Sistema de campo abierto para cirugía magnética.
Un sistema (50) para la navegación de un dispositivo médico magnético que comprende una pluralidad de bobinas magnéticas (72,
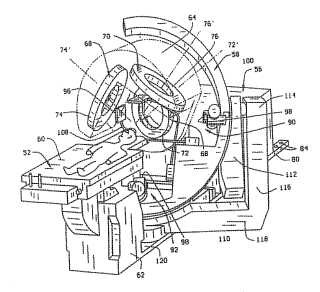
74, 76) a fin de aplicar un campo magnético en una dirección determinada para orientar el dispositivo médico magnético dentro de esa parte de un paciente situada dentro de una zona de operación del sistema en una dirección seleccionada, caracterizado por: una pluralidad de bobinas magnéticas (72, 74, 76) que son efectivas para orientar de forma controlable el dispositivo médico dentro sustancialmente de la totalidad de la zona de operación, estando dicha zona de operación colocada de forma que dicha parte del paciente puede ser localizada dentro de la zona de operación sin atravesar ninguna de dichas bobinas magnéticas.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US1999/025696.
Solicitante: STEREOTAXIS, INC.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 4041 FOREST PARK AVENUE ST. LOUIS, MO 63108 ESTADOS UNIDOS DE AMERICA.
Inventor/es: RITTER,Rogers C, GARIBALDI,Jeffrey M, WOLFERSBERGER,Charles, CREIGHTON,Francis M, WERP,Peter R, HOGG,Bevil J, BLUME,Walter M.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B1/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › Instrumentos para proceder al examen médico de las cavidades o conductos del cuerpo por inspección visual o fotográfica, p. ej. endoscopios (examen de las cavidades o conductos del cuerpo utilizando ondas ultrasónicas, sónicas o infrasónicas A61B 8/12; instrumentos endoscópicos para la toma de muestras celulares o para biopsias A61B 10/04; con fines quirúrgicos A61B 17/00; instrumentos quirúrgicos endoscópicos A61B 17/94; instrumentos quirúrgicos que utilizan un haz láser dirigido a lo largo o a través de un conducto flexible A61B 18/22 ); Dispositivos de iluminación al efecto (para los ojos A61B 3/00).
- A61B19/00
- A61B5/055 A61B […] › A61B 5/00 Medidas encaminadas a establecer un diagnóstico (diagnóstico por medio de radiaciones A61B 6/00; diagnóstico por ondas ultrasónicas, sónicas o infrasónicas A61B 8/00 ); Identificación de individuos. › por medio de la Resonancia Magnética Nuclear [RMN] o Electrónica [RME], p.ej. formación de imágenes por resonancia magnética.
- A61B6/00 A61B […] › Aparatos de diagnóstico por radiación, p. ej. combinados con el equipo de radioterapia (instrumentos para la medida de la intensidad de la radiación de aplicación en el campo de la medicina nuclear, p. ej. en vivo cómputo, G01T 1/161; aparatos para la toma de fotografías de rayos X G03B 42/02).
- A61B6/02 A61B […] › A61B 6/00 Aparatos de diagnóstico por radiación, p. ej. combinados con el equipo de radioterapia (instrumentos para la medida de la intensidad de la radiación de aplicación en el campo de la medicina nuclear, p. ej. en vivo cómputo, G01T 1/161; aparatos para la toma de fotografías de rayos X G03B 42/02). › Dispositivos para establecer un diagnóstico secuencial en diferentes planos; Diagnóstico estereoscópico utilizando radiaciones.
- A61B6/04 A61B 6/00 […] › Colocación de los pacientes; Camas inclinables o similares (mesas de operaciones A61G 13/00; sillas de operaciones A61G 15/00).
- A61B6/12 A61B 6/00 […] › Dispositivos para detectar o localizar cuerpos extraños (A61B 6/02 tiene prioridad).
