SISTEMA Y MÉTODO PARA ESTIMAR LA DISTANCIA DE UN TIRADOR.
Un método para estimar la distancia de un tirador detectando una onda de choque y una detonación del cañón,
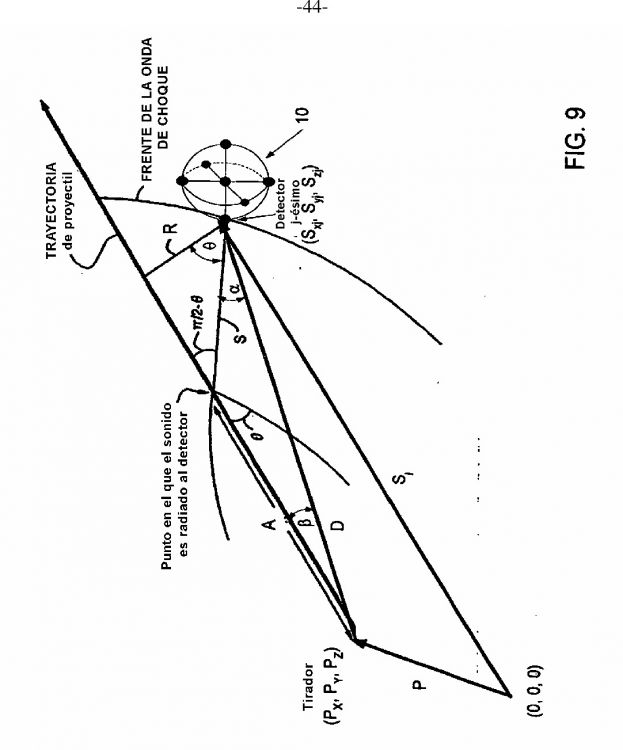
que comprende: medir señales solamente de onda de choque, en una serie de detectores acústicos separados que forman una antena; medir una señal de la detonación del cañón, en la serie de detectores acústicos; a partir de las señales medidas de la onda de choque y de la detonación del cañón, determinar una estimación inicial de la distancia del tirador (204), suponer una velocidad inicial de la bala y un coeficiente de resistencia de la bala (206); y calcular iterativamente una velocidad instantánea de la bala en un punto sobre una trayectoria de la bala, para obtener una distancia actualizada (208, 210) del tirador
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08004009.
Solicitante: BBN TECHNOLOGIES CORP.
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 10 MOULTON STREET CAMBRIDGE, MA 02138 ESTADOS UNIDOS DE AMERICA.
Inventor/es: MILLIGAN,STEPHEN,D, BARGER,JAMES, BRINN,SETH MARSHALL, MULLEN,RICHARD.
Fecha de Publicación: .
Fecha Solicitud PCT: 24 de Agosto de 2005.
Fecha Concesión Europea: 6 de Octubre de 2010.
Clasificación Internacional de Patentes:
- F41J5/06 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F41 ARMAS. › F41J BLANCOS O DIANAS; CAMPOS DE TIRO; COLECTORES DE BALAS. › F41J 5/00 Sistemas indicadores para el tiro al blanco; Sistemas detectores de blancos acertados o indicadores de puntuación. › Sistemas acústicos indicadores de blancos acertados, es decir, que detectan las ondas de choque (F41J 5/056 tiene prioridad).
- G01S3/808 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 3/00 Localizadores de dirección para la determinación de la dirección desde la que se reciben ondas infrasonoras, sonoras, ultrasonoras o electromagnéticas o emisiones de partículas, que no tienen contenido direccional significativo (establecimiento de la posición mediante la coordinación de una pluralidad de determinaciones de dirección o de líneas de posición G01S 5/00). › que utilizan transductores distanciados entre sí y miden la diferencia de fase o de tiempo entre las señales que provienen de ellos, p. ej. sistemas basados en la diferencia de caminos.
- G01S5/22 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › La posición de la fuente se determina mediante la coordinación de una pluralidad de líneas de posición definidas mediante medidas relacionadas con la diferencia de caminos (G01S 5/28 tiene prioridad).
