Alimentador en línea de movimiento continuo.
Alimentación (100, 300) de producto en línea que comprende:
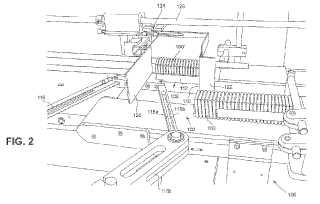
una línea (102,
302a) de entrada de producto configurada para recibir un suministro contiguo de productos, estando la línea de entrada de producto configurada para guiar los productos en movimiento continuo a lo largo de un trayecto de desplazamiento;
una línea (106, 306) de envasado configurada para recibir grupos separados de los productos desde la línea de entrada; y
una unidad (104, 304a) de alimentador configurada para separar un grupo de productos del suministro contiguo de productos en la línea de entrada de producto y mover el grupo de productos a la línea de envasado, incluyendo el grupo separado de productos un número predeterminado de productos de la línea de entrada de producto incluyendo la unidad de alimentador:
una placa (108, 308) de alimentador;
una placa (120, 326) de soporte de producto, definiendo la placa de soporte de producto un extremo del trayecto de desplazamiento de productos a lo largo de la línea de entrada de producto y estando configurada para soportar los productos en una posición vertical en ausencia de la placa de alimentador;
una placa (122, 328) de alineación situada a lo largo de un lado del trayecto de desplazamiento de productos en la línea de entrada de producto, manteniendo la placa de alineación una posición relativa constante respecto a la placa de soporte de producto y guiando los productos a lo largo del trayecto de desplazamiento hacia la placa de soporte.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2010/030402.
Solicitante: Bosch Packaging Technology, Inc.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 869 S. Knowles Avenue New Richmond, WI 54017 ESTADOS UNIDOS DE AMERICA.
Inventor/es: STAHL,KEENAN W.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65B23/14 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65B MAQUINAS, APARATOS, DISPOSITIVOS O PROCEDIMIENTOS DE EMBALAJE DE OBJETOS O MATERIALES; DESEMBALAJE (dispositivos para la colocación en paquetes y el prensado de puros A24C 1/44; dispositivos para tensar y fijar ataduras adaptadas para ser soportadas por el objeto u objetos a fijar B25B 25/00; colocación de cierres en botellas, tarros o recipientes análogos B67B 1/00 - B67B 6/00; limpieza, llenado y cierre simultáneo de botellas B67C 7/00; vaciado de botellas, jarras, latas, cubas, barriles o contenedores similares B67C 9/00). › B65B 23/00 Embalaje de objetos frágiles o sensibles a los golpes, que no sean botellas; Desembalado de huevos (metido de objetos en un medio antichoque B65B 55/20). › Formación de grupos de galletas.
- B65B35/40 B65B […] › B65B 35/00 Suministro, alimentación, disposición u orientación de artículos a ser empaquetados. › por empujadores oscilantes o de movimiento alternativo.
- B65B35/54 B65B 35/00 […] › Alimentación de artículos por vías múltiples hacia un solo puesto de embalaje.
- B65G47/08 B65 […] › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › espaciando o agrupando los objetos durante la alimentación (durante el transporte por el transportador B65G 47/28).
PDF original: ES-2418533_T3.pdf
Fragmento de la descripción:
Alimentador en línea de movimiento continuo Descripción La presente solicitud se refiere a un alimentador en línea de movimiento continuo, un método correspondiente de suministro de productos en una línea de envasado, un sistema correspondiente de envasado de producto, y un conjunto correspondiente de alimentador de galletas en línea.
El documento US 3.315.783 A da a conocer un alimentador de producto de velocidad variable que tiene un ciclo rápido-lento en el que un grupo de productos se separan de un conjunto de productos contiguo a velocidad lenta, y se aceleran hacia una maquinaria de envasado a velocidad alta.
Los documentos FR 2 620 689 A1 y EP 0 004 428 A1 describen cada uno un alimentador de producto vertical que usa de manera configurada un empujador transversal que puede empujar a un área lateral, objetos seleccionados para formar la pila deseada sin romperlos, basándose en un conjunto definido de paradas.
