Aparato para la manipulación de perfiles a maquinizar.
Un aparato (100) para manipular perfiles (10) a maquinizar, que comprende:
- una unidad (110) de alimentación que comprende una superficie (111) de carga de los perfiles (10) quepresenta una zona (112) de entrada y una zona (114) de salida;
- unos primeros medios (116) de desplazamiento asociados con dicha unidad (110) de alimentación ycapaces de transportar los perfiles (10) desde la zona (112) de entrada hacia la zona (114) de salida;
- una unidad (150) de maquinizar capaz de recibir los perfiles (10) desde dicha unidad (110) dealimentación y que comprende unos medios (156) de maquinizar capaces de actuar sobre dichos perfiles(10);
- unos medios (152) de soporte asociados con dicha unidad (150) de maquinizar y capaces de soportar almenos un perfil (10) durante dichas operaciones de maquinizar;
- unos medios (154) de ajuste capaces de actuar sobre dichos medios (152) de soporte para adaptar suconfiguración a la forma de dicho al menos un perfil (10) que debe ser soportado,
caracterizado porque comprende:
- unos medios (170) de adquisición de vídeo situados en las inmediaciones de dicha unidad (110) dealimentación y configurados para adquirir una información acerca de la forma de dichos perfiles (10)transportados sobre dicha unidad (110) de alimentación y generar una señal eléctrica (20) dependiendo dedicha información adquirida;
- unos medios (160) de procesamiento en comunicación de señal con dichos medios (170) de adquisiciónde vídeo y dichos medios (154) de ajuste y configurados para:
- procesar la señal eléctrica (20) generada por dichos medios (170) de adquisición de vídeo con elfin de determinar la forma de dichos perfiles;
- generar una señal procesada (22) que indica la forma de dichos perfiles transportados sobredicha unidad (110) de alimentación;
- suministrar dicha señal procesada (22) a dichos medios (154) de ajuste con el fin de hacerposible que dichos medios (154) de ajuste actúen sobre dichos medios (152) de soporte paraadaptar su configuración a la forma de los perfiles (10) que deben ser soportados para que dicho almenos un perfil (10) sea soportado de manera estable por dichos medios (152) de soporte durantedichas operaciones de maquinizar.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08425092.
Solicitante: ME.C.AL. S.P.A.
Nacionalidad solicitante: Italia.
Dirección: VIA TORRE BERETTI S.N. 27030 FRASCAROLO (PV) ITALIA.
Inventor/es: CAVEZZALE, ENNIO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q17/20 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 17/00 Dispositivos para indicar o medir sobre las máquinas herramientas (para el control automático o la regulación del movimiento de avance, de la velocidad de corte o de la posición de la herramienta o de la pieza B23Q 15/00). › para indicar o medir las características de la pieza de trabajo, p. ej. el contorno, las dimensiones, la dureza.
- B23Q17/24 B23Q 17/00 […] › utilizando medios ópticos.
- B23Q7/00 B23Q […] › Dispositivos para la manipulación de piezas, especialmente combinados a las máquinas-herramientas o dispuestos en estas máquinas o especialmente concebidos para ser utilizados en relación con estas máquinas, p. ej. para el transporte, la carga, la colocación, la descarga, la selección (incorporados a los husillos de trabajo B23B 13/00, B23B 19/02; para tornos automáticos o semiautomáticos B23B 15/00).
PDF original: ES-2388149_T3.pdf
Fragmento de la descripción:
Aparato para la manipulación de perfiles a maquinizar
La presente invención se refiere a un aparato y a un procedimiento para la manipulación de perfiles a maquinizar, de modo preferente, perfiles con una extensión sustancialmente longitudinal de acuerdo con los preámbulos de las reivindicaciones 1 y 8, tal y como se conocen, por ejemplo, a partir del documento EP-A-1 516 696.
Dicho aparato y dicho procedimiento pueden ser utilizados de manera provechosa en mayoristas o plantas industriales para el maquinado de perfiles.
Los perfiles son generalmente utilizados para formar estructuras y piezas de soporte de cargas en armazones y / o para construcciones metálicas en general.
Típicamente, es necesario llevar a cabo, sobre estos perfiles, unas operaciones de maquinizar predefinidas, como por ejemplo unas operaciones de fresado, taladrado, de corte o soldadura.