- A61M19/00 A61 […] › A61M DISPOSITIVOS PARA INTRODUCIR AGENTES EN EL CUERPO O PARA DEPOSITARLOS SOBRE EL MISMO (introducción de remedios en o sobre el cuerpo de animales A61D 7/00; medios para la inserción de tampones A61F 13/26; dispositivos para la administración vía oral de alimentos o medicinas A61J; recipientes para la recogida, almacenamiento o administración de sangre o de fluidos médicos A61J 1/05 ); DISPOSITIVOS PARA HACER CIRCULAR LOS AGENTES POR EL CUERPO O PARA SU EXTRACCION (cirugía A61B; aspectos químicos de los artículos quirúrgicos A61L; magnetoterapia utilizando elementos magnéticos colocados dentro del cuerpo A61N 2/10 ); DISPOSITIVOS PARA INDUCIR UN ESTADO DE SUEÑO O LETARGIA O PARA PONERLE FIN. › Dispositivos para anestesia local; Dispositivos para hipotermia (A61M 5/42 tiene prioridad).
- A61M25/01 A61M […] › A61M 25/00 Catéteres; Sondas huecas (para medida o examen A61B). › Introducción, guía, avance, colocación o mantenimiento en posición de catéteres (A61M 25/10 tiene prioridad).
- A61N2/02 A61 […] › A61N ELECTROTERAPIA; MAGNETOTERAPIA; RADIOTERAPIA; TERAPIA POR ULTRASONIDOS (medida de corrientes bioeléctricas A61B; instrumentos quirúrgicos, dispositivos o métodos para transferir formas no mecánicas de energía hacia o desde el cuerpo A61B 18/00; aparatos de anestesia en general A61M; lámparas incandescentes H01K; radiadores de infrarrojos utilizados como calefactores H05B). › A61N 2/00 Magnetoterapia. › utilizando campos magnéticos producidos por bobinas, incluyendo bucles de espira única o electroimanes (A61N 2/12 tiene prioridad).
- G01N24/00 FISICA. › G01 METROLOGIA; ENSAYOS. › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › Investigación o análisis de materiales por utilización de la resonancia magnética nuclear, de la resonancia paramagnética electrónica o de otros efectos de spin.
- G01R33/3815 G01 […] › G01R MEDIDA DE VARIABLES ELECTRICAS; MEDIDA DE VARIABLES MAGNETICAS (indicación de la sintonización de circuitos resonantes H03J 3/12). › G01R 33/00 Dispositivos o aparatos para la medida de valores magnéticos. › con bobinas superconductoras, p. ej. alimentaciones a este efecto.
- G01R33/48 G01R 33/00 […] › Sistemas de visualización RMN.
PDF original: ES-2382883_T3.pdf
Fragmento de la descripción:
Sistema de campo abierto para cirugía magnética.
CAMPO DEL INVENTO Este invento se refiere a un sistema de cirugía magnética, y en particular a un sistema de cirugía magnética abierto que proporciona un mayor acceso al paciente para la formación de imágenes y otros fines.
ANTECEDENTES DEL INVENTO Se ha desarrollado una amplia variedad de procedimientos quirúrgicos mínimamente invasivos que utilizan catéteres, endoscopios, u otros dispositivos similares que puede ser dirigida su navegación a distancia desde sus extremos distales. El catéter, endoscopio u otro dispositivo médico es manipulado a través del tejido o a través una luz o cavidad existente en el cuerpo mediante el uso de un hilo de guía u otro medio mecánico. Ejemplos de tales procedimientos incluyen el tratamiento de aneurismas, malformaciones arteriales ventriculares, fibrilación auricular, piedras en la uretra, e investigaciones de lumen tales como sigmoidoscopias y colonoscopias, ERCPs; y exámenes del conducto biliar. Mientras que estos procedimientos son altamente beneficiosos para el paciente, son dificultosos y largos para el médico. Algunos procedimientos pueden solamente ser realizados por los cirujanos más expertos.
