Dispositivos y procedimientos para determinar la dirección, velocidad y/o distancia de vehículos.
Dispositivo para determinar la dirección y/o velocidad de un vehículo (2) en una calzada (3),
caracterizado por un sensor (4) que funciona según el procedimiento de sección luminosa y está orientado hacia la calzada (3) para grabar el contorno superficial de un vehículo (2) y por un dispositivo de evaluación (6) que está conectado al sensor (4) y determina la dirección (r) y/o la velocidad (v) del vehículo (2) a partir del desplazamiento del contorno superficial en dos imágenes consecutivas (12, 13) .
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E09450188.
Solicitante: KAPSCH TRAFFICCOM AG.
Nacionalidad solicitante: Austria.
Dirección: Am Europlatz 2 1120 Wien AUSTRIA.
Inventor/es: NAGY, OLIVER, Leopold,Alexander, Schechora,Andreas.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01B11/25 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 11/00 Disposiciones de medida caracterizadas por la utilización de medios ópticos (instrumentos de los tipos cubiertos por el grupo G01B 9/00 en sí G01B 9/00). › mediante la proyección de un patrón, p. ej.franjas de Moiré, sobre el objeto (G01B 11/255 tiene prioridad).
- G08G1/04 G […] › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › que utilizan detectores ópticos o ultrasónicos.
- G08G1/052 G08G 1/00 […] › con disposiciones para determinar la velocidad o el exceso de velocidad.
- G08G1/056 G08G 1/00 […] › con disposiciones para distinguir la dirección de circulación.
PDF original: ES-2377361_T3.pdf
Fragmento de la descripción:
Dispositivos y procedimientos para determinar la dirección, velocidad y/o distancia de vehículos La presente invención se refiere a dispositivos y procedimientos para determinar la dirección, velocidad y/o distancia de vehículos en una calzada.
La determinación de la dirección y la velocidad de un vehículo tiene una importancia decisiva en la vigilancia y la seguridad del tráfico para la detección de conductores suicidas y el cumplimiento de los límites de velocidad. La determinación de la distancia entre vehículos se aplica, por ejemplo, en túneles, para garantizar el cumplimiento de las distancias mínimas con el fin de evitar colisiones por alcance.
Para la determinación de la dirección, velocidad o distancia de vehículos se usan en la actualidad los más diversos sistemas, como las barreras de luz, los bucles de inducción enterrados en la calzada, los escáneres de radar o láser, etc. Todos los sistemas conocidos tienen en común que son sumamente costosos: Los bucles de inducción requieren abrir la superficie de la calzada, las barreras de luz necesitan instalaciones en ambos bordes de la calzada y los escáneres de radar o láser son costosos desde el punto de vista constructivo, caros y emiten, dado el caso, radiación electromagnética perturbadora que no se desea. Así, por ejemplo, del documento US 2002/0140924 A1 se conoce un escáner de láser que detecta el contorno superficial de un vehículo y posibilita sobre esta base la medición de su velocidad, pero requiere, sin embargo, una construcción mecánica y óptica costosa.
La invención tiene el objetivo de crear dispositivos y procedimientos para determinar la dirección, velocidad y/o distancia de vehículos, que sean más fáciles de realizar que las soluciones conocidas.
Este objetivo se consigue en un primer aspecto de la invención con un dispositivo caracterizado por un sensor que funciona según el procedimiento de sección luminosa y está orientado hacia la calzada para grabar el contorno superficial de un vehículo y por un dispositivo de evaluación que está conectado al sensor y determina la dirección y/o la velocidad del vehículo a partir del desplazamiento del contorno superficial en dos imágenes consecutivas.
En un segundo aspecto, el objetivo de la invención se consigue con un dispositivo caracterizado por un sensor que funciona según el procedimiento de sección luminosa y está dirigido hacia un tramo de la calzada para grabar los contornos superficiales de vehículos en el tramo, así como por un dispositivo de evaluación que está conectado al sensor y determina la distancia entre vehículos situados uno tras otro a partir de los contornos superficiales.
