Método de control para máquinas, que incluye un sistema, programa de ordenador, señales de datos e interfaz gráfica de usuario.
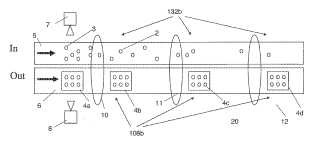
Un método para controlar una máquina (10, 11, 12) para coger un objeto (2) desde una primera posición (3) y colocar el objeto en una segunda posición (4a,
4b, 4c), donde un miembro sensor (7) proporciona datos sobre dicha primera posición (3) a un miembro de control (40), caracterizado por -enviar un mensaje (61) desde un proceso maestro del miembro de control (40) que comprende uno o más de dichas primeras posiciones a todas las máquinas (10, 11, 12) controladas por dicho miembro de control, -enviar un mensaje (62) desde dicho miembro de control a todas las máquinas (10, 11, 12) con un miembro indicados que especifica cual de una o más de dichas primeras posiciones (3) deben utilizarse, -recibir un mensaje (65) desde dicha máquina (10, 11, 12) con un estado que indica que dicha primera posición (3)
ha sido utilizada, -enviar un mensaje que comprende dicha primera posición (3), o más de dichas primeras posiciones a todas las máquinas (10, 11, 12) controladas por el miembro de control (40), en cuyo mensaje cada una de dichas primeras posiciones está marcada con un estado de usado o no.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2004/001009.
Solicitante: ABB AB.
Nacionalidad solicitante: Suecia.
Dirección: KOPPARBERGSVÄGEN 2 721 83 VÄSTERÀS SUECIA.
Inventor/es: KNOBEL,Henrik , ERLANDSSON-WARVELIN,Mats.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J9/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores de control programado.
- B25J9/16 B25J […] › B25J 9/00 Manipuladores de control programado. › Controles por programa (control total de una fábrica, es decir, control centralizado de varias máquinas, G05B 19/418).
- B65G47/34 B […] › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › Dispositivos para descargar los objetos o materiales de transportadores (B65G 47/256 tiene prioridad).
- B65G47/48 B65G 47/00 […] › según marcas de destino llevadas bien por los objetos, bien por los portacargas.
- G05B19/18 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 19/00 Sistemas de control por programa (aplicaciones específicas, ver los lugares apropiados, p. ej. A47L 15/46; relojes que implican medios anejos o incorporados que permiten hacer funcionar un dispositivo cualquiera en un momento elegido de antemano o después de un intervalo de tiempo predeterminado G04C 23/00; marcado o lectura de soportes de registro con una información digital G06K; registro de información G11; interruptores horarios o de programa horario que se paran automáticamente cuando el programa se ha realizado H01H 43/00). › Control numérico (NC), es decir, máquinas que funcionan automáticamente, en particular máquinas herramientas, p. ej. en un entorno de fabricación industrial, para efectuar un posicionamiento, un movimiento o acciones coordinadas por medio de datos de un programa en forma numérica (G05B 19/418 tiene prioridad).
- G05B19/418 G05B 19/00 […] › Control total de una fábrica, es decir, control centralizado de varias máquinas, p. ej. control numérico directo o distribuido (DNC), sistemas de fabricación flexibles (FMS), sistemas de fabricación integrados (IMS), fabricación integrada por computador (CIM).
PDF original: ES-2377402_T3.pdf
Fragmento de la descripción:
Método de control para máquinas, que incluye un sistema, programa de ordenador, señales de datos e interfaz gráfica de usuario Campo técnico La invención se refiere a un método y un sistema para controlar una máquina industrial para realizar operaciones para mover objetos desde un lugar a otro o para empaquetarlos en envases. En particular, el sistema se refiere a máquinas de recogida y colocación que incluyen robots o procesadores industriales.
Técnica anterior La invención se refiere a un sistema para extraer un objeto entre una pluralidad de objetos. Los objetos pueden ser estáticos o pueden estar en un flujo de producción continuo. Por objetos en este contexto debería entenderse tanto objetos que son idénticos como también objetos o grupos de objetos que son diferentes en la forma, color, suavidad, etc. Los objetos están colocados o pueden llegar a la esfera de trabajo de un robot en capas de una plataforma de carga, sobre una placa giratoria o similar, o entrar como una corriente continua sobre un transportador. Una tarea común realizada por una máquina de un sistema de este tipo es una tarea que se llama comúnmente recogida y colocación. Las tareas de recogida y colocación incluyen coger objetos desde una cinta transportadora y colocarlos sobre una plataforma de carga o coger objetos y colocarlos en una caja de cartón de envío. Un ejemplo bien conocido es la recogida de chocolate desde una cinta transportadora y su colocación en una bandeja de envase o una caja de chocolate.