Es conocido el sistema de utilizar aparatos de manipulación de perfiles en los que los perfiles son transportados por medio de una unidad de alimentación, desde una zona de entrada hacia una zona de salida y su recepción por una unidad de maquinizar que efectúa las operaciones de maquinizar.
Debe señalarse, sin embargo, que los perfiles a maquinizar pueden presentar una forma y que los perfiles, así mismo, pueden ser diferentes unos de otros.
Por consiguiente, durante las operaciones de maquinizar, es necesario que los perfiles sean soportados mediante unos medios de soporte apropiados los cuales, con independencia de la forma del perfil que va a ser maquinado, sean capaces de soportar de forma estable el perfil, así como que permitan su fácil desenganche al final de las operaciones de maquinizar mencionadas con anterioridad.
De acuerdo con la técnica conocida, los aparatos de manipulación incorporan unos medios de ajuste que actúan sobre los medios de soporte mencionados con anterioridad con el fin de adaptar su configuración a la forma y / o al contorno del perfil. En particular, el perfil, una vez que llega a la unidad de maquinizar, se sitúa en contacto con unos componentes mecánicos, como por ejemplo unos calibres o galgas palpadores los cuales miden su forma y / o contorno. Unos transductores conectados a las galgas palpadores envían, a continuación, unas señales relacionadas con la medición del perfil a los medios de soporte, de forma que dichos medios están configurados para soportar el perfil con firmeza.
Estos aparatos, sin embargo, presentan determinados inconvenientes. En primer lugar, debe señalarse que la medición de las formas y / o contornos de los perfiles por medio de los componentes mecánicos requiere una cantidad de tiempo no desdeñable en comparación con el tiempo de maquinizar, dado que se requiere accionar los palpadores para que se desplacen desde y hacia el perfil y para que lleven a cabo un ajuste de precisión del desplazamiento de alimentación de las galgas palpadores con el fin de verificar la posición efectiva en la que se sitúan en contacto con el perfil. Así mismo, dado que la medición y la determinación de las formas y / o de los contornos de los perfiles se llevan a cabo únicamente en la unidad de maquinizar, el funcionamiento de los aparatos debe ser interrumpida con el fin de permitir que las galgas palpadores lleven a cabo los movimientos necesarios para desarrollar medición de los perfiles.
De lo expuesto se desprende que se necesita contar con un aparato para manipular perfiles que permita una medición fácil y continúa de la forma y / o del contorno de los perfiles sin interrumpir el proceso de maquinizar, el cual no dependa de la medición de la forma y / o del contorno de los perfiles en una unidad predeterminada y que sea más versátil.
El objetivo de la presente invención consiste, por consiguiente, en proponer un aparato para la manipulación de perfiles con el cual sea posible satisfacer las exigencias referidas con anterioridad y superar los inconvenientes mencionados en las líneas anteriores con respecto a la técnica conocida.
Este objetivo se consigue mediante un aparato para la manipulación de perfiles de acuerdo con la reivindicación 1.
De acuerdo con un aspecto adicional, la invención se refiere a un procedimiento para la manipulación de perfiles de acuerdo con la Reivindicación. 8
Características distintivas y ventajas adicionales de la presente invención se pondrán de manifiesto a partir de la descripción detallada subsecuente de algunas de sus formas de realización preferentes no limitativas suministradas con referencia a los dibujos que se acompañan, en los cuales:
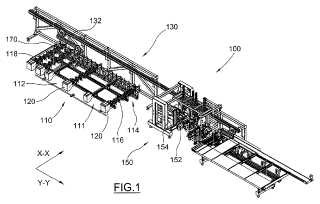
- La Figura 1 muestra una vista global de un aparato de manipulación de perfiles de acuerdo con la presente invención;
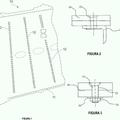
- la Figura 2 muestra parte de una unidad de alimentación del aparato de manipulación de perfiles de acuerdo con la Figura 1;
- la Figura 3 muestra un diagrama de bloques del procedimiento para la manipulación de perfiles de acuerdo con la presente invención.
Con referencia a las Figuras 1 y 2, la referencia numeral 100 indica, en términos generales, un aparato de manipulación de perfiles diseñado para manipular y maquinar unos perfiles 10, Los perfiles 10 son perfiles convencionales en el sector del maquinado y pueden estar fabricados con diferentes materiales, como por ejemplo, metal, plástico o, así mismo , metal o aluminio.
