Método y aparato para determinar la posición de un instrumento quirúrgico con respecto a un volumen objetivo dentro de un cuerpo animal.
Método para determinar la posición de un instrumento quirúrgico (28n) con respecto a un volumen objetivo dentro de un cuerpo animal según un preplan de braquiterapia indicando al menos una locación/profundidad del instrumento quirúrgico (28n'),
comprendiendo el método los pasos de:
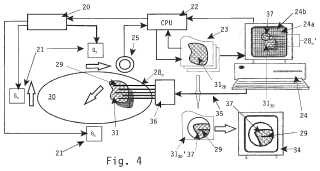
i) obtener una pluralidad de imágenes bidimensionales (312D) de dicho volumen objetivo utilizando medios de formación de imagen (20, 21n), estando dichas imágenes bidimensionales espaciadas entre sí en una dirección longitudinal, y estando representada cada imagen 2D por un corte de datos de imagen I (x,y,z);
ii) reconstruir a partir de dicha pluralidad de cortes de datos de imagen I (x,y,z) una imagen tridimensional (313D) de dicho volumen objetivo utilizando medios de transformación (23), dicha imagen en 3D representada por un conjunto volumétrico de datos de imagen V (x,y,z);
iii) mostrar dicha imagen tridimensional (313D) de dicho volumen objetivo a un usuario utilizando medios de exposición, comprendiendo el método además los pasos de:
iv) generar el preplan comprendiendo un instrumento quirúrgico imaginario (28n') utilizando la imagen tridimensional (313D), seleccionar según dicho preplan al menos una locación objetivo imaginaria específica (37) que comprende dicho instrumento quirúrgico imaginario (28n') dentro de dicha imagen tridimensional que se muestra mediante dicho medio de exposición utilizando medios de selección;
v) controlar automáticamente dichos medios de formación de imagen (20, 21n) con respecto a dicho volumen objetivo para obtener en tiempo real una única imagen bidimensional (312D') representada por el corte de datos de imagen I (x,y,z) de una locación objetivo específica dentro de dicho volumen objetivo correspondiendo a dicha locación objetivo imaginaria específica (37) seleccionada dentro de dicha imagen tridimensional (313D);
vi) mostrar dicha imagen bidimensional en tiempo real (312D') de dicha locación objetivo específica al usuario utilizando medios de exposición; y
vii) determinar la posición actual de dicho instrumento quirúrgico (28n) dentro de dicha locación objetivo específica utilizando dicha imagen bidimensional en tiempo real (312D') de dicha locación objetivo específica mostrada.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E03078243.
Solicitante: NUCLETRON B.V..
Nacionalidad solicitante: Países Bajos.
Dirección: WAARDGELDER 1 3905 TH VEENENDAAL PAISES BAJOS.
Inventor/es: KINDLEIN, JOHANN, VAN DER LUGT, WILCO, SCHUURMAN, JEROEN, HENNING,JOHAN, Kwa,Stefan.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B17/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › Instrumentos, dispositivos o procedimientos quirúrgicos, p. ej. torniquetes (A61B 18/00 tiene prioridad; dispositivos anticonceptivos, pesarios, dispositivos para su introducción A61F 6/00; cirugía ocular A61F 9/007; cirugía otorrina A61F 11/00).
- A61B19/00
- A61B5/055 A61B […] › A61B 5/00 Medidas encaminadas a establecer un diagnóstico (diagnóstico por medio de radiaciones A61B 6/00; diagnóstico por ondas ultrasónicas, sónicas o infrasónicas A61B 8/00 ); Identificación de individuos. › por medio de la Resonancia Magnética Nuclear [RMN] o Electrónica [RME], p.ej. formación de imágenes por resonancia magnética.
- A61B5/06 A61B 5/00 […] › Dispositivos para detectar o localizar cuerpos extraños por procedimientos diferentes al uso de radiaciones (para su extracción A61B 17/50).