El documento EP 0 667 124 presenta un sistema de control para un dispositivo de alimentación de agujas para transferir de forma automática agujas posicionadas de forma aleatoria sobre un transportador de indexación hasta un dispositivo de acoplamiento para el transporte siguiente hasta un lugar de procesamiento. El dispositivo de alimentación de agujas comprende uno o más robots, cada uno de los cuales tiene un medio de agarre para coger y colocar las agujas en el dispositivo de acoplamiento.
El documento US 5.041.907 presenta un aparato y un método para coger y procesar objetos que están orientados de forma aleatoria y están posicionados de forma aleatoria que se mueven sobre una cinta de objetos y para transferirlos a destinos que están orientados de forma aleatoria y están posicionados de forma aleatoria que se mueven sobre una cinta de destino. Una unidad de procesamiento de imágenes que utiliza un sistema de visión identifica y localiza objetos y destinos en ventanas de visión de solape sucesivas hasta un número óptimo predeterminado de objetos. Las localizaciones de estos objetos y los destinos son introducidos en una cola de entrada que es transmitida hasta las colas de localización de objetos y destinos de un primer controlador del movimiento del robot. El primer robot coge y deposita en destinos todos los objetos que pueden en el tiempo disponible mientras pasan los objetos y destinos, e introduce las localizaciones de los objetos no cogidos y los destinos en los que no está colocado ningún objeto en una cola de salida que es transmitida a las colas de los objetos y de las localizaciones de los destinos de un segundo controlador de movimiento del robot.
El documento US 6 401 936, titulado “Divert apparatus for conveyor system” describe un aparato de desviación paraun sistema de transporte. Éste es un sistema de clasificación para procesar una corriente desordenada de objetos que incluye artículos no planos tri-dimensionales. El aparato regula el flujo de artículos a través del sistema produciendo una corriente de artículos individuales espaciados unos de los otros a partir de una corriente desordenada en un llamado proceso de individualización. También existen medios para incrementar mecánicamente el espaciamiento entre los objetos y una puerta para descargar artículos desde la corriente. El sistema conocido está diseñado solamente para un tipo de artículos. Sin embargo, cuando se cambia el tipo de objeto o de distribución de tipos de objetos incluidos en la producción, el aparato debe reajustarse mecánicamente.
Sumario de la invención La presente invención resuelve uno o más de los problemas anteriores. En un primer aspecto de la invención, se proporciona un método para controlar una máquina para coger un objeto desde una primera posición y para colocar el objeto en una segunda posición, en el que un miembro sensor proporciona datos sobre dicha primera posición a un miembro de control dispuesto para: emitir un mensaje desde un proceso maestro del miembro de control que comprende una o más de dichas posiciones hasta todas dichas máquinas controladas por dicho miembro de control; emitir un mensaje desde dicho miembro de co0ntrol hasta todas dichas máquinas con un miembro indicador que especifica cuál de una o más de dichas primeras posiciones deben ser procesadas; recibir un mensaje desde una de dichas máquinas con un estado en el que la primera posición ha sido utilizada; y emitir un mensaje que comprende dicha primera posición (3) , o más de dichas primeras posiciones, a todas las máquinas (10, 11, 12) controladas por el miembro de control (40) , en cuyo mensaje cada una de dichas primeras posiciones está marcada con un estado de usado o no.
En otro aspecto de la invención, se proporciona un sistema con un miembro de control maestro y con un miembro de
control para accionar un grupo de máquinas para realizar los métodos de la invención y para mover de forma adaptable objetos desde una primera posición hasta una segunda posición. La invención describe una función nueva del proceso, que se utiliza para compartir dinámicamente pociones de los objetos entre una pluralidad de máquinas, con preferencia, pero no exclusivamente robots, procesadores o máquinas de coger y colocar, con el fin de completar la tarea. Las posiciones pueden ser de objetos individuales, objetos organizados en patrones o posiciones libres de objetos, es decir, posiciones en las que los objetos deberían estar colocados. Los objetos pueden ser iguales, similares o diferentes. Las posiciones pueden estar colocadas sobre transportadores o cualquier otro bastidor de objeto – fijo o móvil.
