MÉTODO DE AUTO-SINCRONIZACIÓN Y COMPENSACIÓN DE DESVIACIONES TEMPORALES EN LA RECEPCIÓN DE DATOS EMITIDOS PERIÓDICAMENTE Y DISPOSITIVO CONVERSOR A SEÑALES DE TIPO CODIFICADOR INCREMENTAL QUE LO IMPLEMENTA.
El dispositivo de la invención es un conversor de paquetes de datos digitales,
enviados por un equipo externo de medida, en señales de tipo codificador de posición incremental sinusoidal. La invención propone un nuevo dispositivo que supera las limitaciones detectadas en el estado de la técnica de los simuladores de codificadores de posición incremental con entrada por paquetes digitales, en dos aspectos fundamentales: 1) La conversión a salidas incrementales sinusoidales es correcta y sin discontinuidades incluso aunque la frecuencia de recepción de los paquetes de datos no sea totalmente constante, haciendo para ello uso de un procedimiento de compensación de los retardos detectados; y 2) la conversión se realiza apropiadamente, aunque no existan líneas de sincronismo con el equipo externo de medida, utilizando para ello un procedimiento de auto-sincronización con la cadencia de los paquetes de entrada.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201030136.
Solicitante: Asociación Industrial de Óptica, Color e Imagen - AIDO.
Nacionalidad solicitante: España.
Inventor/es: JIMENEZ RUIZ,ANTONIO RAMON, GUEVARA ROSAS,Jorge Israel, SECO GRANJA,Fernando Andrés, PRIETO HONORATO,José Carlos.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G06F1/025 FISICA. › G06 CALCULO; CONTEO. › G06F PROCESAMIENTO ELECTRICO DE DATOS DIGITALES (sistemas de computadores basados en modelos de cálculo específicos G06N). › G06F 1/00 Detalles no cubiertos en los grupos G06F 3/00 - G06F 13/00 y G06F 21/00 (arquitecturas de computadores con programas almacenados de propósito general G06F 15/76). › para las funciones con dos valores de amplitud, p. ej. funciones de Walsh.
Fragmento de la descripción:
Método de auto-sincronización y compensación de desviaciones temporales en la recepción de datos emitidos periódicamente y dispositivo conversor a señales de tipo codificador incremental que lo implementa.
Sector de la técnica
El sector de la técnica donde se encuadra la presente invención es el de la electrónica y las comunicaciones. Los sectores de aplicación son fundamentalmente la automática, la instrumentación, la robótica, el mecanizado de materiales y el control numérico por ordenador (CNC).
Estado de la técnica
Los sensores de desplazamiento, también denominados en algunos ámbitos como codificadores de posición, son dispositivos ampliamente utilizados en la industria para medir desplazamientos de translación o rotativos. Por otro lado, los actuadores son dispositivos capaces de generar el desplazamiento de un cuerpo utilizando energía eléctrica, líquidos o gases, siendo los actuadores más comunes los motores eléctricos, neumáticos y los hidráulicos. Los sensores de desplazamiento se emplean normalmente acoplados a alguno de estos actuadores en áreas como la automatización industrial, robótica, manipulación, máquinas-herramienta, sistemas de posicionamiento, impresoras, y en general en todas aquellas aplicaciones donde se requiera el movimiento controlado de un actuador. Existen diversos tipos de sensores para la captación de la información de desplazamiento, basados en principios capacitivos, resistivos, inductivos, magnéticos, piezoeléctricos, láser, por tiempo de vuelo ultrasónico, o por técnicas ópticas, entre otros [J.G. Webster, "The measurement, instrumentation and sensors handbook". CRC Press, Springer, IEEE Press. Capítulo 6, 1999. ISBN: 3-540-64830-5].
Los sensores o codificadores de posición pueden ser incrementales o absolutos en función, respectivamente, de si la información de posición que transmiten debe ser integrada a partir de una posición arbitraria que se define como cero, o, por el contrario la información contiene siempre el valor absoluto del desplazamiento. Dentro de la categoría particular de codificadores de posición ópticos, los codificadores incrementales rotativos son ampliamente utilizados acoplados a ejes de rotación de motores. Estos codificadores incrementales rotativos están compuestos por un disco acoplado a un eje rotatorio cuyo giro se quiere medir. El disco está fabricado de un material opaco y tiene un conjunto de ranuras equidistantes que al permitir el paso de la luz pueden ser detectadas por medio de un sistema óptico, el cual comúnmente está compuesto por un diodo emisor de luz o LED (Light Emitting Diode) y un fotorreceptor. Al girar el disco, en el fotorreceptor se obtiene una señal eléctrica en forma de pulsos, debida al paso de la luz entre las ranuras del disco. La señal eléctrica obtenida permite medir de forma directa el desplazamiento angular del disco; otros parámetros como la velocidad o aceleración angular se pueden deducir mediante diferenciación del desplazamiento angular respecto al tiempo. Para conocer el sentido de rotación del disco se utiliza un segundo fotorreceptor ubicado de forma tal que genere una señal desfasada 90º con respecto a la primera; por ello a este tipo de codificadores de posición incrementales se les conoce también como codificadores de posición en cuadratura.