- A61B6/06 A61B […] › A61B 6/00 Aparatos de diagnóstico por radiación, p. ej. combinados con el equipo de radioterapia (instrumentos para la medida de la intensidad de la radiación de aplicación en el campo de la medicina nuclear, p. ej. en vivo cómputo, G01T 1/161; aparatos para la toma de fotografías de rayos X G03B 42/02). › Diafragmas.
- A61B8/12 A61B […] › A61B 8/00 Diagnóstico utilizando ondas ultrasónicas, sónicas o infrasónicas. › en cavidades o conductos del cuerpo, p. ej. utilizando catéteres (catéteres en sí A61M 25/00).
- A61N5/10 A61 […] › A61N ELECTROTERAPIA; MAGNETOTERAPIA; RADIOTERAPIA; TERAPIA POR ULTRASONIDOS (medida de corrientes bioeléctricas A61B; instrumentos quirúrgicos, dispositivos o métodos para transferir formas no mecánicas de energía hacia o desde el cuerpo A61B 18/00; aparatos de anestesia en general A61M; lámparas incandescentes H01K; radiadores de infrarrojos utilizados como calefactores H05B). › A61N 5/00 Radioterapia (dispositivos o aparatos aplicables a la vez a la terapia y al diagnóstico A61B 6/00; aplicación de material radiactivo al cuerpo A61M 36/00). › Radioterapia; Tratamiento con rayos gamma; Tratamiento por irradiación de partículas (A61N 5/01 tiene prioridad).
- G01R33/28 FISICA. › G01 METROLOGIA; ENSAYOS. › G01R MEDIDA DE VARIABLES ELECTRICAS; MEDIDA DE VARIABLES MAGNETICAS (indicación de la sintonización de circuitos resonantes H03J 3/12). › G01R 33/00 Dispositivos o aparatos para la medida de valores magnéticos. › Detalles de los aparatos previstos en los grupos G01R 33/44 - G01R 33/64.
- G06T11/00 G […] › G06 CALCULO; CONTEO. › G06T TRATAMIENTO O GENERACIÓN DE DATOS DE IMAGEN, EN GENERAL. › Generación de imagen 2D (Bidimiensional).
PDF original: ES-2385085_T3.pdf
Fragmento de la descripción:
Método y aparato para determinar la posición de uninstrumento quirúrgico con respecto a un volumen objetivo dentro de un cuerpo animal [0001] La presente invención se refiere a un método para determinar la posición de un instrumento quirúrgico con respecto a un volumen objetivo dentro de un cuerpo animal según un preplan de braquiterapia.
En el campo médico, el uso de técnicas de imagen es común para ver los órganos internos de un sujeto. Por ejemplo, en el diagnóstico del cáncer de próstata, un técnico en diagnóstico utiliza ultrasonido transrectal (TRUS) para identificar si las lesiones están presentes así como para determinar la ubicación, tamaño y extensión de las lesiones, de estar presentes. El equipamiento convencional de diagnóstico mediante imagen basado en el principio del ultrasonido típicamente comprende una sonda de ultrasonido para trasmitir las señales de las ondas de ultrasonido al sujeto y recibir las señales reflejadas de las ondas de ultrasonido de éste. Las señales de las ondas de ultrasonido reflejadas recibidas por la sonda de ultrasonido se procesan formando una imagen bidimensional del volumen objetivo bajo examen.
Una realización típica de una sonda de ultrasonido es una sonda intracavidad de ultrasonido empleada fundamentalmente en los campos de ginecología y obstetricia con el propósito de examinar órganos intrapélvicos, tales como la vagina, el útero y los ovarios en mujeres.