Se han realizado varios intentos para usar imanes a fin de ayudar en tales cirugías, como está documentado en "Un nuevo sistema de imanes para la navegación intravascular", Shyam B. Yodh y otros, Med. And Biol. Engrg., Vol 6, pp. 143-147 (1968) ; "Catéter intravascular controlado magnéticamente", John Alksne, Surger y , Vol. 61, nº 1, 339-345 (1968) ; "El ‘Pod', un nuevo dispositivo magnético para aplicaciones médicas", E. H. Frei y otros, en Proceedings of 16th Ann. Conference on Engineering in Medicine and Biology, Vol. 5, Nov. 18-20, 1963, pp. 156-157; "Propulsión magnética de diagnóstico o elementos terapéuticos a través de conductos corporales de pacientes animales o humanos", U.S. Pat. Nº 3.358.676, publicada el 19 de diciembre de 1967 de E. H. Frei y otros; "Angiografía selectiva con un catéter guiado por un imán" H. Tillander, IEEE Transactions on Magnetics, Vol. Mag-6, Nº 2, 355-375 (1970) ; y "Malformaciones arteriovenosas cerebrales tratadas con émbolos guiados magnéticamente", Jack Driller y otros, en Proc. of 25th Ann. Conf. On Engineering and Biology, Vol. 14 (1972) , p. 306.
Por diversas razones estos intentos previos en cirugía asistida magnéticamente no han tenido éxito ni han sido ampliamente usados. Una se ha debido a la incapacidad de los anteriores sistemas de guiar adecuadamente las sondas dentro de los vasos, en parte por motivos mecánicos e hidrodinámicos, en parte por la falta de una tecnología informática y de control, y también debido a una incapacidad de proporcionar una formación de imágenes adecuada en tiempo real de los procedimientos. Debido al pequeño tamaño de los vasos por los que hay que navegar son necesarios unos fluoroscopios móviles de una alta resolución y flexibilidad a fin de proporcionar una formación de imágenes adecuada. Estos fluoroscopios son instrumentos grandes. Incluso ahora, la accesibilidad de una formación de imágenes adecuada en la presencia de los grandes imanes necesarios para mover pequeñas "semillas" de guiado magnético en dispositivos médicos es difícil.
Se han descrito sistemas para el guiado magnético de catéteres y cables de guía para facilitar la navegación por curvas vasculares difíciles. Un ejemplo de tal sistema está proporcionado en la Solicitud Patente de utilidad de EEUU Serie Nº 09/020.934 (US-A-6.157.853) , presentada el 9 de febrero de 1998, titulada "Método y aparato que usa un campo perfilado de imán reposicionable para guiar el implante. Otros sistemas quirúrgicos magnéticos efectivos han requerido unos imanes relativamente grandes. A menudo, los imanes superconductores con sistemas de enfriamiento asociados se usan para generar los campos magnéticos más efectivos, y se han dispuesto dos imanes de un total de seis imanes para cada dirección espacial, teniendo cada uno un sistema de enfriamiento asociado. Tal sistema está descrito en la Solicitud de Patente de EEUU Serie Nº 08/920.446 (US-A-6.015.414) , presentada el 29 de 1997, titulado "Método y aparato para el control magnético de la dirección del movimiento de un catéter empujado mecánicamente".
Los medios de formación de imágenes pueden ser usados en conexión con una cirugía guiada magnéticamente. Un ejemplo de tal sistema se describe en la Solicitud de Patente de utilidad Serie Nº 09/020.798 (US-A-6.014.580) , presentada el 9 de febrero de 1998, titulada "Dispositivo y método para especificar un campo magnético para aplicaciones quirúrgicas". Mientras que la cirugía guiada magnéticamente con tales sistemas es práctica, el volumen y tamaño de sus sistemas magnéticos tiene como resultado una menor accesibilidad a la zona de operación del paciente que un cirujano desearía. También, el equipo de formación de imágenes (tal como un equipo de rayos X) para observar la zona de operación ha sido fijado al conjunto del sistema magnético, o también no móvil o de movilidad limitada con relación a los imanes y/o al paciente. Esta inmovilidad relativa tiende a reducir la capacidad de los cirujanos para ver el dispositivo operativo médico en el paciente, lo que hace la operación algo más difícil y algo más arriesgado para el paciente que lo que de otro modo podría ser. Otra dificultad en el uso de sistemas magnéticos para estos fines es que los fluoroscopios convencionales no pueden ser usados en campos magnéticos de cualquier magnitud significativa. Por lo tanto, sería deseable proporcionar un aparato para cirugía magnéticamente asistida que proporcionase una flexibilidad tanto de la formación de imágenes como en la aplicación del campo magnético.