Según sea el tipo de señal eléctrica de salida, los codificadores incrementales de posición pueden ser clasificados en dos clases: los de formas de onda cuadrada (conocidos como codificadores digitales), y los de forma de onda sinusoidal (también llamados codificadores sinusoidales). Aunque el principio de funcionamiento es el mismo, en muchas aplicaciones industriales se prefiere el uso de codificadores sinusoidales ya que permiten obtener una mayor precisión y resolución en las medidas de posicionamiento por medio de interpolación en la recepción [Jouve D., Bui D., "Influence of the motor feedback sensor on AC brushless servo drive performances", PCIM'2003 Conference Intelligent Motion, Nürnberg, pp. 410-416, Mayo 2003; Burke J., Moynihan, J., Unterkofler K,. "Extraction of high resolution position information from sinusoidal encoders", PCIM'2000 Conference Intelligent Motion, Nürnberg, pp. 217-222, 2000].
Además de las implementaciones clásicas de los codificadores de posición, existen dispositivos simuladores de codificador que, a pesar de no estar construidos mediante soluciones electro/magneto/óptico/mecánicas clásicas, en su salida se comportan como ellos y generan señales del mismo tipo que las de un codificador real. Por ejemplo, un simulador en cuadratura, que aparentemente podría ser una "caja negra" con una sola entrada y salida, permitiría transformar una señal analógica o digital, que representa información de desplazamiento y proviene de un equipo de medida externo, en señales en cuadratura del mismo tipo que las generadas por un codificador de posición real. Éstos simuladores, se suelen implementar utilizando soluciones mixtas hardware y software, sobre plataformas electrónicas y de cómputo que operan en tiempo real. Las aplicaciones especiales en las que son útiles este tipo de simuladores de codificador de posición son fundamentalmente de tres tipos, tal y como se describe a continuación:
Se pueden encontrar en el mercado algunos dispositivos electrónicos para simular codificadores de posición incrementales, por ejemplo tenemos el fabricado por la compañía Elettronica Scledense [Encoder System, "Encoder Simulator and Motion Simulator: Quadrature Reference for Lab, production and field" Codecx 2.0 User's Manual, http://www.encodersystem.com.]. Este equipo es capaz de transformar señales continuas analógicas que representan la velocidad de desplazamiento de un actuador en señales incrementales digitales o de onda cuadrada. Asumiendo que los datos en la entrada son continuos y representan fielmente el desplazamiento realizado por el actuador, el equipo conversor se puede utilizar en aplicaciones de tiempo real. También existe otra compañía que fabrica un simulador de codificador, se trata de Deva electronics [Deva electronics controls, "DEVA011 3 Axis PCI quadrature signal generator" Issue 2.0 user manual, http://www.deva.co.uk]. La salida de este dispositivo conversor, al igual que el dispositivo anterior, también es digital (es decir, de onda cuadrada, y no sinusoidal). Sin embargo, al estar preparado para conectarse al bus estándar...
Reivindicaciones:
1. Método de auto-sincronización y compensación de desviaciones temporales en la recepción de datos emitidos periódicamente con un periodo de emisión (T) dado, caracterizado por que comprende:
- calcular la frecuencia de la sinusoide (Fi) correspondiente a la información contenida en un paquete de datos (Pqi) recibido por un conversor en un instante de tiempo (ti) en la base de tiempos del conversor;
- esperar un tiempo de espera (tei) hasta que termine de generarse la sinusoide de frecuencia (F(i-1)) correspondiente al paquete de datos anterior (Pq(i-1));
- generar una señal sinusoidal con la frecuencia (Fi) de conversión, durante un intervalo temporal (di), de manera que entre señales sucesivas se mantenga la continuidad.
2. Método según la reivindicación 1, caracterizado por que el primer paquete de datos que se recibe toma como tiempo de espera (tei) la mitad del periodo de emisión (T).