Otra aplicación en la cual se utilizan sondas ultrasonido intracavidad se relacionan con el tratamiento de cáncer de próstata mediante la implantación de semillas radioactivas a través de una aguja hueca, cuya aguja se inserta dentro del cuerpo cerca de o en la glándula de la próstata. Un ejemplo de un dispositivo para efectuar terapia de radiación en un cuerpo animal mediante la implantación de semillas radioactivas a través de un número de agujas insertadas en el cuerpo animal se expone por ejemplo en la Patente Europea, Solicitud No. EP-A1-1 070 519. Antes de la implantación de las semillas radioactivas, en ese dispositivo se insertan una o más agujas en el cuerpo animal, en donde la locación exacta de (la punta de) la aguja se monitorea utilizando imágenes obtenidas con una sonda intracavidad de ultrasonido, cuya sonda se inserta dentro del recto del paciente. La inserción de las agujas hacia su profundidad (locación) deseada preplanificada se controla utilizando la información obtenida de dichas imágenes. Otra técnica de formación de imagen se basa en el principio de imagen mediante resonancia magnética (MRI) .
Las técnicas anteriores de formación de imagen generan cortes de imágenes bidimensionales del volumen objetivo del cuerpo del paciente. Son necesarios múltiples cortes de imagen 2D espaciados entre sí en una dirección longitudinal para obtener una vista general de los órganos internos (el volumen objetivo) del cuerpo del paciente a examinar. Existen diversas propuestas para combinar estos múltiples cortes de imagen 2D y transformarlos en una imagen tridimensional que resulta en una vista tridimensional 3D del volumen objetivo respecto al cual se está formando la imagen.
Una técnica de conversión 2D a 3D basada en por ejemplo formación de imagen mediante ultrasonido según el preámbulo anterior se expone en la Solicitud de Patente de los EE. UU. A-5 454 371.
La solicitud internacional publicada No. WO 02/062 224 expone la formación de imagen intraoperativa en donde se adquieren en tiempo real dos cortes de imagen a través de un volumen preoperativo de imagen según la posición de un instrumento quirúrgico, a saber una aguja de biopsia, y que se muestra al cirujano.
Es un objeto de la presente invención proporcionar un método mejorado y aparato utilizando una técnica más sofisticada de formación de imagen para utilizarla en combinación con un preplan (por ejemplo un plan de tratamiento) .
Según la invención el método se proporciona según la reivindicación 1.
Con estas características se realiza una técnica mejorada de formación de imagen, en donde el técnico en diagnóstico es capaz de controlar el medio de formación de imagen con respecto al volumen objetivo del cuerpo animal a examinar/ver. La imagen tridimensional así obtenida a partir de las imágenes bidimensionales sirve como un espacio imaginario de trabajo para el técnico en diagnóstico. A través de la manipulación dentro de dicho espacio de trabajo imaginario 3D mostrado al técnico en diagnóstico, este último puede manipular con facilidad el medio de formación de imagen con respecto al cuerpo del paciente para obtener una imagen bidimensional en tiempo real o cercana a tiempo real de la región de interés del volumen objetivo.
Dicha región de interés del volumen objetivo tiene que ser seleccionada dentro de la imagen imaginaria de 3D y basándose en dicha selección el método según la presente invención enfoca automáticamente el medio de formación de imagen sobre dicha región de interés del volumen objetivo.
Con esta técnica de formación de imagen según la presente invención el técnico en diagnóstico es capaz de rastrear fácilmente la presencia y posición de un instrumento quirúrgico con relación a dicho volumen objetivo por ejemplo con el propósito de tratamiento. Mas en particular con esta técnica de formación de imagen el técnico en diagnóstico es capaz de monitorear el curso del movimiento de dicho instrumento quirúrgico con relación a dicho volumen objetivo por ejemplo durante la inserción o navegación de dicho instrumento quirúrgico a través del cuerpo animal.
En un mejora posterior del método según la presente invención el método se caracteriza además por los pasos de comparar dicha posición real determinada con una posición preplanificada deseada de dicho instrumento quirúrgico con respecto a dicho volumen objetivo, y corregir dicha posición real determinada de dicho instrumento en vista de dicha posición preplanificada deseada con respecto a un volumen objetivo.