El documento US 2004/173959 A1 da a conocer un alimentador de producto de velocidad variable que tiene un ciclo rápido-lento en el que un grupo de productos se separan de un conjunto de productos contiguo a velocidad lenta, y son empujados hacia una compuerta de liberación a velocidad alta.
Antecedentes Los alimentadores en línea se usan normalmente en líneas de envasado para segmentar y envolver grupos de productos. Por ejemplo, productos que son individuales, separables, y de tamaño uniforme pueden alimentarse a un alimentador en línea, que a su vez separa los productos en grupos uniformes para el envasado. Productos típicos envasados usando un alimentador en línea pueden incluir galletas, galletas saladas, u otros alimentos secos que se envasan de manera lineal.
Los alimentadores en línea existentes usados en las líneas de envasado para estos productos alimenticios reciben un suministro lineal contiguo de los productos. El suministro lineal de productos se separa mediante una unidad mecánica dimensionada para seleccionar un número predeterminado, constante de productos para cada envase, separar ese grupo de productos del suministro lineal, y encaminarlo hacia un componente que aplica el envasado. En ciertas unidades, el número de productos de tamaño unitario de envase se mueve a una línea de suministro lineal secundaria que conduce desde el alimentador en línea a módulos de envasado adicionales (por ejemplo, según se requiera para envolver o procesar de otro modo el suministro segmentado de productos) .
Los alimentadores en línea existentes requieren normalmente pausar la alimentación de entrada contigua de productos mientras que la unidad mecánica separa cada grupo de productos. Esta pausa permite a la unidad de separación mecánica separar limpiamente un grupo de productos y encaminar ese grupo a la línea de suministro lineal secundaria. Sin embargo, al requerir pausar la alimentación de entrada de productos, el rendimiento de productos en las líneas de envasado es limitado. Además, las unidades mecánicas existentes usadas para segmentar la alimentación de entrada dependen en gran medida del espesor o tamaño de los productos recibidos, y no pueden ajustarse fácilmente para diferentes productos o tamaños de envase.
Por éstos y otros motivos, son deseables mejoras.
Sumario Según la siguiente descripción, el anterior y otros problemas se abordan mediante lo siguiente:
En un primer aspecto, se da a conocer un alimentador de producto en línea tal como se define en la reivindicación 1. El alimentador de producto en línea incluye una línea de entrada de producto configurada para recibir un suministro contiguo de productos y configurada para guiar los productos en movimiento continuo a lo largo de un trayecto de desplazamiento. El alimentador de producto en línea también incluye una línea de envasado configurada para recibir grupos separados de los productos desde la línea de entrada de producto. El alimentador en línea incluye además una unidad de alimentador configurada para separar grupos de productos del suministro contiguo de productos en la línea de entrada de producto y mover el grupo de productos a la línea de envasado, incluyendo cada uno de los grupos separados de productos un número predeterminado de productos de la línea de entrada de producto.
En un segundo aspecto, se da a conocer un método de suministro de productos en una línea de envasado tal como se define en la reivindicación 8. El método incluye recibir un suministro contiguo de productos a lo largo de una línea de entrada de producto, estando la línea contigua de productos en movimiento continuo a lo largo de un trayecto de desplazamiento. El método incluye además, mientras que la línea de productos permanece en movimiento continuo a lo largo del trayecto de desplazamiento, retraer una placa de alimentador que se encuentra en el trayecto de desplazamiento a una posición lateral al suministro de productos en el trayecto de desplazamiento, incluyendo la placa de alimentador una superficie que entra en contacto con un producto de extremo en el suministro de productos mientras que la placa de alimentador está dentro del trayecto de desplazamiento. El método también incluye, mientras que la línea de productos permanece en movimiento continuo a lo largo del trayecto de desplazamiento, mover la placa de alimentador a lo largo de un lado del trayecto de desplazamiento para seleccionar un grupo de productos de la línea contigua de productos. El método incluye además, mientras que la línea de productos permanece en movimiento continuo a lo largo del trayecto de desplazamiento, accionar la placa de alimentador para separar el grupo de productos de la línea contigua de productos y mover el grupo de productos a una línea de envasado.