En otra forma de realización, la invención describe una nueva solución para la distribución eficiente de tales posiciones entre una pluralidad de robots. En otra forma de realización ventajosa, la compensación de la carga se realiza se realiza entre los robots que procesan las posiciones.
En otro aspecto de la invención, se describe un programa de ordenador para realizar el método de acuerdo con la invención. En otro aspecto de la invención, se describe un programa de ordenador para realizar el método de la invención.
Todavía en otro aspecto de la invención se describe una señal de datos de ordenador en una onda portadora de acuerdo con la invención.
Todavía en otro aspecto de la invención, se describe una interfaz de usuario gráfica de acuerdo con la invención.
La ventaja principal de la invención es que los objetos son tratados de una manera eficiente por un grupo de máquinas o robots. El proceso es adaptable y asegura que uno y solamente uno de los robots procese una posición. El orden en el que las posiciones son procesadas es independiente del robot o máquina individual que procese la posición. Las posiciones pueden estar colocadas sobre transportadores o cualquier otro bastidor de objeto – fijo o móvil.
Otra ventaja de los métodos descritos en la invención es que son robustos en términos de paradas de las máquinas individuales en una instalación, puesto que todas las máquinas reciben siempre todas las posiciones y solamente las posiciones con éxito son informadas desde las máquinas activas. Una máquina o robot que no está ya funcionando o está desconectado, etc. no puede informar de una operación con éxito.
Otra ventaja es que se puede realizar también, si es necesario, la compensación de la carga, que se puede utilizar para distribuir las tareas de una manera uniforme entre máquinas en un grupo de producción o grupo de trabajo. Esto tiene la ventaja de distribuir el desgaste en las máquinas de una manera uniforme y de proporcionar un grado de redundancia compensando los niveles de carga por debajo de las capacidades máximas de las máquinas. Esto proporciona también un método sencillo y económico para compensar las cargas para operaciones siguientes.
Los métodos y sistemas de la invención son especialmente ventajosos con respecto al procesado flexible. Esto es debido a que los cambios en tipo y extensión de la producción... [Seguir leyendo]
Reivindicaciones:
1. Un método para controlar una máquina (10, 11, 12) para coger un objeto (2) desde una primera posición (3) y colocar el objeto en una segunda posición (4a, 4b, 4c) , donde un miembro sensor (7) proporciona datos sobre dicha primera posición (3) a un miembro de control (40) , caracterizado por -enviar un mensaje (61) desde un proceso maestro del miembro de control (40) que comprende uno o más de dichas primeras posiciones a todas las máquinas (10, 11, 12) controladas por dicho miembro de control, -enviar un mensaje (62) desde dicho miembro de control a todas las máquinas (10, 11, 12) con un miembro indicados que especifica cual de una o más de dichas primeras posiciones (3) deben utilizarse, -recibir un mensaje (65) desde dicha máquina (10, 11, 12) con un estado que indica que dicha primera posición (3)
ha sido utilizada, -enviar un mensaje que comprende dicha primera posición (3) , o más de dichas primeras posiciones a todas las máquinas (10, 11, 12) controladas por el miembro de control (40) , en cuyo mensaje cada una de dichas primeras posiciones está marcada con un estado de usado o no.
2. Un método de acuerdo con la reivindicación 1, caracterizado por -recibir en dicha máquina (10, 11, 12) el mensaje que comprende una o más de dichas primeras posiciones, -procesar una de una o más de dichas primeras posiciones, -enviar un mensaje al miembro de control (40) que comprende la información de que dicha primera posición ha sido usada.
3. Un método de acuerdo con la reivindicación 1, caracterizado por -actualizar en dicho miembro de control (40) el marcador de dicha primera posición como utilizada y -enviar desde el miembro de control (40) a todas las máquinas (10, 11, 12) un mensaje de que el estado de dicha primera posición consumida es igual a utilizada.
4. Un método de acuerdo con la reivindicación 1, caracterizado por un miembro de control (40) que selecciona (73, 85) una o más de dichas primeras posiciones específicas que deben ser procesadas por una máquina (10, 11, 12) específica.
5. Un método de acuerdo con la reivindicación 1, caracterizado porque el miembro de control (40) utiliza un algoritmo para seccionar dicha primera posición a procesar por una máquina específica de todas las máquinas (10, 11, 12) .