Una dificultad asociada con el guiado magnético es que son necesarios unos campos magnéticos relativamente grandes para guiar los pequeños imanes que pueden ajustarse dentro de los pequeños vasos y lúmenes del cuerpo. Las grandes bobinas superconductoras empleadas en los sistemas anteriores para proporcionar estos campos magnéticos relativamente grandes se traducen en unas enormes cantidades de energía en los campos. Debido a la tendencia de las bobinas a enfriarse bruscamente si sube o baja demasiado rápidamente (la alimentación de potencia) , la velocidad a la que la corriente puede ser aplicada o retirada de las bobinas está limitada, incluso con métodos de aumento tales como el "aumento de potencia constante". Véase la Solicitud de Patente de de EEUU Serie Nº 08/921.298 (US-A-6.128.174) , presentada el 29 de agosto de 1997, titulada "Método y aparato para cambiar rápidamente un campo magnético producido por electroimanes". La distancia entre la bobina y la zona operativa es también un factor en el tiempo de aumento, y por lo tanto es deseable proporcionar un sistema que tenga bobinas situadas y dimensionadas para optimizar tanto la "apertura" descrita antes en cuanto a accesibilidad al cirujano de una zona de operación de un paciente, y la rapidez de los cambios de dirección del campo.
El trabajo de Gillies G. T. y otros "Instrumentación de la manipulación magnética para la investigación física médica", del 1 de marzo de 1994, Review of Scientific Instruments, AIP, Melville, NY, US, páginas 533-562, XP000435170 ISSN: 0034-6748, en el que está basada la parte precaracterizadora de la reivindicación 1, describe un sistema de manipulación magnético que utiliza pares de imanes opuestos para crear un campo magnético en un entorno cerrado.
El documento US-A-5.715.822 describe un sistema que usa unas bobinas magnéticas para hacer el seguimiento y obtención de imágenes de un dispositivo médico tal como un catéter.
El documento WO 97/00043 describe un sistema para localizar un dispositivo por la aplicación de un campo magnético a dicho dispositivo.
De acuerdo con el presente invento se ha proporcionado un sistema para la navegación de un dispositivo médico magnético que comprende una pluralidad de bobinas magnéticas para la aplicación de un campo magnético en una dirección particular con objeto de orientar un dispositivo médico magnético dentro de la parte del paciente situada dentro de una zona de operación del sistema en una dirección seleccionada, caracterizado porque: una pluralidad de bobinas magnéticas montadas dentro de al menos un soporte, siendo dichas bobinas magnéticas efectivas para orientar de forma controlable el dispositivo médico dentro de básicamente la totalidad de la zona de operación, estando dicha zona de operación situada de forma que dicha... [Seguir leyendo]
Reivindicaciones:
1. Un sistema (50) para la navegación de un dispositivo médico magnético que comprende una pluralidad de bobinas magnéticas (72, 74, 76) a fin de aplicar un campo magnético en una dirección determinada para orientar el dispositivo médico magnético dentro de esa parte de un paciente situada dentro de una zona de operación del sistema en una dirección seleccionada, caracterizado por: una pluralidad de bobinas magnéticas (72, 74, 76) que son efectivas para orientar de forma controlable el dispositivo médico dentro sustancialmente de la totalidad de la zona de operación, estando dicha zona de operación colocada de forma que dicha parte del paciente puede ser localizada dentro de la zona de operación sin atravesar ninguna de dichas bobinas magnéticas.