3. Método según la reivindicación 1, caracterizado por que el tiempo de recepción de cada paquete ti se compara para comprobar que se encuentra dentro de una ventana temporal fijada por un valor T/n<ti<T-T/n, con n>2.
4. Método según la reivindicación 3, caracterizado por que cuando el tiempo de recepción de cada paquete ti se encuentra dentro de una ventana temporal fijada por un valor T/n<ti<T-T/n, con n>2, entonces el tiempo de espera (tei) tiene el valor de T-ti (tei=T-ti), y el intervalo temporal de generación sinusoidal (di) tiene el valor de T (di=T).
5. Método según la reivindicación 3, caracterizado por que se disminuye el tiempo de espera (tei) en una cantidad ΔT (tei=T-ti-ΔT), y el de generación sinusoidal en la misma cantidad (di=T-ΔT), para compensar la desviación sufrida cuando el tiempo de recepción de un paquete (ti) es anterior al mínimo establecido por la ventana temporal.
6. Método según la reivindicación 3, caracterizado por que se aumenta el tiempo de espera (tei) en una cantidad ΔT (tei=T-ti+ΔT), y el de generación sinusoidal en la misma cantidad (di=T+ΔT), para compensar la desviación sufrida cuando el tiempo de recepción de un paquete (ti) es posterior al máximo establecido por la ventana temporal.
7. Método según la reivindicación 5, caracterizado por que se modifica la frecuencia de la señal sinuosidad (Fi) correspondiente a la información contenida en un paquete de datos (Pqi) respecto al valor que le correspondería según el contenido del paquete de dicho datos (Pqi) por un factor multiplicativo igual a (m+1)/m cuando el tiempo de espera disminuye.
8. Método según la reivindicación 6, caracterizado por que se modifica la frecuencia de la señal sinuosidad (Fi) correspondiente a la información contenida en un paquete de datos (Pqi) respecto al valor que le correspondería según el contenido del paquete de dicho datos (Pqi) por un factor multiplicativo igual a (m-1)/m, cuando el tiempo de espera aumente.
9. Método según la reivindicación 5 ó 6, caracterizado por que el retraso y el adelanto, ΔT, respecto de los márgenes establecidos por la ventana temporal se fija como una fracción del periodo T de emisión de los paquetes de datos ΔT=T/m, siendo m un número mayor o igual a 2n/(n-2).
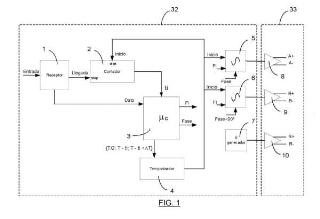
10. Codificador de posición incremental sinusoidal caracterizado por que comprende
11. Codificador de acuerdo con la reivindicación 10, caracterizado por que comprende además medios de adaptación (13) configurados para acomodar la señal generada a las especificaciones eléctricas sobre el voltaje del equipo.
12. Codificador de acuerdo con la reivindicación 11, caracterizado por que medios de adaptación comprenden:
- una pluralidad de amplificadores de salida incremental (9, 8, 10).
13. Codificador de acuerdo con una cualquiera de las reivindicaciones 10 a 12, caracterizado por que los medios de cálculo comprenden un microcontrolador (3).
Patentes similares o relacionadas:
PROCEDIMIENTO DE CONTROL DE UN ONDULADOR DE TENSIÓN POLIFÁSICO, del 21 de Octubre de 2011, de VALEO EQUIPEMENTS ELECTRIQUES MOTEUR: Procedimiento de mando de un puente de potencia destinado a controlar una carga eléctrica que incorpora varias fases, estando destinado […]
 RADIOMENSAJERIA NUMERICA Y POR TEXTO MEDIANTE MODEM INCORPORADO A UN PLC, del 10 de Noviembre de 2009, de SIEMENS ENERGY & AUTOMATION, INC.: Método que comprende: formatear un mensaje en un primer módem incorporado a un primer controlador lógico programable PLC ; donde el […]
RADIOMENSAJERIA NUMERICA Y POR TEXTO MEDIANTE MODEM INCORPORADO A UN PLC, del 10 de Noviembre de 2009, de SIEMENS ENERGY & AUTOMATION, INC.: Método que comprende: formatear un mensaje en un primer módem incorporado a un primer controlador lógico programable PLC ; donde el […]
METODO, SISTEMA Y APARATO, PARA UN CONTROLADOR LOGICO PROGRAMABLE., del 16 de Diciembre de 2006, de SIEMENS ENERGY & AUTOMATION, INC.: Un aparato de segmentación para su uso en un bloque de salida de impulsos , utilizable en un modo PWM o un en modo PTO, para proporcionar […]