VEHÍCULO ELÉCTRICO Y DISPOSITIVO Y PROCEDIMIENTO PARA CONTROLAR SU DERRAPE.
Dispositivo de control de derrape de un vehículo eléctrico que tiene un par de motores izquierdo y derecho (7,
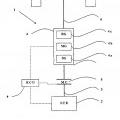
9) para accionar independientemente las ruedas izquierda y derecha (3L, 3R) del vehículo, comprendiendo dicho dispositivo de control de derrape: un medio de control de directiva de par (23) para calcular las directivas de par (38, 40) para los motores (7, 9) basándose respectivamente en las depresiones (24) del pedal de aceleración y los ángulos de virado y proporcionarlas a cada una de las secciones (21, 22) de control de motor de los motores (7, 9), un primer medio de cálculo de velocidad de referencia (46, 48) para calcular una primera velocidad de referencia de uno del par de motores izquierdo y derecho (7, 9) a controlar basándose en una velocidad de rotación del otro motor del par de motores (7, 9), y un medio de establecimiento de limitación (20) para determinar un intervalo de velocidad admisible para cada uno de los motores (7, 9) estableciendo una desviación de velocidad prescrita para cada una de las velocidades de referencia calculadas y establecer una limitación para cada una de las directivas de par (38, 40) enviadas por el medio de control de directiva de par (23) basándose en el intervalo de velocidades admisibles determinado por cada uno de los motores (7, 9)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07118697.
B60K28/16TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60VEHICULOS EN GENERAL. › B60KDISPOSICIONES O MONTAJE DE CONJUNTOS DE PROPULSION O DE TRANSMISIONES SOBRE VEHICULOS; DISPOSICIONES O MONTAJE DE VARIOS MOTORES PRINCIPALES DIFERENTES EN VEHÍCULOS; ACCIONAMIENTOS AUXILIARES PARA VEHICULOS; INSTRUMENTACION O TABLEROS DE A BORDO DE VEHICULOS; DISPOSICIONES DE CONJUNTOS DE PROPULSION SOBRE VEHICULOS, RELATIVAS A LA REFRIGERACION, A LA ADMISION DE AIRE, AL ESCAPE DE GASES O A LA ALIMENTACION DE CARBURANTE. › B60K 28/00 Dispositivos de seguridad para el control de la unidad de propulsión, especialmente adaptados para o dispuestos en vehículos, p. ej. que impiden el suministro de combustible o el encendido en caso de condiciones potencialmente peligrosas (para vehículos propulsados eléctricamente B60L 3/00; sistemas para control de la conducción del vehículo para fines no relacionados con el control de una subunidad particular B60W 30/00; sistemas de control d la conducción especialmente adaptados para vehículos terrestres autónomos B60W 60/00). › que responden o previenen el derrape o patinado de las ruedas (sistemas de control del frenado para la estabilidad del vehículo B60T 8/1755; dispositivos que regulan la fuerza de frenado sobre la rueda según una condición de velocidad B60T 8/32; control de la estabilidad del vehículo por otros medios distintos al control de la unidad propulsora únicamente B60W 30/02; prevención del patinado reduciendo la fuerza motriz en vehículos de raíl B61C 15/12).
B60L11/00
B60L15/20D
B60L3/10B
Clasificación PCT:
B60K28/16B60K 28/00 […] › que responden o previenen el derrape o patinado de las ruedas (sistemas de control del frenado para la estabilidad del vehículo B60T 8/1755; dispositivos que regulan la fuerza de frenado sobre la rueda según una condición de velocidad B60T 8/32; control de la estabilidad del vehículo por otros medios distintos al control de la unidad propulsora únicamente B60W 30/02; prevención del patinado reduciendo la fuerza motriz en vehículos de raíl B61C 15/12).