2. Un sistema para la navegación de un dispositivo médico magnético de acuerdo con la reivindicación 1, que además comprende al menos tres bobinas magnéticas (72, 74, 76) configuradas y dispuestas en una carcasa cóncava abierta para proporcionar un campo magnético efectivo dentro de la zona de operación a fin de orientar el dispositivo médico magnético en una dirección seleccionada dentro de la zona de operación.
3. Un sistema de acuerdo con la reivindicación 2, en el que las bobinas están dispuestas en una carcasa de forma generalmente semiesférica.
4. Un sistema de acuerdo con la reivindicación 3, en el que la carcasa de forma generalmente semiesférica tiene un diámetro interior mayor de sustancialmente 635 mm y un diámetro exterior menor de sustancialmente 1.270 mm.
5. Un sistema de acuerdo con las reivindicaciones 2, 3 ó 4, en el que la carcasa está montada para rotar alrededor de un eje vertical.
6. Un sistema de acuerdo con cualquiera de las reivindicaciones anteriores, en el que la pluralidad de bobinas magnéticas (72, 74, 76) están generalmente alineadas a lo largo de una pluralidad de ejes oblicuos, estando solamente una sola de dichas bobinas magnéticas (72, 74, 76) alineada a lo largo de uno de dichos ejes, y estando al menos una de dichas bobinas magnéticas (72, 74, 76) alineada a lo largo de dichos otros ejes.
7. Un sistema de acuerdo con cualquiera de las reivindicaciones anteriores que además comprende un soporte (52) del paciente para soportar un paciente, que tiene una parte destinada a ser colocada dentro de dicha zona de operación, siendo dicho soporte (52) del paciente móvil con respecto a dichos soportes de dichas bobinas magnéticas (72, 74, 76) , estando dicho soporte del paciente colocado con respecto a dichas bobinas magnéticas (72, 74, 76) , de forma que cuando dicho soporte del paciente es avanzado hacia dichas bobinas magnéticas (72, 74, 76) dicho paciente es movido al interior de dicha zona de operación antes de que dicho paciente atraviese el espacio interior de cualquiera de las bobinas magnéticas (72, 74, 76) .
8. Un sistema de acuerdo con cualquiera de las reivindicaciones 1 ó 6, que además comprende un soporte (52) del paciente para mover dicho paciente al interior de la zona de operación del sistema, teniendo solamente una de dichas bobinas magnéticas (72, 74, 76) su eje central generalmente alineado con la dirección de movimiento del soporte (52) del paciente, y estando las otras bobinas magnéticas (72, 74, 76) alineadas con una pluralidad de ejes oblicuos que se extienden a través de la zona de operación.
9. Un sistema de acuerdo con cualquiera de las anteriores reivindicaciones, en el que hay un total de tres bobinas magnéticas (72, 74, 76) configuradas y dispuestas para proporcionar un campo magnético efectivo dentro de la zona de operación con objeto de orientar el dispositivo médico magnético en una dirección seleccionada dentro de la zona de operación.
10. Un sistema de acuerdo con cualquiera de las anteriores reivindicaciones, en el que las bobinas magnéticas (72, 74, 76) tienen capacidad para proporcionar un campo magnético de al menos sustancialmente 0, 1 Tesla en cualquier lugar en una zona de operación de al menos 50, 8 mm por 50, 8 mm por sustancialmente 50, 8 mm.
11. Un sistema de acuerdo con la reivindicación 10, en el que las bobinas magnéticas (72, 74, 76) tienen una capacidad para proporcionar un campo magnético de al menos sustancialmente 0, 3 Tesla.
12. El sistema de acuerdo con cualquiera de las anteriores reivindicaciones, en el que la zona de operación tiene un volumen de al menos sustancialmente 127 mm por sustancialmente 127 mm por sustancialmente 127 mm.