Clasificación PCT:
- F41J5/06 F41J 5/00 […] › Sistemas acústicos indicadores de blancos acertados, es decir, que detectan las ondas de choque (F41J 5/056 tiene prioridad).
- G01S3/808 G01S 3/00 […] › que utilizan transductores distanciados entre sí y miden la diferencia de fase o de tiempo entre las señales que provienen de ellos, p. ej. sistemas basados en la diferencia de caminos.
- G01S5/22 G01S 5/00 […] › La posición de la fuente se determina mediante la coordinación de una pluralidad de líneas de posición definidas mediante medidas relacionadas con la diferencia de caminos (G01S 5/28 tiene prioridad).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
Fragmento de la descripción:
Campo de la Invención
La presente invención se refiere a seguridad y a tecnologías para las fuerzas y cuerpos de seguridad, y más en concreto a métodos y sistemas para determinar el origen y la dirección de desplazamiento de proyectiles supersónicos. Los métodos y sistemas son capaces de determinar, y desambiguar las posiciones del tirador incluso para grandes distancias entre el tirador y el detector, y cuando no se recibe señal o se recibe solamente una señal débil procedente del sonido del cañón. Antecedentes de la Invención
Se conocen sistemas y métodos que determinan aproximadamente la dirección y la trayectoria de proyectiles supersónicos, tales como balas y proyectiles de artillería, midiendo parámetros asociados con la onda de choque generada por un proyectil. Uno de dichos sistemas, descrito en la patente de EE.UU. número 5 241 518, incluye por lo menos tres detectores separados espacialmente, incorporando cada detector tres transductores acústicos dispuestos en un plano. Los detectores generan señales en respuesta a la onda de choque, que están relacionadas con el acimut y el ángulo de elevación respecto del origen de la onda de choque. Las mediciones solamente de onda de choque, no pueden determinar la distancia entre el detector o los detectores, y el origen de la onda de choque. Habitualmente, se obtiene información de la distancia a partir del fogonazo del cañón o de la detonación del cañón.
El acimut y el ángulo de elevación de un tirador, en relación con la posición del detector, son determinados típicamente midiendo información del instante de llegada (TOA, Time-of-Arrival) de la señal del cañón y la señal de la onda de choque, en cada detector. Cada uno de los detectores se encuentra con las señales en un instante diferente, y genera una señal en respuesta a la presión del cañón y de la onda de choque. Se procesan las señales procedentes de los diversos detectores, y puede determinarse una dirección (acimut y elevación) desde el detector o los detectores hasta el origen del cañón y la onda de choque, y determinarse por lo tanto la trayectoria del proyectil.
Los sistemas convencionales utilizan micrófonos, que pueden estar poco separados (por ejemplo, separados a 1 m) o ampliamente dispersos (por ejemplo, montados en un vehículo o llevados por soldados en un campo de batalla), y miden de forma omnidireccional la presión del cañón y de la onda de choque, en sus posiciones respectivas. Sin embargo, salvo que los detectores estén separados de forma relativamente amplia y/o que la trayectoria quede dentro de la antena, la precisión de sincronización necesaria para obtener soluciones precisas solamente con onda de choque es muy elevada, y se requieren técnicas especiales.
Un tamaño de antena grande puede ser un inconveniente serio, por ejemplo, en sistemas montados en vehículos. Además, los sistemas con resolución temporal solamente marginal pueden generar soluciones ambiguas, en las que la información del instante de llegada de la onda de choque en un conjunto dado de detectores, es casi idéntica para dos posiciones de tirador en simetría especular.
Los algoritmos convencionales necesitan por lo menos 4 detecciones de la onda de choque y del cañón, de manera que pueda invertirse una matriz de 4 × 4 para mapear una onda plana sobre el TOA de la onda plana. Errores pequeños en la determinación del TOA del choque y del cañón, pueden producir errores considerables en las estimaciones de la distancia. Además, los algoritmos convencionales asumen una velocidad constante de la bala, a lo largo de la trayectoria de la bala, que proporciona estimaciones imprecisas de la distancia para disparos de largo alcance, disparados desde una distancia mayor de unos 300 m.