En un tercer aspecto, se da a conocer un sistema de envasado de producto tal como se define en la reivindicación 10. El sistema de envasado de producto incluye una línea de entrada de producto configurada para recibir un suministro contiguo de productos, estando la línea de entrada de producto configurada para guiar los productos en movimiento continuo a lo largo de un trayecto de desplazamiento. El sistema de envasado de producto también incluye una línea de envasado configurada para recibir grupos separados de los productos desde la línea de entrada de producto y encaminar los grupos de productos a una envasadora de producto. El sistema de envasado de producto incluye además una unidad de alimentador configurada para separar grupos de productos del suministro contiguo de productos en la línea de entrada de producto y mover el grupo de productos a la línea de envasado, incluyendo el grupo separado de productos un número predeterminado de productos de la línea de entrada de producto. El sistema de envasado de producto incluye una envasadora de producto configurada para aplicar envasado a los grupos de productos recibidos a lo largo de la línea de envasado.
En un cuarto aspecto, se da a conocer un conjunto de alimentador de galletas en línea tal como se define en la reivindicación 13. El conjunto de alimentador de galletas en línea incluye una línea de entrada de producto configurada para recibir un suministro contiguo de galletas y configurado para guiar las galletas en movimiento continuo a lo largo de un trayecto de desplazamiento. El conjunto incluye además una línea de envasado configurada para recibir grupos separados de las galletas desde la línea de entrada de producto. El conjunto también incluye una unidad de alimentador configurada para separar grupos de galletas del suministro contiguo de galletas en la línea de entrada de producto y mover el grupo de galletas a la línea de envasado, incluyendo el grupo separado de galletas un número predeterminado de productos de la línea de entrada de producto. La unidad de alimentador incluye una placa de alimentador que incluye una superficie de soporte y una superficie guía, así como una placa de soporte de producto que define un extremo del trayecto de desplazamiento de productos a lo largo de la línea de entrada de producto y configurada para soportar las galletas en una posición vertical en ausencia de la placa de alimentador. La unidad de alimentador también incluye una placa de alineación situada a lo largo de un lado del trayecto de desplazamiento de las galletas en la línea de entrada de producto, manteniendo la placa de alineación una posición relativa constante respecto a la placa de soporte de producto y guiando las galletas a lo largo del trayecto de desplazamiento hacia la placa de soporte. La unidad de alimentador incluye un conjunto de brazo de robot que incluye una pluralidad de brazos de accionamiento conectados a un punto de enlace en la placa de alimentador. La superficie de soporte es aproximadamente paralela a la placa de soporte de producto y está... [Seguir leyendo]
Reivindicaciones:
1. Alimentación (100, 300) de producto en línea que comprende:
una línea (102, 302a) de entrada de producto configurada para recibir un suministro contiguo de productos, estando la línea de entrada de producto configurada para guiar los productos en movimiento continuo a lo largo de un trayecto de desplazamiento;
una línea (106, 306) de envasado configurada para recibir grupos separados de los productos desde la línea de entrada; y
una unidad (104, 304a) de alimentador configurada para separar un grupo de productos del suministro contiguo de productos en la línea de entrada de producto y mover el grupo de productos a la línea de envasado, incluyendo el grupo separado de productos un número predeterminado de productos de la línea de entrada de producto incluyendo la unidad de alimentador:
una placa (108, 308) de alimentador;
una placa (120, 326) de soporte de producto, definiendo la placa de soporte de producto un extremo del trayecto de desplazamiento de productos a lo largo de la línea de entrada de producto y estando configurada para soportar los productos en una posición vertical en ausencia de la placa de alimentador;
una placa (122, 328) de alineación situada a lo largo de un lado del trayecto de desplazamiento de productos en la línea de entrada de producto, manteniendo la placa de alineación una posición relativa constante respecto a la placa de soporte de producto y guiando los productos a lo largo del trayecto de desplazamiento hacia la placa de soporte.
2. Alimentador de producto en línea según la reivindicación 1, que comprende además un conjunto (114, 314) de brazo de robot conectado a la placa (108, 308) de alimentador.
3. Alimentador en línea según la reivindicación 2, en el que el conjunto de brazo de robot incluye una pluralidad de brazos (116a-b, 316a-b) de accionamiento conectados a un punto de enlace en la placa de alimentador.