6. Un método de acuerdo con la reivindicación 4, caracterizado porque el miembro de control (40) lleva a cabo una activación repetida de una primera posición.
7. Un método de acuerdo con la reivindicación 1, caracterizado por -registrar dicha primera posición (3) del objeto junto con un miembro de identidad único, -marcar cada primera posición con un estado de usada o no usada.
8. Un método de acuerdo con la reivindicación 7, caracterizado porque el miembro de identidad único toma la forma de un número.
9. Un método de acuerdo con la reivindicación 8, caracterizado porque el miembro de identidad único toma la forma de una serie alfanumérica.
10. Un método de acuerdo con la reivindicación 1, caracterizado por asignar dicha primera posición a una máquina específica en función de la compensación de la carga para una pluralidad de máquinas (10, 11, 12) controladas por el miembro de control (40) .
11. Un método de acuerdo con la reivindicación 10, caracterizado por asignar dicha primera posición a una máquina específica en función de la compensación de la carga de todas las máquinas controladas por el miembro de control (40) .
12. Un método de acuerdo con la reivindicación 1, caracterizado por asignar dicha primera posición a una máquina específica en función de una parada que se ha producido en un grupo de trabajo controlado por el miembro de
control (40) .
13. Un método de acuerdo con la reivindicación 1, caracterizado por asignar dicha primera posición a una máquina específica en función de la retirada del servicio de otra máquina específica en un grupo de trabajo controlado por el miembro de control (40) .
14. Un sistema para controlar una máquina para coger un objeto desde una primera posición y colocar el objeto en una segunda posición, que comprende un miembro sensor (7, 8) , una pluralidad de miembros de las máquinas (10, 11, 12) para tomar un objeto (2) desde una primera posición (3) y colocarlo en una segunda posición (4a, 4b, 4c) , y un miembro de control (40) para controlar dicha pluralidad de máquinas (10, 11, 12) , caracterizado porque el miembro de control (40) está conectado al menos a un miembro de control de la máquina (41a, 41b, 41c) para una de dicha pluralidad de máquinas (10, 11, 12) , cuyo miembro de control (40) comprende una lista de todas dichas primeras posiciones, cada uno del al menos un miembro de control de las máquinas (41a, 41b, 41c) , que está conectado con el miembro de control, comprende elementos de programa de ordenador para cambiar el estado de dicha primera posición en su lista de todas dichas primeras posiciones, el al menos un miembro de control de las máquinas (41a, 41b, 41c) comprende elementos de programa de ordenador para actualizar el estado de dicha primera posición en su lista de todas las primeras posiciones a la recepción de un mensaje desde el miembro de control (40) , y el al menos un miembro de control de las máquinas (41a, 41b, 41c) comprende elementos de programa de ordenador para enviar un mensaje al miembro de control (40) cuando dicha primera posición ha sido procesada.
15. Un sistema de acuerdo con la reivindicación 14, caracterizado porque el miembro de control (40) comprende elementos de programa de ordenador para cambiar el estado de dicha primera posición en la lista de todas las primeras posiciones.
16. Un sistema de acuerdo con la reivindicación 14, caracterizado porque cada primera posición de todas las primeras posiciones en la lista es registrada junto con un miembro identificador único.
17. Un sistema de acuerdo con la reivindicación 16, caracterizado porque comprende un miembro de sincronización que proporciona una señal adecuada para una cualquiera de las máquinas (10, 11, 12) sobre la cual se basa una acción de activación.
18. Un sistema de acuerdo con la reivindicación 14, caracterizado porque al menos un miembro sensor (7, 8) comprende un detector no-óptico.
19. Un sistema de acuerdo con la reivindicación 14, caracterizado porque al menos un miembro sensor (7, 8) comprende un miembro de detección de visión u óptico.
20. Un sistema de acuerdo con la reivindicación 19, caracterizado porque al menos un miembro sensor (7, 8) comprende una fotocélula.
21. Un sistema de acuerdo con la reivindicación 19, caracterizado porque al menos un miembro sensor (7, 8) comprende una cámara y un miembro de procesamiento de imágenes.
22. Un sistema de acuerdo con la reivindicación 21, caracterizado porque el miembro de procesamiento de imágenes comprende elementos de programa de ordenador dispuestos para reconocimiento de imágenes.
23. Un programa de ordenador que comprende medios de código de ordenador y/o porciones de código de software para hacer que un ordenador o procesador ejecuten cualquiera de las etapas de las reivindicaciones 1 a 13.