Tal y como se muestra en la forma de realización de acuerdo con la Figura 1, el aparato 100 de manipulación presenta una unidad 110 de alimentación, una unidad 130 de transporte y una unidad 150 de maquinizar.
La unidad 110 de alimentación comprende una superficie 111 de soporte la cual presenta una zona 112 de entrada y una zona 114 de salida, y unos primero medios 116 de desplazamiento capaces de transportar los perfiles 10 desde la zona 112 de entrada hasta la zona 114 de salida, en una dirección de transporte X – X, la cual, en el ejemplo, es perpendicular a la dirección de extensión Y – Y de los perfiles 10.
De acuerdo con la forma de realización mostrada en las figuras, los primeros medios 116 de desplazamiento comprenden una pluralidad de elementos 120 de transporte que se extienden en la dirección de transporte X – X y que están dispuestos unos al lado de otros en la dirección Y – Y .
De acuerdo con una forma de realización, la unidad 110 de alimentación presenta unos medios 118 de localización los cuales están situados a lo largo de la superficie 111 de soporte y se extienden en la dirección X – X. Estos medios 118 de localización definen la posición de fin de trayecto de los perfiles 10 en la dirección Y – Y y guían el desplazamiento de los perfiles 10 en la dirección de transporte X – X desde la zona 112 de entrada hasta la zona 114 de salida.
La unidad 130 de transporte está en una posición adyacente a la unidad 110 de alimentación y coopera con ella para recoger los perfiles 10 de los primeros medios 116 de desplazamiento, dentro de la zona 114 de salida. La unidad 110 de alimentación está provista de unos segundos medios 132 de desplazamiento capaces de transportar los perfiles recogidos de la unidad 110 de alimentación hacia la unidad 150 de maquinizar en la dirección de transporte, la cual, en el ejemplo, se corresponde con la dirección Y – Y de extensión de los perfiles 10.
La unidad 150 de maquinizar lleva a cabo, sobre los perfiles 10, las operaciones de maquinizar requeridas, como por ejemplo el taladrado, el fresado, el corte o la soldadura. Con este fin, de una manera en sí misma conocida, el aparato 100 de manipulación estará equipado con los correspondientes medios de fresado, taladrado, corte o soldadura.
En el curso de las operaciones de maquinizar mencionadas con anterioridad, es necesario asegurar que los perfiles 10 sean soportados de manera estable, con independencia de su forma y / o su contorno.
Tal y como se muestra en la Figura 2, de hecho, los perfiles 10 pueden presentar unos perfiles en sección transversal diferentes dependiendo de su uso. En el ejemplo mostrado, la referencia numeral 12 indica un perfil el cual presenta un perfil transversal con forma de T, la referencia numeral 13 indica un perfil con un perfil transversal con forma de L, y la referencia numeral 14 indica un perfil con un perfil transversal irregular.
El... [Seguir leyendo]
Reivindicaciones:
1. Un aparato (100) para manipular perfiles (10) a maquinizar, que comprende:
- una unidad (110) de alimentación que comprende una superficie (111) de carga de los perfiles (10) que presenta una zona (112) de entrada y una zona (114) de salida;
- unos primeros medios (116) de desplazamiento asociados con dicha unidad (110) de alimentación y capaces de transportar los perfiles (10) desde la zona (112) de entrada hacia la zona (114) de salida;
- una unidad (150) de maquinizar capaz de recibir los perfiles (10) desde dicha unidad (110) de alimentación y que comprende unos medios (156) de maquinizar capaces de actuar sobre dichos perfiles (10) ;
- unos medios (152) de soporte asociados con dicha unidad (150) de maquinizar y capaces de soportar al menos un perfil (10) durante dichas operaciones de maquinizar;
- unos medios (154) de ajuste capaces de actuar sobre dichos medios (152) de soporte para adaptar su configuración a la forma de dicho al menos un perfil (10) que debe ser soportado,
caracterizado porque comprende:
- unos medios (170) de adquisición de vídeo situados en las inmediaciones de dicha unidad (110) de alimentación y configurados para adquirir una información acerca de la forma de dichos perfiles (10) transportados sobre dicha unidad (110) de alimentación y generar una señal eléctrica (20) dependiendo de dicha información adquirida;
- unos medios (160) de procesamiento en comunicación de señal con dichos medios (170) de adquisición de vídeo y dichos medios (154) de ajuste y configurados para:
- procesar la señal eléctrica (20) generada por dichos medios (170) de adquisición de vídeo con el fin de determinar la forma de dichos perfiles;
- generar una señal procesada (22) que indica la forma de dichos perfiles transportados sobre dicha unidad (110) de alimentación;
- suministrar dicha señal procesada (22) a dichos medios (154) de ajuste con el fin de hacer posible que dichos medios (154) de ajuste actúen sobre dichos medios (152) de soporte para adaptar su configuración a la forma de los perfiles (10) que deben ser soportados para que dicho al menos un perfil (10) sea soportado de manera estable por dichos medios (152) de soporte durante dichas operaciones de maquinizar.