De este modo se usa por primera vez el procedimiento de sección luminosa, conocido en la técnica, para determinar la dirección de marcha, la velocidad y la distancia de vehículos. Los sensores de sección luminosa proyectan una luz estructurada, por ejemplo, una única línea de luz ("abanico de luz" o "raya de luz") , una pluralidad de líneas de luz paralelas ("franjas de luz", la llamada "fringe projection", proyección de franjas) o bien una rejilla completa de luz, en un primer ángulo sobre un objeto que se va a detectar y graban el objeto con la estructura proyectada sobre éste desde un ángulo diferente a la dirección de proyección, lo que permite determinar la estructura superficial del objeto a partir de las distorsiones de la estructura en la imagen grabada.
Los dispositivos de la invención no requieren componentes enterrados en la calzada, se pueden montar en sólo un único lado de la calzada y necesitan sólo medios muy simples de proyección de luz, cámara y procesamiento de imágenes en comparación con escáneres de radar o láser.
Por consiguiente, el sensor comprende al menos un proyector de patrones de luz que desde una primera ubicación proyecta un patrón de luz, preferentemente una rejilla de luz, sobre la calzada, así como una cámara que desde una segunda ubicación graba el patrón de luz proyectado y a partir de sus distorsiones graba el contorno superficial, como es conocido en la técnica.
Una realización especialmente ventajosa del dispositivo para determinar la distancia en calzadas de un túnel se caracteriza porque en el techo del túnel están montados sucesivamente proyectores de patrones de luz que proyectan sobre la calzada una rejilla de luz grabada por una cámara común. De este modo, el techo del túnel se puede usar para montar los proyectores de patrones de luz y, por tanto, un gran tramo, e incluso todo el túnel, se puede iluminar con una rejilla de luz.
Es especialmente favorable que el proyector de patrones de luz sea un emisor de láser o diodo luminoso, mediante lo que se pueden obtener altas densidades luminosas.
La invención posibilita en especial también usar como cámara una cámara de vigilancia de tráfico ya existente, lo que reduce una vez más el costo constructivo.
En un tercer aspecto, la invención consigue sus objetivos con un procedimiento para determinar la dirección y/o velocidad de un vehículo en una calzada, con los siguientes pasos:
a) proyectar un patrón de luz, preferentemente una rejilla de luz, sobre la calzada desde una primera ubicación y grabar el patrón de luz proyectado desde una segunda ubicación para captar una primera imagen del contorno superficial de un vehículo a partir de las distorsiones del patrón de luz, b) repetir el paso a) en un momento posterior para captar una segunda imagen del contorno superficial del vehículo, y c) determinar la dirección y la velocidad del vehículo a partir del desplazamiento de su contorno superficial en las dos imágenes.
En un cuarto aspecto, la invención crea un procedimiento para determinar la distancia entre vehículos en una calzada, con los siguientes pasos:
proyectar un patrón de luz, preferentemente una rejilla de luz, sobre un tramo de la calzada desde al menos una primera ubicación, grabar el patrón de luz proyectado desde una segunda ubicación para detectar los contornos superficiales de vehículos en el tramo a partir de las distorsiones del patrón de luz, y determinar la distancia entre vehículos situados uno tras otro a partir de los contornos superficiales detectados.
En relación con las ventajas y otras características de los procedimientos según la invención se remite a las explicaciones sobre los dispositivos de la invención que aparecen arriba.
En grandes superficies de tráfico se pueden instalar varios sensores o dispositivos que funcionan de forma conjunta y siguen el movimiento de vehículos.
La invención se explica detalladamente a continuación por medio de ejemplos de realización representados en los dibujos adjuntos. Los dibujos muestran:
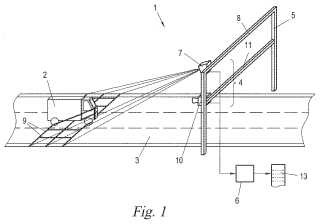
Fig. 1 el dispositivo y el procedimiento de la invención para determinar la dirección y/o velocidad de un vehículo por medio de una vista esquemática en perspectiva del dispositivo; Fig. 2 dos imágenes consecutivas del patrón de luz proyectado sobre la calzada al pasar un vehículo por la calzada; Fig. 3 el dispositivo y el procedimiento de la invención para determinar la distancia entre vehículos en un túnel por medio de una vista esquemática en perspectiva del dispositivo; y Fig. 4 una imagen de un contorno superficial de vehículos en el túnel, determinado con el dispositivo de la figura 3.