24. Un producto de programa de ordenador de acuerdo con la reivindicación 23 comprendido en uno o más medios legibles por máquina.
25. Una interfaz gráfica de usuario para controlar una máquina (10, 11, 12) para tomar un objeto (2) desde una primera posición (3) y colocar el objeto en una segunda posición (4a, 4b, 4c) por medio de un método de acuerdo con una cualquiera de las reivindicaciones 1 a 14.
26. Una interfaz gráfica de usuario de acuerdo con la reivindicación 25, caracterizada porque el GUI comprende miembros de representación de objetos de software (108, 109, 110, 111) para configurar cualquiera de una pluralidad de máquinas (10, 11, 12) como cualquiera de la lista de:
- un grupo de trabajo (108) para mover de forma adaptable objetos (3) por las máquinas (10, 11, 12) ;
- una distribución (118, 119) de máquinas (10, 11, 12) dispuestas de acuerdo con la identidad del objeto procesado;
- un orden en el que los objetos deben llegar a las máquinas (10, 11, 12) expresados como zonas de trabajo (110, 111) ;
- un grupo de compensación de la carga (132, 133, 134) en el que las cargas con compensadas entre cualquiera de las máquinas (10, 11, 12) .
27. Una interfaz gráfica de usuario de acuerdo con la reivindicación 26, caracterizada porque las configuraciones están dispuestas de tal manera que son representadas y/o editadas después de la activación de una parte de la representación gráfica de una o más zonas de producción que comprenden una o más máquinas (10, 11, 12) por medio de un ratón de ordenador, un teclado, un conjunto de teclas, una pantalla táctil, un lápiz o cualquier otro medio de selección de pantalla de ordenador similar.
28. Una interfaz gráfica de usuario de acuerdo con una cualquiera de las reivindicaciones 25 a 27, caracterizada porque una o más máquinas (10, 11, 12) pueden estar configuradas para tomar un objeto desde una primera posición y colocar el objeto en una segunda posición realizando una operación de arrastre y colocación en un miembro de representación de objeto de software (110, 111) .
Patentes similares o relacionadas:
Controlador de sistema transportador, sistema transportador y método de sincronización de datos, del 1 de Julio de 2020, de EWAB Engineering AB: Un controlador de sistema transportador , que comprende: una unidad de almacenamiento de datos configurada para almacenar una […]
Sistema de trabajo estéril, del 1 de Julio de 2020, de Shibuya Corporation: Un sistema de trabajo estéril para permitir que un trabajador realice un trabajo estéril requerido para cultivo dentro de una cámara estéril del sistema que tiene […]
Procedimiento y disposición para el control remoto de dispositivos de campo de al menos un sistema de automatización, del 17 de Junio de 2020, de SCHNEIDER ELECTRIC INDUSTRIES SAS: Procedimiento para el control remoto de al menos un dispositivo de campo (D1... Dn) en al menos un sistema de automatización (P1... Pk) con una unidad de control (BG); […]
Dispositivo y método para la transmisión de datos, del 10 de Junio de 2020, de DR. JOHANNES HEIDENHAIN GMBH: Dispositivo para la transmisión de datos con una interfaz de aparato de medición , una interfaz de control y una interfaz adicional […]
Procedimiento para hacer funcionar una planta de producción y planta de producción, del 3 de Junio de 2020, de SEW-EURODRIVE GMBH & CO. KG: Procedimiento para hacer funcionar una planta de producción son que la planta de producción tiene un sistema de control de nivel superior, estaciones de trabajo […]
Sistema y método de control en bucle cerrado de firma de objetivo, del 6 de Mayo de 2020, de EMHART GLASS S.A.: Un sistema para ajustar automáticamente la regulación temporal de sucesos de operaciones en cavidades de una sección de una máquina de secciones individuales, […]
Sistema transportador multizona con control basado en LAN, del 6 de Mayo de 2020, de MILWAUKEE ELECTRONICS CORPORATION: Un sistema de control de transportador para controlar un sistema transportador , configurado para transportar una serie de cargas, y […]
Métodos y aparatos para el control de calidad guiado de un sistema de envasado, del 6 de Mayo de 2020, de TETRA LAVAL HOLDINGS & FINANCE S.A.: Método para el control de calidad de un sistema de envasado, comprendiendo dicho método: recibir un registro de datos de identificación de envasado, estando relacionado […]