B60K7/00B60K […] › Disposición del motor en la rueda motriz o adyacente a ella (mecanismos motores propulsando carretillas de patines A63C 17/12).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Vehículo eléctrico y dispositivo y procedimiento para controlar su derrape Antecedentes de la invención Campo de la invención La presente invención se refiere a un dispositivo de control de derrape para suprimir la existencia de derrape de las ruedas motrices, un procedimiento de control de derrape, y un vehículo eléctrico que lleva instalado el dispositivo de control, teniendo el vehículo eléctrico un par de ruedas derechas e izquierdas accionadas independientemente por respectivamente un motor eléctrico. Descripción de la técnica relacionada En un vehículo accionado por un motor, las ruedas motrices derecha e izquierda están conectadas por un diferencial y están compuestas de tal manera que no ocurran situaciones como en las que se reduce la carga sobre la rueda de un lado o se desliza sola. Sin embargo, en los últimos años, imperan los vehículos eléctricos ligeros y de gran rendimiento con motor eléctrico individual fijado a cada rueda motriz. Existe un problema en estos vehículos eléctricos que, puesto que las ruedas derecha e izquierda son accionadas independientemente, cuando la carga sobre la rueda de un lado se reduce o el coeficiente de fricción de la rueda de un lado se reduce, solamente la rueda de un lado derrapa o tiende a bloquearse. Se han propuesto varias medidas para solucionar este problema. Por ejemplo, la solicitud de patente japonesa abierta a inspección pública nº 2006-136142 (bibliografía de patentes 1) divulga una técnica con la cual, cuando se detecta la condición de desplazamiento en la cual va probablemente a ocurrir un derrape basándose en la relación de derrape calculada a partir de la velocidad del vehículo y la velocidad circunferencial de la rueda, se usa la velocidad de rotación del primer retardo obtenida llevando a cabo un procesamiento del primer retardo a la velocidad de rotación detectada como velocidad de rotación del motor de inducción con el fin de suprimir la existencia de derrape de la rueda accionada por el motor de inducción. La solicitud de patente japonesa abierta a inspección pública nº 2000-209705 (bibliografía de patentes 2) divulga un sistema de vehículo automático guiado para transportar cargas, etc., a un destino por accionamiento automático sobre un tranvía. El vehículo va provisto de un dispositivo maestro de desplazamiento para accionar las ruedas motrices maestras y un dispositivo esclavo de desplazamiento para accionar las ruedas motrices esclavas entre las ruedas motrices maestras accionadas bajo la directiva de par procedente del dispositivo maestro de desplazamiento y las ruedas motrices esclavas accionadas bajo la directiva de par procedente del dispositivo de desplazamiento esclavo. Asimismo, la solicitud de patente japonesa abierta a inspección pública nº 2006-166572 (bibliografía de patente 3) divulga un dispositivo de control para suprimir el derrape de un vehículo eléctrico. El control es llevado a cabo de manera que se considera un derrape según si un valor derivado de la diferencia entre la velocidad circunferencial de una rueda individual y la media de velocidades circunferenciales de todas las ruedas sobrepasa un valor de referencia o no, y cuando se considera que se ha producido un derrape, se reduce el par motor bien de la rueda en derrape o de la rueda acoplada de la misma. Sin embargo, con el procedimiento depara controlar la existencia de derrape según la bibliografía de patente 1, cuando se detecta un derrape, la primera frecuencia de orden se incrementa gradualmente permitiendo que pase un primer filtro de retardo, de manera que el derrape inicial se pueda limitar, pero cuando el derrape empieza es difícil controlar la velocidad de rotación de la rueda una vez que se produce el derrape. Con la técnica divulgada en la bibliografía de patente 2, el control de par se lleva a cabo basándose en la diferencia de velocidad de rotación entre las ruedas motrices maestras y las ruedas motrices esclavas. Por lo tanto, no se puede aplicar al control de derrape de las ruedas izquierda y derecha teniendo en cuenta la diferencia entre las velocidades de rotación de las ruedas izquierda y derecha cuando el vehículo está girando. Con el dispositivo de control según la bibliografía de patente 3, se lleva a cabo el control considerando la existencia