Por tanto aquí el técnico en diagnóstico es capaz de corregir de una manera sofisticada en tiempo real el curso del movimiento de dicho instrumento quirúrgico con respecto a dicho volumen objetivo. Especialmente cuando se opera la técnica de formación de imagen según la presente invención en combinación con un cierto preplan (por ejemplo un plan de tratamiento de radiación preplanificado para tratar cáncer de próstata con fuentes radioactivas) el método puede ser ventajosamente caracterizado además por el paso de monitorear dicho paso de corrección hasta que la posición real de dicho instrumento quirúrgico se corresponda con dicha poción preplanificada deseada.
El técnico en diagnóstico se apoya además para ejecutar dicho método de formación de imagen según la presente invención en una combinación con por ejemplo un preplan ya que el método se caracteriza además por los pasos de proyectar según dicho preplan durante el paso iii) de la reivindicación 1 un instrumento quirúrgico imaginario dentro de dicha imagen tridimensional que se muestra, y proyectar dentro de dicha imagen tridimensional la posición real de dicho instrumento quirúrgico como se determina en el paso vii) de la reivindicación 1.
Esto proporciona un sencillo control mediante retroalimentación pero ventajoso en el espacio imaginario tridimensional del técnico en diagnóstico ya que éste último con esto está informado visualmente de manera continúa acerca de la posición exacta del instrumento quirúrgico con respecto al volumen objetivo en relación con la posición esperada o deseada según preplan.
Es más, el método según la presente invención incluye el paso de almacenamiento de la fecha de la imagen obtenida con los pasos i) , ii) y/o v) de la reivindicación 1 utilizando métodos de almacenamiento.
El aparato según la presente invención está provisto de acuerdo con la reivindicación 6.
Cuando se utiliza el aparato según la presente invención se permite el control del medio de formación de imagen con respecto al volumen objetivo del cuerpo animal a examinar/ver. En lugar de controlar directamente el medio de formación de imagen con respecto al volumen objetivo por ejemplo mediante manipulación directa del medio de formación de imagen en una orientación específica con respecto al volumen objetivo, tal manipulación se realiza ahora de manera remota. La imagen tridimensional obtenida a partir de las imágenes bidimensionales sirve como un espacio imaginario... [Seguir leyendo]
Reivindicaciones:
1. Método para determinar la posición de un instrumento quirúrgico (28n) con respecto a un volumen objetivo dentro de un cuerpo animal según un preplan de braquiterapia indicando al menos una locación/profundidad del instrumento quirúrgico (28n’) , comprendiendo el método los pasos de:
i) obtener una pluralidad de imágenes bidimensionales (312D) de dicho volumen objetivo utilizando medios de formación de imagen (20, 21n) , estando dichas imágenes bidimensionales espaciadas entre sí en una dirección longitudinal, y estando representada cada imagen 2D por un corte de datos de imagen I (x, y, z) ;
ii) reconstruir a partir de dicha pluralidad de cortes de datos de imagen I (x, y, z) una imagen tridimensional (313D) de dicho volumen objetivo utilizando medios de transformación (23) , dicha imagen en 3D representada por un conjunto volumétrico de datos de imagen V (x, y, z) ;
iii) mostrar dicha imagen tridimensional (313D) de dicho volumen objetivo a un usuario utilizando medios de exposición, comprendiendo el método además los pasos de:
iv) generar el preplan comprendiendo un instrumento quirúrgico imaginario (28n’) utilizando la imagen tridimensional (313D) , seleccionar según dicho preplan al menos una locación objetivo imaginaria específica (37) que comprende dicho instrumento quirúrgico imaginario (28n’) dentro de dicha imagen tridimensional que se muestra mediante dicho medio de exposición utilizando medios de selección;
v) controlar automáticamente dichos medios de formación de imagen (20, 21n) con respecto a dicho volumen objetivo para obtener en tiempo real una única imagen bidimensional (312D’) representada por el corte de datos de imagen I (x, y, z) de una locación objetivo específica dentro de dicho volumen objetivo correspondiendo a dicha locación objetivo imaginaria específica (37) seleccionada dentro de dicha imagen tridimensional (313D) ;
vi) mostrar dicha imagen bidimensional en tiempo real (312D’) de dicha locación objetivo específica al usuario utilizando medios de exposición; y vii) determinar la posición actual de dicho instrumento quirúrgico (28n) dentro de dicha locación objetivo específica utilizando dicha imagen bidimensional en tiempo real (312D’) de dicha locación objetivo específica mostrada.