13. El sistema de acuerdo con cualquiera de las anteriores reivindicaciones, en el que el centro de la zona de operación está a al menos 152, 4 mm de cada una de las bobinas magnéticas (72, 74, 76) .
14. Un sistema de acuerdo con la reivindicación 12, en el que el centro de la zona de operación está entre 304, 2 mm y 381 mm de cada una de las bobinas magnéticas (72, 74, 76) .
15. El sistema de acuerdo con cualquiera de las anteriores reivindicaciones, en el que las bobinas magnéticas (72, 74, 76) están dispuestas y configuradas de forma que sus ejes interseccionan, y en el que las bobinas (72, 74, 76)
están suficientemente separadas del punto de intersección para alojar una esfera centrada en el punto de intersección, con un radio de al menos 304, 8 mm.
16. Un sistema de acuerdo con cualquiera de las anteriores reivindicaciones que además comprende un sistema
(58) de formación de imágenes que comprende al menos una placa (96) de formación de imágenes y una fuente
(98) de formación de imágenes de rayos X, estando dicho sistema de formación de imágenes montado de forma móvil independientemente de las bobinas magnéticas (72, 74, 76) , de forma que la placa de formación de imágenes pueda ser movida a unas posiciones entre el paciente y las bobinas magnéticas (72, 74, 76) .
17. Un sistema de acuerdo con la reivindicación 12, en el que las placas (96) de formación de imágenes son unas placas (96) de formación de imágenes de silicio amorfo para proporcionar una protección al sistema de formación de imágenes ante los campos magnéticos fuertes.
18. Un sistema de acuerdo con la reivindicación 12 o la reivindicación 17, en el que cada placa (96) de formación de imágenes y su respectiva fuente (98) de rayos X está montada de forma fija una con respecto a la otra.
19. Un sistema de acuerdo con cualquiera de las reivindicaciones 16 a 18, en el que el sistema de formación de imágenes está montado sobre un soporte móvil alrededor de tres ejes generalmente perpendiculares.
20. Un sistema de acuerdo con la reivindicación 19, en el que los ejes de al menos tres bobinas (72, 74, 76) interseccionan, y en el que los tres ejes generalmente perpendiculares de movimiento del soporte se extienden a través del punto de intersección.
21. Un sistema de acuerdo con cualquiera de las reivindicaciones 1 a 15, que además comprende un dispositivo (58) de formación de imágenes, en el que el dispositivo médico de formación de imágenes comprende al menos una placa (96) de formación de imágenes que puede ser interpuesta entre una de las bobinas magnéticas (72, 74, 76) y la zona de operación.
22. Un sistema de acuerdo con cualquiera de las reivindicaciones anteriores que comprende un dispositivo médico de formación de imágenes que incluye al menos un detector de formación de imágenes de placa de silicio amorfo.
23. Un sistema de acuerdo con cualquiera de las reivindicaciones anteriores, en el que dicho sistema comprende solamente tres bobinas magnéticas (72, 74, 76) , y cada una de dichas bobinas magnéticas (72, 74, 76) comprende además una bobina magnética superconductora (72, 74, 76) , estando dichas bobinas (72, 74, 76) generalmente dispuestas a lo largo de los ejes de un sistema de coordenadas ortogonal.
24. Un sistema de acuerdo con la reivindicación 23, en el que el origen de tal sistema de coordenadas ortogonal está controlado para estar dentro de la zona de operación.
25. El sistema de acuerdo con cualquiera de las anteriores reivindicaciones 7 y 8, y las reivindicaciones que dependen de ellas que comprenden además un soporte (52) para el paciente, y un soporte móvil para la carcasa, de forma que dicha carcasa pueda ser reorientada alrededor de dicho soporte del paciente y también del paciente.
26. Un sistema de acuerdo con cualquiera de las anteriores reivindicaciones, en el que dichas bobinas magnéticas (72, 74, 76) están colocadas de forma que sus líneas de campo cercanas son sustancialmente rectas dentro de la zona de operación.