2. Aparato (100) de acuerdo con la Reivindicación 1, en el cual dichos medios (170) de adquisición de vídeo están situados corriente debajo de dicha zona (112) de entrada.
3. Aparato (100) de acuerdo con las Reivindicaciones 1 o 2, en el cual dichos medios (170) de adquisición de vídeo están situados en correspondencia con dicha zona (114) de salida.
4. Aparato (100) de acuerdo con una cualquiera de las Reivindicaciones 1 a 3, en el cual dicha unidad (110) de alimentación está equipada con unos medios (118) de localización situados a lo largo de la superficie (111) de soporte para definir la posición de fin de carrera de los perfiles (10) en la dirección de extensión (Y – Y ) de los perfiles, estando dispuestos dichos medios (170) de adquisición de vídeo en una posición adyacente a dichos medios (118) de localización.
5. Aparato (100) de acuerdo con una cualquiera de las Reivindicaciones 1 a 4, que comprende una unidad (130) de transporte para dichos perfiles (10) , situados entre dicha unidad (110) de alimentación y dicha unidad (150) de maquinizar, comprendiendo dicha unidad (130) de transporte unos segundos medios (132) de desplazamiento capaces de transportar, en sucesión, dicho al menos un perfil (10) desde dicha unidad (110) de alimentación hacia dicha unidad (150) de maquinizar, en una dirección de transporte (Y – Y) .
6. Aparato (100) de acuerdo con la Reivindicación 5, en el cual dicha dirección de transporte (Y – Y) de dichos segundos medios (132) de desplazamiento es sustancialmente perpendicular a dicha dirección de transporte (X – X) de dichos perfiles (10) situados dentro de dicha unidad (110) de alimentación.
7. Aparato (100) de acuerdo con una cualquiera de las Reivindicaciones 1 a 6, en el cual dichos medios (170) de adquisición están elegidos entre el grupo que comprende una telecámara, una cámara inteligente, un escáner, un profilómetro y un dispositivo de detección eléctrico.
8. Procedimiento para la manipulación de perfiles (10) , comprendiendo dicho procedimiento las etapas de:
a) el transporte de dichos perfiles (10) sobre una unidad (110) de alimentación desde una zona (112) de entrada hacia una zona (114) de salida por medio de los primeros medios (116) de desplazamiento asociados con dicha unidad (110) de alimentación;
b) la recepción de dichos perfiles (10) dentro de una unidad (150) de maquinizar desde dicha unidad (110) 5 de alimentación, comprendiendo dicha unidad (150) de maquinizar unos medios (156) de maquinizar capaces de actuar sobre dichos perfiles (10) ;
c) el soporte de dichos perfiles (10) por medio de los medios (152) de soporte, asociados con dicha unidad
(150) de maquinizar, siendo dichos medios (152) de soporte capaces de soportar dichos perfiles (10) durante dichas operaciones de maquinizar ;
d) la actuación sobre dichos medios (152) de soporte por medio de los medios (154) de ajuste para adaptar su configuración a la forma de los perfiles (10) que deben ser soportados,
caracterizado porque comprende las etapas de:
e) la adquisición de una información de vídeo acerca de la forma de dichos perfiles (10) transportados a lo largo de dicha unidad (110) de alimentación;
f) la generación de una señal eléctrica (20) dependiendo de dicha información adquirida, el procesamiento de dicha señal eléctrica (20) para determinar la forma de dichos perfiles (10) transportados por dicha unidad
(110) de alimentación, la generación de una señal procesada (22) que indica la forma de dichos perfiles (10) y el envío de dicha señal procesada (22) hasta dichos medios (154) de ajuste;
g) el ajuste de dichos medios (152) de soporte dependiendo de dicha señal procesada (22) para que dichos 20 perfiles (10) sean soportados de manera estable por dichos medios (152) de soporte durante dichas operaciones de maquinizar.