Por consiguiente, existe la necesidad de algoritmos rápidamente convergentes que puedan estimar con precisión la distancia de un tirador lejano. Existe también la necesidad de desambiguación en soluciones solamente con onda de choque, para la dirección del tirador. Existe además la necesidad de extraer señales del cañón que pueden estar oscurecidas por signaturas acústicas no relacionadas con la detonación del cañón. Resumen de la Invención
La invención soluciona las deficiencias de la técnica anterior mediante proporcionar métodos y sistemas, en varias realizaciones, para estimar la distancia del tirador para disparos de largo alcance, en concreto, cuando las señales del cañón son débiles o bien se detectan en un número insuficiente de canales de detección. Los métodos y sistemas dados a conocer mejoran asimismo la desambiguación de soluciones de la trayectoria del tirador, solamente con onda de choque, consiguiéndose mejoras adicionales al incluir sonidos del cañón detectados de forma débil y/o no fiable, en el proceso de optimización.
La invención está definida por las reivindicaciones anexas.
Según un aspecto de la invención, un método para la desambiguación de la trayectoria de un proyectil a partir de señales solamente de onda de choque, incluye las etapas de medir, por lo menos, una parte inicial de las señales solamente de onda de choque, en cinco o más detectores acústicos separados que forman una antena, estimar una distribución de error de sincronización para los detectores acústicos, a partir de la parte inicial medida de las señales solamente de onda de choque, determinar las diferencias entre instantes de llegada (TDOA, Time-Differences-Of-Arrival) para pares de detectores, con una resolución temporal que es mayor que la distribución de errores de sincronización estimados, y seleccionar la trayectoria desambiguada del proyectil en función de un nivel de confianza definido para la desambiguación, y de un valor de un residuo para las TDOA de los detectores acústicos.
Según otro aspecto de la invención, un método para la desambiguación de la trayectoria de un proyectil a partir de señales solamente de onda de choque, incluye las etapas de medir, por lo menos, una parte inicial de las señales de ondas de choque en cinco o más detectores acústicos separados que forman una antena, determinar desde la parte inicial medida de las señales solamente de onda de choque, diferencias entre instantes de llegada (TDOA) para pares de detectores, aplicar un algoritmo genético a un cromosoma inicial, que comprende hipótesis de la trayectoria del proyectil, durante un número predefinido de generaciones, calcular residuos para soluciones obtenidas con cromosomas a partir del algoritmo genético, llevar a cabo una búsqueda de gradiente sobre una solución con el residuo mínimo y sobre su solución alternativa ambigua, y si la relación entre la solución que tiene el residuo mínimo y su solución alternativa ambigua es mayor de un valor predefinido, designar la solución con el residuo mínimo como la trayectoria desambiguada del proyectil.
Según otro aspecto de la invención, en un método para estimar la distancia de un tirador detectando la onda de choque y la detonación del cañón, se miden señales solamente de la onda de choque, así como señales de la detonación del cañón. Se estima una distancia inicial del tirador a partir de las señales medidas de onda de choque y de detonación del cañón, asumiendo una velocidad inicial de la bala y un coeficiente de resistencia de la bala. Se calcula de forma iterativa la velocidad instantánea de la bala a lo largo de una trayectoria de la bala, para obtener una distancia actualizada del tirador. El número de canales de detección de la detonación del cañón, es usualmente menor que el número de canales de detección de la onda de choque.
Las realizaciones ventajosas pueden incluir o una o más de las siguientes características. Se calcula una diferencia entre instantes de llegada (TDOA) entre las señales solamente de onda de choque y las señales de detonación del cañón, y un ángulo de llegada, para determinar la distancia inicial del tirador. Puede llevarse a cabo cierto número de iteraciones, o bien se considerará que la distancia actualizada del tirador es la distancia final del tirador, si la relación entre distancias actualizadas del tirador determinadas sucesivamente satisface el criterio de convergencia. Por ejemplo, puede seleccionarse el criterio de convergencia de manera que la diferencia entre las distancias actualizadas del tirador determinadas sucesivamente, o un cambio porcentual entre las distancias actualizadas del tirador determinadas sucesivamente, sea menor de un valor predeterminado. Para obtener soluciones reales, se determina que la velocidad calculada de la bala sea siempre...