27. El sistema de acuerdo con cualquiera de las anteriores reivindicaciones, en el que las bobinas magnéticas (72, 74, 76) están configuradas para proporcionar un campo magnético regulable hasta al menos sustancialmente 0, 3 Tesla en cualquier sitio en la zona de operación.
28. Un sistema de acuerdo con cualquiera de las anteriores reivindicaciones, en el que las tres bobinas electromagnéticas (72, 74, 76) están configuradas y dispuestas para tener la capacidad de proporcionar un campo magnético de al menos aproximadamente 0, 1 Tesla dentro de una zona de operación de al menos sustancialmente 125 mm (5 pulgadas) por sustancialmente 125 mm (5 pulgadas) por sustancialmente 125 mm (5 pulgadas) , cuya zona de operación está separada al menos sustancialmente 300 mm (12 pulgadas) de cada una de las bobinas, para orientar selectivamente el dispositivo médico magnético en cualquier sitio dentro de la zona de operación.
29. Un sistema de acuerdo con la reivindicación 23, en el que las tres bobinas (72, 74, 76) están montadas en una carcasa que tiene una forma generalmente semiesférica.
30. Un sistema de acuerdo con la reivindicación 26, en el que las bobinas (72, 74, 76) están dispuestas de forma que sus ejes interseccionan en un punto, y en el que el eje vertical de rotación de la carcasa se extiende a través del punto de intersección de los ejes.
31. Un sistema de acuerdo con cualquiera de las reivindicaciones anteriores que comprende un dispositivo médico de formación de imágenes para proporcionar imágenes de la zona de operación en dos planos perpendiculares.
Patentes similares o relacionadas:
 Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Mejora de imagen endoscópica usando ecualización de histograma adaptativo limitado por contraste (CLAHE) implementada en un procesador, del 1 de Julio de 2020, de EndoChoice, Inc: Un procedimiento para mejorar imágenes obtenidas por al menos dos elementos de visualización en un sistema de endoscopio usando un algoritmo de ecualización […]
Unidad de control unible a un endoscopio que tiene un árbol que puede desviarse a través de dos mandos rotatorios para permitir la operación de los mandos con una man, del 24 de Junio de 2020, de Human XTensions Ltd: Una unidad de control unible a un endoscopio , teniendo el endoscopio dos mandos rotatorios externos y un árbol que puede desviarse a través de los dos […]
Endoscopio con expansor de pupila, del 24 de Junio de 2020, de Steris Instrument Management Services, Inc: Sistema óptico para un estéreo endoscopio que incluye un endoscopio monoscópico que tiene una pupila de entrada que está dividida en una mitad izquierda […]
Accionamiento de un dispositivo que comprende brazos mecánicos, del 17 de Junio de 2020, de Memic Innovative Surgery Ltd: Un mecanismo para accionar el movimiento de un eje que tiene dos grados de libertad, que comprende: un primer engranaje configurado […]
DISPOSITIVO DE EXTRACCIÓN DE RESIDUOS SÓLIDOS POR VIA RECTAL, del 12 de Mayo de 2020, de MARTÍNEZ GARZON, Miguel Angel: 1. Dispositivo de extracción de residuos sólidos por vía rectal caracterizado porque comprende al menos: un cabezal cilíndrico con un tubo central […]
Endoscopio ópticamente adaptativo, del 22 de Abril de 2020, de Steris Instrument Management Services, Inc: Sistema de obtención de imágenes para un endoscopio con un sistema óptico, comprendiendo el sistema de obtención de imágenes, un sistema de video endoscópico, […]
Dispositivo automático para inflado/desinflado aplicado en sistema endoscópico de exploración y obtención de imágenes mediante TCO, del 22 de Abril de 2020, de Micro-Tech (Nanjing) Co., Ltd: Un dispositivo automático para inflado/desinflado aplicado en un sistema endoscópico de exploración y obtención de imágenes mediante TCO, […]