2. Método según la reivindicación 1, que comprende además los pasos de (viii) comparar dicha posición real determinada de dicho instrumento quirúrgico con una posición deseada preplanificada de dicho instrumento quirúrgico con respecto a dicho volumen objetivo y ix) corregir dicha posición real determinada de dicho instrumento quirúrgico en vista de dicha posición preplanificada deseada reposicionando dicho instrumento quirúrgico con respecto a un volumen objetivo.
3. Método según la reivindicación 1 o 2, que comprende además el paso de:
x) monitorear dicho paso de corrección ix) hasta que la posición real de dicho instrumento quirúrgico se corresponda con dicha posición preplanificada deseada.
4. Método según una cualquiera de las reivindicaciones precedentes, que comprende además los pasos de
xi) proyectar según dicho preplan durante el paso iii) un instrumento quirúrgico imaginario dentro de dicha imagen tridimensional que se muestra, y xii) proyectar dentro de dicha imagen tridimensional la posición real de dicho instrumento quirúrgico como se determina en el paso vii) .
5. Método según una cualquiera de las reivindicaciones precedentes, que comprende además el paso de
6. Aparato para determinar la posición de un instrumento quirúrgico (28n) con respecto a un volumen objetivo dentro de un cuerpo animal según un preplan indicando al menos una locación/profundidad del instrumento quirúrgico (28n) , que comprende:
xiii) almacenar los datos de la imagen obtenidos en los pasos i) , ii) y/o v) utilizando medios de almacenamiento.
medios de formación de imagen para obtener una pluralidad de imágenes bidimensionales (312D) de dicho volumen objetivo utilizando medios de formación de imagen (20, 21n) , estando espaciadas dichas imágenes bidimensionales entre sí en una dirección longitudinal, y estando representada cada imagen 2D por un corte de datos de imagen I (x, y, z) espaciados entre sí en una dirección longitudinal;
medios de transformación (23) para reconstruir a partir de dicha pluralidad de cortes de datos de imagen I (x, y, z) una imagen tridimensional (313D) de dicho volumen objetivo utilizando medios de transformación (23) , representada dicha imagen 3D por un conjunto volumétrico de datos de imagen V (x, y, z) ;
medios de almacenamiento para almacenar dicha pluralidad de cortes de datos de imagen I (x, y, z) y dicho conjunto volumétrico de datos de imagen V (x, y, z) ;
medios de exposición (24a) para mostrar dicha imagen tridimensional (313D) de dicho volumen objetivo a un usuario utilizando medios de exposición, además caracterizado por:
un sistema de computación (24) para generar el preplan utilizando la imagen 3D (313D) , comprendiendo dicho preplan un instrumento quirúrgico imaginario (28n’) ;
medios de selección para seleccionar según dicho preplan al menos una locación objetivo imaginaria específica (37) que comprende dicho instrumento quirúrgico imaginario (28n’) dentro de dicha imagen tridimensional (313D) que se muestra mediante dichos medios de exposición;
medios de control (22) para controlar automáticamente dichos medios de formación de imagen (20, 21n) con respecto a dicho volumen objetivo (11) para obtener en tiempo real una única imagen bidimensional (312D’) representada por el corte de datos de imagen I (x, yz, z) de una locación objetivo específica dentro de dicho volumen objetivo correspondiente a dicha locación objetivo imaginaria específica (37) seleccionada dentro de dicha imagen tridimensional; y medios para determinar la posición real de dicho instrumento quirúrgico (28n) dentro de dicha locación objetivo específica utilizando dicha imagen bidimensional en tiempo real (312D’) de dicha locación objetivo específica.