de derrape basándose en un valor derivado de la diferencia entre la velocidad circunferencial de una rueda individual y la media de las velocidades circunferenciales de todas las ruedas, se puede considerar y limitar adecuadamente el derrape inicial. Sin embargo es difícil controlar la velocidad de rotación de la rueda una vez producido el derrape. Como se ha mencionado anteriormente, existen problemas en un vehículo eléctrico con los motores fijados a las ruedas individuales de que solamente la rueda de un lado derrape o tienda a bloquearse. Se han propuestos varios 2 E07118697 26-10-2011 dispositivos de control de supresión de derrape para vehículos eléctricos con motores individuales para accionar cada rueda, sin embargo, un dispositivo de control de derrape para suprimir la existencia de derrape con el cual el vehículo se desplaza de manera estable manteniendo una buena sujeción en carretera incluso cuando se desplaza sobre una carretera donde es fácil que se produzca un derrape. El documento US2005/072608 A1 divulga un vehículo con cuatro ruedas accionadas respectivamente por un motor eléctrico. El vehículo incorpora un control de límite de derrape con el cual las cuatro velocidades del motor son promediadas y comparadas con cada velocidad individual. Si una velocidad individual sobrepasa un límite prescrito, se reduce el control de esta transmisión para evitar que la rueda sobrepase ese límite, controlando de este modo el derrape de la rueda. Los límites permitidos se modifican con el ángulo de virado y la velocidad global. La entrada de ángulo de virado da información al sistema, de manera que, durante una curva, se permite que las ruedas exteriores vayan más deprisa que la rueda interiores. Puesto que la velocidad global del vehículo aumenta, el control de derrape se relaja para permitir una diferencia de velocidad de rueda debido al desgaste de las cubiertas. Sumario de la invención La presente invención se ha llevado a cabo a la luz de los antecedentes mencionados anteriormente, y el objeto es proporcionar un dispositivo de control de derrape, un procedimiento de control y un vehículo provisto de tal dispositivo de control de derrape, con el cual el vehículo se puede desplazar de manera estable incluso sobre una superficie de carretera resbaladiza manteniendo un buen mantenimiento en carretera. Para conseguir este objetivo, la invención propone un dispositivo de control de derrape tal como se define en la reivindicación 1, y un procedimiento de control de derrape tal como se define en la reivindicación 6. Se definen realizaciones preferidas en las reivindicaciones dependientes. Especialmente, la invención propone un dispositivo de control de derrape de un vehículo eléctrico que tiene un par de motores izquierdo y derecho para accionar una rueda izquierda y derecha del vehículo de manera independiente, en el cual se disponen un medio de control de directiva de par para calcular las directivas de par para los motores basándose respectivamente en las depresiones del pedal de aceleración y los ángulos de virado y proporcionarlas a cada una de las secciones de control de motor de los motores un primer medio de cálculo de velocidad de referencia para calcular la primera velocidad de referencia de uno del par de motores izquierdo y derecho a controlar basándose en la velocidad de rotación del otro motor del par de motores, y un medio de establecimiento de limitación para determinar un intervalo de velocidad admisible para cada uno de los motores estableciendo una desviación de velocidad prescrita para cada una de las velocidades de referencia calculadas y establecer una limitación para cada una de las directivas de par enviadas por el medio de control de directiva de par basándose en el intervalo de velocidades admisibles determinado por cada uno de los motores. Según la invención, la velocidad de referencia se calcula por el primer medio de cálculo de velocidad de referencia que calcula la velocidad de referencia de un motor a controlar del par de motores basándose e la velocidad de rotación del otro motor del par de motores, y se establece otra limitación mediante le medio de establecimiento de limitación estableciendo una desviación de velocidad admisible a la velocidad de referencia para obtener un intervalo de velocidad admisible para cada uno de los motores, de este modo se evita que la diferencia de velocidad entre la velocidad de un motor del par de motores y la del otro motor del par de motores aumente por encima del intervalo de velocidad admisible. En consecuencia, se evita la existencia... [Seguir leyendo]