La figura 1 muestra un dispositivo 1 para determinar la dirección y/o velocidad de un vehículo 2 en una calzada 3. El dispositivo 1 presenta un sensor 4 que funciona según el procedimiento de sección luminosa, está montado en un larguero de pórtico 5 situado sobre la calzada 3 y se encuentra conectado a un dispositivo de evaluación 6. El sensor 4 comprende, por una parte, un proyector de patrones de luz 7 que proyecta un patrón de luz 9 sobre la calzada 3 desde una primera ubicación, en este caso un larguero superior 8 del pórtico 5, y, por la otra parte, una cámara 10 que graba una imagen 12, 13 del patrón de luz proyectado 9 desde una segunda ubicación, en este caso un larguero inferior 11 del pórtico 5, como muestran las figuras 2a y 2b en dos momentos consecutivos.
En cada uno de estos momentos, la unidad de evaluación 6 determina el contorno superficial del vehículo 2 a partir de las distorsiones del patrón de luz 9 en las imágenes 12, 13, que aparecen debido al relieve superficial de un vehículo 2 desde el ángulo de visualización de la cámara 8 que se desvía de la dirección de proyección de la luz.... [Seguir leyendo]
Reivindicaciones:
1. Dispositivo para determinar la dirección y/o velocidad de un vehículo (2) en una calzada (3) , caracterizado por un sensor (4) que funciona según el procedimiento de sección luminosa y está orientado hacia la calzada (3) para grabar el contorno superficial de un vehículo (2) y por un dispositivo de evaluación (6) que está conectado al sensor (4) y determina la dirección (r) y/o la velocidad (v) del vehículo (2) a partir del desplazamiento del contorno superficial en dos imágenes consecutivas (12, 13) .
2. Dispositivo para determinar la distancia entre vehículos (2) en una calzada (3) , caracterizado por un sensor (4) que funciona según el procedimiento de sección luminosa y está dirigido hacia un tramo (14) de la calzada (3) para grabar los contornos superficiales de vehículos (3) en el tramo (14) , así como por un dispositivo de evaluación (6) que está conectado al sensor (4) y determina la distancia ( a) entre vehículos (2) situados uno tras otro a partir de los contornos superficiales.
3. Dispositivo según la reivindicación 1 ó 2, caracterizado porque el sensor (4) comprende al menos un proyector de patrones de luz (6) que desde una primera ubicación proyecta un patrón de luz (9) , preferentemente una rejilla de luz, sobre la calzada (3) , así como una cámara (7) que desde una segunda ubicación graba el patrón de luz proyectado (9) y a partir de sus distorsiones graba el contorno superficial.
4. Dispositivo según las reivindicaciones 2 y 3 para una calzada (3) en un túnel (15) , caracterizado porque en el techo del túnel (15) están montados sucesivamente proyectores de patrones de luz (7) que proyectan sobre la calzada (3) una rejilla de luz (9) grabada por una cámara común (10) .
5. Dispositivo según la reivindicación 3 ó 4, caracterizado porque el proyector de patrones de luz (7) es un emisor de láser o diodo luminoso.
6. Dispositivo según una de las reivindicaciones 3 a 5, caracterizado porque la cámara (10) es una cámara de vigilancia de tráfico.
7. Dispositivo según una de las reivindicaciones 1 a 6, caracterizado porque varios dispositivos (1) , dispuestos uno al lado de otro, funcionan de forma conjunta para seguir el desarrollo de movimientos de vehículos.
8. Dispositivo según una de las reivindicaciones 1 a 7, caracterizado porque varios sensores (4) , dispuestos uno al lado de otro en un sistema conjunto, son controlados y consultados por el dispositivo de evaluación (6) para seguir el desarrollo de movimientos de vehículos.