9. El procedimiento de acuerdo con la Reivindicación 8, en el cual dicha etapa de adquisición e) se lleva a cabo corriente abajo de la zona (112) de entrada de la unidad (110) de alimentación.
10. El procedimiento de acuerdo con las Reivindicaciones 8 o 9, en el cual dicha etapa de adquisición e) se lleva a 25 cabo en la zona (114) de salida de la unidad (110) de alimentación.
11. El procedimiento de acuerdo con una cualquiera de las Reivindicaciones 8 a 10, que comprende así mismo la etapa adicional h) de desplazamiento de dichos perfiles (10) desde dicha unidad (110) de alimentación hacia dicha unidad (15) de maquinizar por medio de una unidad (130) de transporte que comprende unos segundos medios
(132) de desplazamiento.
Patentes similares o relacionadas:
Máquina herramienta y procedimiento para medir una pieza de trabajo, del 29 de Abril de 2020, de FRITZ STUDER AG: Máquina herramienta, en particular una rectificadora, que comprende lo siguiente: - un asiento de pieza de trabajos con al menos una sujeción de pieza de […]
 Instalación de mecanizado y procedimiento asociado, del 31 de Julio de 2019, de Centre Technique des Industries Mécaniques et du Décolletage: Instalación de mecanizado, que comprende:
- una máquina herramienta con control digital,
- una unidad de alimentación […]
Instalación de mecanizado y procedimiento asociado, del 31 de Julio de 2019, de Centre Technique des Industries Mécaniques et du Décolletage: Instalación de mecanizado, que comprende:
- una máquina herramienta con control digital,
- una unidad de alimentación […]
 Método y aparato para determinar la profundidad de un orificio, del 31 de Mayo de 2019, de Airbus Operations Limited: Un metodo para determinar una longitud de un componente que se situara en un orificio mecanizado , que comprende las etapas de:
usar una maquina para […]
Método y aparato para determinar la profundidad de un orificio, del 31 de Mayo de 2019, de Airbus Operations Limited: Un metodo para determinar una longitud de un componente que se situara en un orificio mecanizado , que comprende las etapas de:
usar una maquina para […]
MÉTODO Y SISTEMA DE MANUFACTURA DE ESTRUCTURA DE TRANSICIÓN DE ETAPA PARA TURBINA AEROESPACIAL UTILIZANDO METROLOGÍA MULTISENSOR EN LÍNEA, del 28 de Junio de 2018, de BALLESTEROS SANTA CRUZ, Norman: Descripción técnica: Método de manufactura de componenetes estructurales de turbina aeroespacial conformado por la combinación de procesos, materiales, herramentales, […]
CABEZAL DE MÁQUINA HERRAMIENTA CON DISPOSITIVO DE MEDIDA, del 30 de Noviembre de 2017, de ZAYER, S.A.: Cabezal de máquina herramienta con dispositivo de medida para medir el espesor de una pieza a mecanizar con una herramienta, que comprende un primer sensor […]
Dispositivo de mecanizado y procedimiento de mecanizado para mecanizar piezas de trabajo con forma de placa, del 21 de Diciembre de 2016, de HOMAG GmbH: Dispositivo de mecanizado para el mecanizado de piezas de trabajo con forma de placa, que están compuestas preferiblemente, al menos por segmentos, de […]
Dispositivo de procesamiento con un dispositivo de detección y un dispositivo de ajuste, del 12 de Octubre de 2016, de HOMAG GmbH: Dispositivo de procesamiento para una pieza de trabajo, en el que la pieza de trabajo está hecha preferiblemente, al menos parcialmente, de madera, derivados […]
Máquina herramienta y procedimiento de medición de una pieza de trabajo, del 25 de Mayo de 2016, de FRITZ STUDER AG: Máquina herramienta, en particular rectificadora, comprendiendo los elementos siguientes: - un alojamiento de pieza de trabajo que […]