Reivindicaciones:
1.- Dispositivo de control de derrape de un vehículo eléctrico que tiene un par de motores izquierdo y derecho (7, 9) para accionar independientemente las ruedas izquierda y derecha (3L, 3R) del vehículo, comprendiendo dicho dispositivo de control de derrape: un medio de control de directiva de par (23) para calcular las directivas de par (38, 40) para los motores (7, 9) basándose respectivamente en las depresiones (24) del pedal de aceleración y los ángulos de virado y proporcionarlas a cada una de las secciones (21, 22) de control de motor de los motores (7, 9), un primer medio de cálculo de velocidad de referencia (46, 48) para calcular una primera velocidad de referencia de uno del par de motores izquierdo y derecho (7, 9) a controlar basándose en una velocidad de rotación del otro motor del par de motores (7, 9), y un medio de establecimiento de limitación (20) para determinar un intervalo de velocidad admisible para cada uno de los motores (7, 9) estableciendo una desviación de velocidad prescrita para cada una de las velocidades de referencia calculadas y establecer una limitación para cada una de las directivas de par (38, 40) enviadas por el medio de control de directiva de par (23) basándose en el intervalo de velocidades admisibles determinado por cada uno de los motores (7, 9). 2.- Dispositivo de control de derrape según la reivindicación 1, en el cual dicho primer medio de cálculo de velocidad de referencia (46, 48) está adaptado para calcular dicha velocidad de referencia de un motor del par de motores (7, 9) multiplicando la velocidad del otro motor del par de motores (7, 9) por un factor de virado obtenido a partir de una característica de medición de par prescrita para los motores izquierdo y derecho (7, 9) según los ángulos de virado. 3.- Dispositivo de control de derrape según la reivindicación 1 que comprende, además, un segundo medio de cálculo de velocidad de referencia (46, 50) para calcular una segunda velocidad de referencia del motor a controlar según un ángulo de virado detectado por un medio de detección de ángulo de virado (19), y un medio de cálculo de velocidad de referencia final (55) para calcular una velocidad de referencia final aplicando relaciones de adopción que determinan relaciones de adopción de la primera y segunda velocidad de referencia calculadas por el primer y el segundo medio de cálculo (46, 48, 50) respectivamente según ángulos de virado. 4.- Dispositivo de control de derrape según la reivindicación 3, en el cual la velocidad de referencia se calcula solamente por el segundo medio de cálculo de velocidad (46, 50) cuando el vehículo toma una curva corta con un ángulo de virado superior a un valor prescrito. 5.- Dispositivo de control de derrape según la reivindicación 3, en el cual dicho segundo medio de cálculo de velocidad de referencia (46, 50) está provisto de una sección de corrección de la posición del operador (C) para convertir su resultado de cálculo en una velocidad que corresponde a la de la posición del operador (P) dividiendo el resultado de cálculo por un factor de conversión de la posición del operador (M) según los ángulos de virado. 6.- Procedimiento de control de derrape de un vehículo eléctrico que tiene un par de motores izquierdo y derecho (7, 9) para accionar independientemente las ruedas izquierda y derecha (3L, 3R) del vehículo, en el cual las directivas de par (38, 40) para cada uno de los motores (7, 9) se calculan basándose en las depresiones del pedal de aceleración (24) y los ángulos de virado, y las directivas de par (38, 40) son proporcionadas a cada una de las secciones de control de motor (21, 22) de los motores (7, 9), una velocidad de referencia del par de motores izquierdo y derecho (7, 9) a controlar se calcula basándose en la velocidad de rotación del otro motor del par de motores (7, 9), y se establece una limitación para las directivas de par (38, 40) basándose en un intervalo de velocidades admisibles determinado estableciendo una desviación de velocidad prescrita a cada una de las velocidades de referencia. 7.- Procedimiento de control de derrape de un vehículo eléctrico según la reivindicación 6, en el cual una segunda velocidad de referencia de un motor a controlar es calculada basándose en un ángulo de virado detectado por un medio de detección de ángulo de virado (19), y la velocidad de referencia final se calculada usando relaciones de adopción prescritas para atribuir dicha velocidad de referencia y dicha segunda velocidad de referencia según los ángulos de virado. 8.- Vehículo eléctrico proporcionado con el dispositivo de control de derrape según cualquiera de las reivindicaciones 1-5 11 E07118697 26-10-2011 12 E07118697 26-10-2011 13 E07118697 26-10-2011 14 E07118697 26-10-2011 E07118697 26-10-2011 16 E07118697 26-10-2011 17 E07118697 26-10-2011 18 E07118697 26-10-2011 19 E07118697 26-10-2011