Reivindicaciones:
1. Un método para estimar la distancia de un tirador detectando una onda de choque y una detonación del cañón, que comprende:
medir señales solamente de onda de choque, en una serie de detectores
acústicos separados que forman una antena;
medir una señal de la detonación del cañón, en la serie de detectores
acústicos;
a partir de las señales medidas de la onda de choque y de la detonación del
cañón, determinar una estimación inicial de la distancia del tirador (204),
suponer una velocidad inicial de la bala y un coeficiente de resistencia de la
bala (206); y
calcular iterativamente una velocidad instantánea de la bala en un punto sobre
una trayectoria de la bala, para obtener una distancia actualizada (208, 210)
del tirador.
2. El método de la reivindicación 1, en el que calcular iterativamente comprende llevar a cabo un número predeterminado de iteraciones.
3. El método de la reivindicación 1, en el que determinar la distancia inicial del tirador incluye calcular una diferencia entre instantes de llegada (TDOA), entre las señales solamente de onda de choque y las señales de detonación del cañón, y un ángulo de llegada.
4. El método de la reivindicación 1, en el que calcular iterativamente comprende definir un criterio de convergencia y aceptar la distancia actualizada del tirador como la distancia final del tirador, si una relación entre distancias actualizadas del tirador determinadas sucesivamente, satisface el criterio de convergencia.
5. El método de la reivindicación 4, en el que la relación entre distancias actualizadas del tirador determinadas sucesivamente, es una diferencia entre las distancias actualizadas del tirador determinadas sucesivamente.
6. El método de la reivindicación 4, en el que la relación entre distancias actualizadas del tirador determinadas sucesivamente, es una variación porcentual entre las distancias actualizadas del tirador determinadas sucesivamente.
7. El método de la reivindicación 1, en el que la velocidad calculada de la bala se ajusta a la velocidad del sonido, si la velocidad calculada de la bala es menor que la velocidad del sonido.
8. El método de la reivindicación 1, en el que la distancia actualizada del tirador se considera inválida si un ángulo de la trayectoria de la bala y un ángulo de llegada son mayores que un valor predeterminado.
9. El método de la reivindicación 8, que incluye además, si la distancia actualizada del tirador no es válida, aplicar un algoritmo genético (GA) mediante:
definir una población inicial del GA, teniendo la población un número
predeterminado de individuos, estando cada individuo representado o por una
3-tupla que incluye un distancia supuesta del tirador, un acimut fallado (MA)
y una elevación fallada (ME) de la trayectoria de la bala;
llevar a cabo el GA para un número predefinido de generaciones;
calcular residuos para los individuos en cada generación; y
en cada generación, seleccionar la solución con el residuo más pequeño,
como el individuo que sobrevive sin mutación.
10. El método de la reivindicación 9, y que incluye además la etapa de seleccionar, después de que se han realizado un número predefinido de generaciones, la solución con el residuo más pequeño como la distancia actualizada del tirador.
11. El método de la reivindicación 9, que comprende además, para cada 3tupla en una generación, llevar a cabo un número predeterminado de iteraciones para calcular una distancia revisada del tirador, en el que los residuos para los individuos en cada generación se calculan con la distancia revisada del tirador.
12. El método de la reivindicación 9, en el que aplicar el GA comprende aplicar operadores de cruce y mutación, a la población de una generación.
13. El método de la reivindicación 12, en el que aplicar el operador de cruce incluye intercambiar por lo menos un acimut fallado y una elevación fallada, entre dos individuos de la población de una generación.
14. El método de la reivindicación 12, en el que el operador de mutación comprende mutación de campo, mutación incremental, y no mutación.
15. El método de la reivindicación 14, en el que el operador de mutación de campo sustituye un valor de la 3-tupla, con un valor seleccionado aleatoriamente.