4. Alimentador de producto en línea según la reivindicación 1, en el que la placa de alimentador incluye una superficie (110, 310) de soporte y una superficie (112, 312) guía, siendo la superficie de soporte aproximadamente paralela a la placa de soporte de producto y estando configurada para soportar los productos en una posición vertical en ausencia de la placa de soporte de producto, siendo la superficie guía aproximadamente paralela a la placa guía y estando configurada para guiar el grupo de productos a la línea de envasado.
5. Alimentador de producto en línea según la reivindicación 4, en el que la longitud de la superficie (112, 312) guía al menos define el tamaño del grupo de productos.
6. Alimentador de producto en línea según la reivindicación 1, que comprende además:
una segunda línea (302b) de entrada de producto configurada para recibir un segundo suministro contiguo de productos, estando la línea de entrada de producto configurada para guiar los productos en movimiento continuo a lo largo de un segundo trayecto de desplazamiento; y
una segunda unidad (304b) de alimentador configurada para separar grupos de productos del segundo suministro contiguo de productos en la segunda línea de entrada de producto y mover los grupos de productos a la línea de envasado.
7. Alimentador de producto en línea según la reivindicación 1, en el que el suministro contiguo de productos incluye galletas.
8. Método de suministro de productos en una línea de envasado, comprendiendo el método:
recibir un suministro contiguo de productos a lo largo de una línea (102, 302a) de entrada de producto, guiando la línea de entrada de producto la línea contigua de productos en movimiento continuo a lo largo de un trayecto de desplazamiento;
mientras que la línea de productos permanece en movimiento continuo a lo largo del trayecto de desplazamiento, retraer (204) una placa (108, 308) de alimentador que se encuentra en el trayecto de desplazamiento a una posición lateral al suministro de productos en el trayecto de desplazamiento, incluyendo la placa de alimentador una superficie que entra en contacto con un producto de extremo en el suministro de productos mientras que la placa de alimentador está dentro del trayecto de desplazamiento;
mientras que la línea de productos permanece en movimiento continuo a lo largo del trayecto de desplazamiento, mover (206) la placa (108, 308) de alimentador a lo largo de un lado del trayecto de desplazamiento para seleccionar un grupo de productos de la línea contigua de productos, y mientras que se mueve la placa (108, 308) de alimentador a lo largo de un lado del trayecto de desplazamiento, entrar en contacto con el producto de extremo en el suministro de productos con una placa (120, 326) de soporte de producto; y
mientras que la línea de productos permanece en movimiento continuo a lo largo del trayecto de desplazamiento, accionar (208) la placa (108, 308) de alimentador para separar el grupo de productos de la línea contigua de productos y mover el grupo de productos a una línea de envasado mientras que se mantiene la alineación de la línea contigua de productos con una placa (122, 328) de alineación situada a lo largo de un lado del trayecto de desplazamiento.
9. Método según la reivindicación 8, que comprende además inicializar una pluralidad de ajustes de envasado de producto asociados con un alimentador de producto en línea antes de recibir el suministro contiguo de productos a lo largo de la línea de entrada de producto.
10. Sistema de envasado de producto que comprende:
el alimentador (100, 300) de producto en línea según la reivindicación 1, y
una envasadora (16) de producto configurada para aplicar envasado a los grupos de productos recibidos a lo largo de la línea de envasado.
11. Sistema de envasado de producto según la reivindicación 10, que comprende además una unidad (22) de control conectada de manera comunicativa a la línea de entrada de producto, línea de envasado, unidad de alimentador y envasadora de producto, proporcionando la unidad de control control electrónico del sistema de envasado de producto.
12. Sistema de envasado de producto según la reivindicación 10, que comprende además:
una segunda línea (302b) de entrada de producto configurada para recibir un segundo suministro contiguo de productos, estando la segunda línea de entrada de producto configurada para guiar los productos en movimiento continuo a lo largo de un segundo trayecto de desplazamiento; y
una segunda unidad (304b) de alimentador configurada para separar grupos de productos del segundo suministro contiguo de productos en la segunda línea de entrada de producto y mover los grupos separados de productos a la línea de envasado.