9. Procedimiento para determinar la dirección y/o velocidad de un vehículo (2) en una calzada (3) , con los siguientes pasos:
a) proyectar un patrón de luz (9) , preferentemente una rejilla de luz, sobre la calzada (3) desde una primera ubicación y grabar el patrón de luz proyectado (9) desde una segunda ubicación para captar una primera imagen (12) del contorno superficial de un vehículo (2) a partir de las distorsiones del patrón de luz (9) , b) repetir el paso a) en un momento posterior para captar una segunda imagen (13) del contorno superficial del vehículo (2) , y c) determinar la dirección y la velocidad del vehículo (2) a partir del desplazamiento ( s) de su contorno superficial en las dos imágenes (12, 13) .
10. Procedimiento para determinar la distancia entre vehículos (2) en una calzada (3) , con los siguientes pasos:
proyectar un patrón de luz (9) , preferentemente una rejilla de luz, sobre un tramo (14) de la calzada (3) desde al menos una primera ubicación, grabar el patrón de luz proyectado (9) desde una segunda ubicación para detectar los contornos superficiales de vehículos (3) en el tramo (14) a partir de las distorsiones del patrón de luz (9) , y determinar la distancia ( s) entre vehículos (3) situados uno tras otro a partir de los contornos superficiales detectados.
11. Procedimiento según la reivindicación 10, caracterizado porque el patrón de luz (9) es una rejilla de luz que se proyecta sobre la calzada (3) mediante varios proyectores de patrones de luz (7) situados sucesivamente en el tramo (14) .
12. Procedimiento según una de las reivindicaciones 9 a 11, caracterizado porque el patrón de luz (9) se graba con una cámara de vigilancia de tráfico.
REFERENCIAS CITADAS EN LA DESCRIPCIÓN
Esta lista de referencias citadas por el solicitante es únicamente para la comodidad del lector. No forma parte del 5 documento de la patente europea. A pesar del cuidado tenido en la recopilación de las referencias, no se pueden excluir errores u omisiones y la EPO niega toda responsabilidad en este sentido.
Documentos de patente citados en la descripción
• US 20020140924 A1 [0003]
Patentes similares o relacionadas:
Procedimiento para generar un registro digital y una unidad de carretera de un sistema de peaje de carreteras que implemente el procedimiento, del 5 de Febrero de 2020, de KAPSCH TRAFFICCOM AG: Un procedimiento para generar un registro digital (E) de un vehículo en un sistema de peaje de carreteras , que comprende, en una unidad de carretera del sistema […]
DISTANCIÓMETRO VIAL, del 7 de Agosto de 2019, de ZAPATERO GARCIA, Julio: 1. Dispositivo de tráfico que se caracteriza por ir instalado en un vehículo informando sobre la distancia de seguridad que se lleva en cada momento con respecto […]
Sistema y método para medir el flujo del tráfico de un área, del 26 de Abril de 2019, de CUENDE INFOMETRICS, S.A.: Un sistema para estimar el flujo del tráfico real de un área, comprendiendo el sistema : • imágenes aéreas de un área tomadas a intervalos […]
Dispositivo de peaje o sistemas telemáticos, del 3 de Abril de 2019, de KAPSCH TRAFFICCOM AB: Método para controlar un sistema de peaje que comprende una pluralidad de sensores de imagen, que pueden combinar la información entre sí para estimar una altura, una […]
Procedimiento de control de un sistema de vigilancia de tráfico, del 18 de Marzo de 2019, de KAPSCH TRAFFICCOM AB: Procedimiento para controlar un sistema de vigilancia de tráfico, en el que el sistema tiene una pluralidad de sensores (100a-100d) estereoscópicos […]
Sistema y métodos para el soporte de vehículos autónomos por medio de la percepción ambiental y calibración y verificación de sensores, del 6 de Marzo de 2019, de Signify Holding B.V: Un sistema de soporte para vehículo autónomo caracterizado por que comprende: una red de iluminación que tiene: una pluralidad de unidades […]
Sistema de vigilancia del comportamiento del tráfico, del 8 de Noviembre de 2018, de KAPSCH TRAFFICCOM AB: Un método para supervisar el comportamiento del tráfico entre una pluralidad de vehículos por medio de un dispositivo de cámara estereoscópica conectado […]
Sensor mejorado de telémetro de láser, del 8 de Noviembre de 2017, de OSI Optoelectronics: Un sistema para determinar la forma tridimensional de un vehículo , comprendiendo el sistema: un sensor de distancia que comprende un transmisor de […]