Patentes similares o relacionadas:
Procedimiento y disposición para monitorizar el estado de conducción de un vehículo y vehículo con una disposición de este tipo, del 15 de Abril de 2020, de Siemens Mobility GmbH: Procedimiento para monitorizar el estado de conducción de un vehículo, en particular de un vehículo ferroviario, en el que se capta una señal de número de revoluciones […]
Motocicleta, del 4 de Marzo de 2020, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Una motocicleta con una fuente de potencia de accionamiento , una sección de control de fuente de potencia de accionamiento (22d, 220d), una rueda delantera […]
Vehículo incluyendo un dispositivo de control de tracción, del 8 de Mayo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un vehículo incluyendo:
un motor incluyendo un dispositivo de encendido , un dispositivo de inyección de combustible , y una válvula de mariposa electrónicamente […]
Sistema de control de potencia de accionamiento y vehículo equipado con un sistema de control de potencia de accionamiento, del 13 de Marzo de 2019, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Un sistema de control de fuerza de accionamiento para uso en un vehículo, incluyendo el vehículo una fuente de accionamiento , una rueda motriz a mover por […]
Sistema de tracción y un método para controlar dicho sistema de tracción, del 6 de Julio de 2016, de VOLVO LASTVAGNAR AB: Un método para controlar un sistema de tracción para un vehículo de carretera pesado, comprendiendo dicho sistema de tracción :
- un primer el sistema de propulsión […]
Procedimiento y sistema para controlar un grupo motopropulsor de un vehículo, del 2 de Julio de 2014, de VOLVO LASTVAGNAR AB: Un sistema de grupo motopropulsor para un vehículo que comprende un embrague principal automático , una caja de cambios escalonada y una unidad […]
Sistema y método para controlar la tracción en un vehículo de dos ruedas, del 20 de Marzo de 2013, de PIAGGIO & C. S.P.A.: Método para el control de la tracción en un vehículo de dos ruedas que comprende un motor controlado porpar y una pluralidad de […]
Motocicleta, del 14 de Marzo de 2012, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Una motocicleta que comprende:
una fuente motriz (10a);
una rueda accionada por la fuente motriz (10a);
una rueda accionada ; y
caracterizada por;
una […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 Procedimiento y sistema para controlar un grupo motopropulsor de un vehículo, del 2 de Julio de 2014, de VOLVO LASTVAGNAR AB: Un sistema de grupo motopropulsor para un vehículo que comprende un embrague principal automático , una caja de cambios escalonada y una unidad […]
Procedimiento y sistema para controlar un grupo motopropulsor de un vehículo, del 2 de Julio de 2014, de VOLVO LASTVAGNAR AB: Un sistema de grupo motopropulsor para un vehículo que comprende un embrague principal automático , una caja de cambios escalonada y una unidad […] Sistema y método para controlar la tracción en un vehículo de dos ruedas, del 20 de Marzo de 2013, de PIAGGIO & C. S.P.A.: Método para el control de la tracción en un vehículo de dos ruedas que comprende un motor controlado porpar y una pluralidad de […]
Sistema y método para controlar la tracción en un vehículo de dos ruedas, del 20 de Marzo de 2013, de PIAGGIO & C. S.P.A.: Método para el control de la tracción en un vehículo de dos ruedas que comprende un motor controlado porpar y una pluralidad de […] Motocicleta, del 14 de Marzo de 2012, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Una motocicleta que comprende:
una fuente motriz (10a);
una rueda accionada por la fuente motriz (10a);
una rueda accionada ; y
caracterizada por;
una […]
Motocicleta, del 14 de Marzo de 2012, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Una motocicleta que comprende:
una fuente motriz (10a);
una rueda accionada por la fuente motriz (10a);
una rueda accionada ; y
caracterizada por;
una […]