13. Conjunto de alimentador de galletas en línea que comprende: el alimentador de producto en línea según la reivindicación 1,
en el que la placa (108, 308) de alimentador incluye una superficie (110, 310) de soporte y una superficie (112, 312) guía en el que la unidad (104, 304a) de alimentador incluye un conjunto de brazo de robot que incluye una pluralidad de brazos de accionamiento conectados a un punto de enlace en la placa de alimentador;
en el que la superficie (110, 310) de soporte es aproximadamente paralela a la placa de soporte de producto configurada para soportar las galletas en una posición vertical en ausencia de la placa de soporte de producto, y en el que la superficie guía es aproximadamente paralela a la placa guía y está configurada para guiar el grupo de galletas a la línea de envasado.
14. Conjunto de alimentador de galletas en línea según la reivindicación 13, que comprende además:
una segunda línea (302b) de entrada de producto configurada para recibir un segundo suministro contiguo de galletas, estando la línea de entrada de producto configurada para guiar las galletas en movimiento continuo a lo largo de un segundo trayecto de desplazamiento; y
una segunda unidad (304b) de alimentador configurada para separar un grupo de productos del segundo suministro contiguo de productos en la segunda línea de entrada de producto y mover el grupo de galletas a la línea de envasado.
15. Conjunto de alimentador de galletas en línea según la reivindicación 14, en el que la unidad de alimentador y la segunda unidad (304b) de alimentador funcionan al unísono.
16. Conjunto de alimentador de galletas en línea según la reivindicación 15, en el que la unidad de alimentador está configurada para repetir la operación para separar de manera secuencial grupos de galletas del suministro contiguo de galletas en la línea de producto.
17. Conjunto de alimentador de galletas en línea según la reivindicación 16, en el que los grupos de galletas separados de manera secuencial incluyen un número predeterminado común de galletas.
Patentes similares o relacionadas:
Aparato y método para envasar bolsitas, del 3 de Junio de 2020, de Universal Pack S.r.l: Aparato para el envasado de bolsitas que comprende: - una unidad de envasado primaria configurada para suministrar dichas bolsitas […]
MÁQUINA PALETIZADORA DE ENVASES Y PROCEDIMIENTO DE UTILIZACIÓN DE LA MISMA, del 30 de Abril de 2020, de AND & OR RESEARCH, S.L.U: Máquina paletizadora de envases y su procedimiento de utilización para conseguir la máxima compactación de los envases en bateas. La máquina comprende un bastidor, en […]
Procedimiento y dispositivo para evitar envases vacíos, del 29 de Abril de 2020, de GEA Food Solutions Germany GmbH (100.0%): Procedimiento para evitar envases vacíos , en el que n ≥ 2 productos alimenticios se cortan al menos parcialmente al mismo tiempo, con un dispositivo de corte en lonchas […]
Dispositivo de relevo, del 13 de Noviembre de 2019, de TOYO JIDOKI CO., LTD.: Un dispositivo de relevo que comprenda: una primera sección de transporte que transporta una pluralidad de objetos a transportar, continuamente […]
Máquina de embalaje y procedimiento para la operación de una máquina de embalaje, del 16 de Abril de 2019, de SIG TECHNOLOGY AG: Máquina de embalaje con - por lo menos dos estaciones de embalaje dispuestas secuencialmente en orden consecutivo, en donde cada estación de embalaje presenta una cinta […]
Módulo de agrupación de marca circular con carro desmontable y procedimiento correspondiente, del 10 de Abril de 2019, de KHS GMBH: Módulo de agrupación de marcha circular que incluye: un marco de módulo , el cual define una trayectoria de marcha circular ; un […]
Dispositivo de paletización para un apilamiento de sacos llenos, del 30 de Mayo de 2018, de WINDMOLLER & HOLSCHER KG: Dispositivo de paletización para apilar capas a partir de al menos dos filas de sacos llenos conformando una pila de sacos , presentando un dispositivo […]
Procedimiento de paletización industrial de envases y unidad de paletización para llevarlo a cabo, del 27 de Febrero de 2018, de TALLER AUTOREMA, S.L.: Procedimiento de paletización industrial de envases y unidad de paletización para llevarlo a cabo, que comprende: una primera fase de distribución de […]