16. El método de la reivindicación 14, en el que el operador de mutación
incremental induce una pequeña mutación en todos los campos de la 3-tupla. 17. El método de la reivindicación 14, en el que el operador de no mutación deja inalterados a los individuos de una generación. 18. Un sistema para estimar la distancia de un tirador detectando una onda de
5 choque y una detonación del cañón, que comprende: una serie de detectores acústicos separados (22-28) que forman una antena, para medir señales solamente de onda de choque; medios para medir una señal de detonación del cañón, en la serie de detectores acústicos (22-28); medios que determinan, a partir de las señales medidas de la onda de choque y de la detonación del cañón, una estimación inicial de la distancia del tirador; y medios, basados en una velocidad inicial de la bala y en un coeficiente de resistencia de la bala, para calcular iterativamente una velocidad instantánea de la bala en un punto sobre la trayectoria de la bala, para obtener una distancia actualizada del tirador. Siguen once hojas de dibujos.
Patentes similares o relacionadas:
 Una cámara acústica y un método para revelar emisiones acústicas de varios lugares y dispositivos, del 24 de Junio de 2020, de Noiseless Acoustics Oy: Una cámara acústica, que comprende:
- una carcasa ;
- un conjunto de micrófonos configurados para recopilar información de sonido acústico y para […]
Una cámara acústica y un método para revelar emisiones acústicas de varios lugares y dispositivos, del 24 de Junio de 2020, de Noiseless Acoustics Oy: Una cámara acústica, que comprende:
- una carcasa ;
- un conjunto de micrófonos configurados para recopilar información de sonido acústico y para […]
Procedimiento y dispositivo para detectar cambios de rumbo y/o cambios de velocidad de un objetivo, del 12 de Febrero de 2014, de ATLAS ELEKTRONIK GMBH: Procedimiento para detectar cambios de rumbo y/o cambios de velocidad de un objetivo por medio de un gran número de ángulos de marcación medidos en diferentes momentos, que […]
 Procedimiento y dispositivo para la determinación pasiva de datos de un objetivo, del 9 de Abril de 2013, de ATLAS ELEKTRONIK GMBH: Procedimiento para la determinación pasiva de datos de un objetivo (R, K, V) asociados a un objetivo, enparticular una distancia del objetivo, un rumbo […]
Procedimiento y dispositivo para la determinación pasiva de datos de un objetivo, del 9 de Abril de 2013, de ATLAS ELEKTRONIK GMBH: Procedimiento para la determinación pasiva de datos de un objetivo (R, K, V) asociados a un objetivo, enparticular una distancia del objetivo, un rumbo […]
Procedimiento para generar rutas de localizador que jalonan la puntería, del 9 de Abril de 2013, de ATLAS ELEKTRONIK GMBH: Procedimiento para generar rutas de localización que jalonan la puntería, para varios objetivos que emiten ondassonoras, los cuales se localizan en una zona marítima, […]
Sistemas y métodos para desambiguar posiciones de un tirador, del 23 de Mayo de 2012, de Raytheon BBN Technologies Corp: Un método para determinar una trayectoria del proyectil no ambigua utilizando una matriz de sensores acústicosseparados cuando una […]
MÉTODO PARA IDENTIFICAR UN REBUFO, del 2 de Marzo de 2012, de Raytheon BBN Technologies Corp: Un método para identificar una señal de rebufo dentro de una señal generada por una matriz de sensores acústicos que forman una antena, que comprende: definir […]
PROCEDIMIENTO PARA LA LOCALIZACION PASIVA DE OBJETIVOS IRRADIADORES DE SONIDO., del 1 de Enero de 2006, de ATLAS ELEKTRONIK GMBH: Procedimiento para la localización pasiva de objetivos irradiadores de sonido mediante la determinación de un ángulo de marcación con respecto al objetivo y una distancia […]
PROCEDIMIENTO DE DETERMINACIÓN DE LA DIRECCIÓN PARA DETECTAR Y RASTREAR ÁNGULOS DE MARCACIÓN SUCESIVOS, del 30 de Enero de 2012, de ATLAS ELEKTRONIK GMBH: Procedimiento de determinación de la dirección para detectar y rastrear ángulos de marcación (Θ) sucesivos de objetivos emisores de sonido a través de todo el […]