7. Aparato según la reivindicación 6, además caracterizado por
- medios de comparación para comparar dicha posición real determinada de dicho instrumento quirúrgico con una posición deseada de dicho instrumento quirúrgico tal como se preplanificó y
- medios de corrección para corregir dicho posición real determinada en vista de dicha posición preplanificada deseada reposicionando dicho instrumento quirúrgico con respecto a un volumen objetivo.
8. Aparato según la reivindicación 6 o 7, además caracterizado por medios de desplazamiento (22) para desplazar dichos medios de formación de imagen (20) con respecto a dicho volumen objetivo (11) basándose en dichos medios de control.
9. Aparato según la reivindicación 8, caracterizado porque dichos medios de desplazamiento (22) son capaces de desplazar dichos medios de formación de imagen (20) en una dirección longitudinal y/o rotatoria.
10. Aparato según una cualquiera de las reivindicaciones 6-9, caracterizado porque dichos medios de formación de imagen son medios de formación de imagen mediante ultrasonido, por ejemplo una sonda rectal de formación de imagen mediante ultrasonido.
11. Aparato según una cualquiera de las reivindicaciones 6 o 7, caracterizado porque dichos medios de formación de imagen son medios de formación de imagen magnéticos nucleares.
12. Aparato según la reivindicación 11, caracterizado porque dichos medios de control están dispuestos para energizar las bobinas de gradiente apropiadas de los medios de formación de imagen magnéticos nucleares.
13. Aparato según una cualquiera de las reivindicaciones 6-12 caracterizado porque dichos medios de selección comprenden un puntero de exposición, un puntero de ratón o un dispositivo de entrada, como un teclado.
14. Aparato según una cualquiera de las reivindicaciones 6-13, caracterizado porque dicho instrumento quirúrgico es al menos una aguja de implante.
15. Aparato según una cualquiera de las reivindicaciones 6-13, caracterizado porque dicho instrumento quirúrgico se considera al menos una fuente emisora de radiación, por ejemplo una semilla radioactiva de braquiterapia o fuente HDR.
Patentes similares o relacionadas:
 Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Método para usar una cubierta de sonda, del 29 de Julio de 2020, de SABAN VENTURES PTY LIMITED: Un método para prevenir la contaminación de una sonda ultrasónica descontaminada que comprende el paso de, inmediatamente después de la desinfección, […]
Sistemas para el tratamiento de enfermedades del ojo, del 22 de Julio de 2020, de ALCON, INC: Un dispositivo para tratar un ojo de mamífero que tiene un párpado , que comprende: un escudo escleral que puede posicionarse cerca de una superficie […]
Herramienta de pinza de agarre, del 22 de Julio de 2020, de COLOPLAST A/S: Herramienta de pinza de agarre para extraer una endoprótesis desde un paciente, que comprende: una carcasa de mango que forma una parte […]
Adaptadores quirúrgicos para usar entre el conjunto de mango quirúrgico y las unidades de carga quirúrgica, del 22 de Julio de 2020, de Covidien LP (100.0%): Un conjunto adaptador para interconectar selectivamente una unidad de carga quirúrgica y un conjunto de mango que tiene al menos un […]
Aparatos de grapado quirúrgico, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aparato de grapado quirúrgico , que comprende: una carcasa que tiene un actuador ; un miembro alargado que se extiende desde la carcasa; […]
Aplicadores que tienen sujetadores implantables para braquiterapia, del 15 de Julio de 2020, de Covidien LP (100.0%): Un aplicador de sujetadores que comprende: una porción de cuerpo que incluye un conjunto de mango ; un conjunto […]
Interfaz de manipulador robótico para herramientas quirúrgicas articuladas, del 8 de Julio de 2020, de Microsure B.V: Interfaz de manipulador robótico para acoplar una herramienta quirúrgica articulada a un manipulador de un robot quirúrgico, comprendiendo […]
Implante quirúrgico para la reparación de la pared muscular, del 1 de Julio de 2020, de JOHNSON & JOHNSON MEDICAL GMBH: Un implante quirúrgico adaptado para reparar un defecto del tejido o de la pared muscular, que comprende una sección exterior y una sección interior (6; […]