2) y es dependiente de las características de dichas partes a ser alimentadas.
4. El alimentador según una o más de las anteriores reivindicaciones, caracterizado por el hecho de que dicha dirección que es sustancialmente perpendicular a dicho plano de disposición de dichas partes a ser alimentadas coincide con el eje (70) del eje motor de dicho motor (7) .
5. El alimentador según una o más de las anteriores reivindicaciones, caracterizado por el hecho de que dicho lecho de soporte (3) está asociado conjuntamente con dicho eje motor.
6. El alimentador según una o más de las anteriores reivindicaciones, caracterizado por el hecho de Que dichos medios de generación de impulsos comprenden un imán de rebote (5) que está conectado a dicho marco (2) y opera en la superficie interna (30) de dicho lecho de soporte (3) .
7. El alimentador según la reivindicación 6, caracterizado por el hecho de que dichos medios de generación de impulsos comprenden una corredera móvil (50) para el movimiento de dicho imán de rebote (5) que está conectado a dicho plano base (20) .
8. El alimentador según una o más de las anteriores reivindicaciones, caracterizado por el hecho de que dichos medios de visión comprenden medios de iluminación aso· ciados con dicho marco (2) .
9. El alimentador según las reivindicaciones 2 y 8, caracterizado por el hecho de que dichos medios de iluminación comprenden un montaje de iluminación (4) que está soportado por un marco de soporte (40) asociado con dicho plano base (20) .
10. El alimentador según una o más de las anteriores reivindicaciones, caracterizado por el hecho de que dichos medios de generación de impulsos comprenden un actuador operado neumáticamente que está conectado a dicho marco (2) y opera en la superficie interna (30) de dicho lecho de sopor!" (3) .
. El alimentador según una o más de las anteriores reivindicaciones, caracterizado por el hecho de que comprende med:ios de sujeción para sujetar al menos una de dichas partes (9) a ser sujetada, que están controladas por dichos medios de visión.
12. El alimentador según la reivindicación 11, caracterizado por el hecho de que dichos medios de sujeción comprenden tUl brazo móvil (12) que tiene una mordaza de enganche (13) , dicho brazo móvil (12) siendo retenido para la rotación alrededor de una dirección pivotante (60) que es paralela a dicho eje (70) y estando además adaptado para moverse a lo largo de una dirección que es nonnal a dicho lecho de soporte (3) .
13. Un método para sujetar al menos una parte de un alimentador por un robot, que comprende los pasos de cargar el lecho de soporte (3) de dicho alimentador con dichas partes (9) a ser sujetadas, eligiendo al menos una de dichas partes (9) a ser sujetada mediante medios de visión para el reconocimiento de las partes a ser alimentadas, dichos medios de visión estando conectados a dicho alimentador y recogiendo dicha al menos una de dichas partes (9) a ser sujetada, durante la sucesión de dichos pasos dichas partes
(9) a ser sujetadas moviéndose continuamente, caracterizado por el hecho de que comprende un paso para variar la orientación espacial de dichas partes (9) a ser sujetadas en dicho lecho de soporte (3) , dicho paso de variar la orientación espacial comprendiendo una diseminación de dichas partes (9) a st:r sujetadas por la actuación de medios de generación de impulsos, en donde los impulsos activados por dichos medios de generación de impulsos son sustancialmente nonnales re:specto del plano de disposición de los objetos a ser sujetados, para hacer que salten la parte o partes que están cerca del punto de contacto con dicho lecho de soporte (3) cambiando completamente su orientación espacia1.
14. El método según la reivindicación 13, caracterizado por el hecho de que la carga de dicho lecho de soporte (3) con dichas partes (9) a ser sujetadas es realizada continuamente.
Patentes similares o relacionadas:
DISPOSITIVO ORIENTADOR DE ENVASES Y MÁQUINA POSICIONADORA QUE LO PORTA, del 7 de Noviembre de 2019, de TRAKTECH CONTRUCCIONS MECANIQUES, S.L: Dispositivo posicionador de envases y máquina posicionadora que lo porta. Es utilizable con envase con cuello y boca. Comprende un embudo cuyos bordes están formados […]
Aparato de transporte con correa de vacío, del 24 de Julio de 2019, de QUALYSENSE AG: Un aparato para transportar partículas , incluyendo el aparato: una correa transportadora sinfín que tiene una pluralidad de […]
Dispositivo para separar objetos de ensayo, del 17 de Julio de 2019, de KRAEMER, THILO: Dispositivo para separar objetos de ensayo que comprende al menos un primer disco giratorio interno y un segundo disco giratorio externo , en […]
Cuba vibratoria para el suministro continuo de pequeñas piezas, del 27 de Marzo de 2019, de INTEC INDUSTRIAS TECNICAS S.L.: Cuba vibratoria para el suministro continuo de pequeñas piezas almacenadas sin orden en dicha cuba , dicha cuba presentando una pared cónica y un fondo […]
MÁQUINA Y PROCEDIMIENTO PARA POSICIONAR OBJETOS, del 22 de Marzo de 2019, de MULET VALLES,TOMAS: Máquina y procedimiento para posicionar objetos. Dicha máquina comprende una tolva de carga formada por un cuerpo envolvente estático, delimitado por una base de […]
Procedimiento y dispositivo para la alimentación de piezas de moldeo por inyección, del 20 de Febrero de 2019, de HEKUMA GMBH: Procedimiento para la alineación de elementos de filtro (F) destinados para la alimentación de piezas de moldeo por inyección, en particular de puntas de pipeta (P), […]
 Dispositivo para la separación de objetos con forma esférica o cilíndrica, del 31 de Octubre de 2018, de SIEMENS HEALTHCARE DIAGNOSTICS PRODUCTS GMBH: Dispositivo para la separación de objetos en forma de varilla o de esfera, que comprende una palanca provista con una perforación , donde la perforación […]
Dispositivo para la separación de objetos con forma esférica o cilíndrica, del 31 de Octubre de 2018, de SIEMENS HEALTHCARE DIAGNOSTICS PRODUCTS GMBH: Dispositivo para la separación de objetos en forma de varilla o de esfera, que comprende una palanca provista con una perforación , donde la perforación […]
 Sistema analítico con transporte de capilar, del 5 de Octubre de 2018, de BECKMAN COULTER, INC.: Sistema analítico que comprende:
una unidad de dispensador de capilares que comprende un depósito de almacenamiento configurado para almacenar una pluralidad […]
Sistema analítico con transporte de capilar, del 5 de Octubre de 2018, de BECKMAN COULTER, INC.: Sistema analítico que comprende:
una unidad de dispensador de capilares que comprende un depósito de almacenamiento configurado para almacenar una pluralidad […]