SISTEMA DE FRENOS CONTROLADO ELECTRÓNICAMENTE.
Una unidad de control que consta de: un microordenador (60); en donde la unidad de control se aplica como una unidad de control electrónico para un sistema de control de frenos;
el sistema de control de frenos que incluye las fuentes de generación de la presión del fluido de frenos (16, 27) para generar una presión del fluido de frenos, los medios para generar la fuerza de freno de la rueda (11 a 14) para recibir una presión del fluido de frenos desde la fuente de generación de la presión del fluido de frenos para generar una fuerza de freno respectivamente a cada rueda, las tuberías proporcionadas entre la fuente de generación de la presión del fluido de frenos y los medios de generación de la fuerza de freno de la rueda, y una pluralidad de válvulas de control (21 a 24, 31 a 34) proporcionadas en las tuberías; y una pluralidad de válvulas de control (21 a 24, 31 a 34) se controlan respectivamente en base a un resultado de operación aritmética del microordenador (60) para la aplicación al control de la presión del fluido de frenos aplicada a los medios de generación de la fuerza de freno de la rueda (11 a 14); caracterizada porque la unidad de control además comprende un IC periférico (70), en donde el microordenador (60) se construye para transmitir los datos al IC periférico (70); el IC periférico (70) se construye para monitorizar un fallo del microordenador (60) en base a los datos recibidos desde el microordenador (60); en donde una señal que notifica un fallo al microordenador (60) se pone a la salida cuando una señal para aumentar la presión del fluido de frenos aplicada a los medios de generación de la fuerza de freno de la rueda (11 a 14) no se pone a la salida durante un periodo predeterminado de los datos recibidos por el IC periférico (70) bajo el estado de control antibloqueo de frenos o cuando, si tal señal se pone a la salida, esta señal se superpone en la señal para disminuir la presión del fluido de frenos aplicada a los medios de generación de la fuerza de frenado de la rueda (11 a 14)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E03017980.
Solicitante: DENSO CORPORATION.
Nacionalidad solicitante: Japón.
Dirección: 1-1, SHOWA-CHO KARIYA-CITY, AICHI-PREF. 448-8661 JAPON.
Inventor/es: KABUNE, HIDEKI, Kidokoro,Hiroyasu, Kumabe,Hajime.
Fecha de Publicación: .
Fecha Solicitud PCT: 18 de Abril de 2001.
Clasificación Internacional de Patentes:
- B60T8/88B
- G06F11/00B
- G06F11/08N
Clasificación PCT:
- B60T8/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60T SISTEMAS DE CONTROL DE FRENOS PARA VEHICULOS O PARTES DE ESOS SISTEMAS; SISTEMAS DE CONTROL DE FRENOS O PARTES DE ESOS SISTEMAS, EN GENERAL (control de sistemas de frenado electrodinámico B60L 7/00; control conjugado de frenos y otras unidades de accionamiento de vehículos B60W ); DISPOSICION DE ELEMENTOS DE FRENADO DE VEHICULOS EN GENERAL; DISPOSITIVOS PORTATILES PARA EVITAR EL MOVIMIENTO INDESEADO DE VEHICULOS; MODIFICACIONES REALIZADAS EN VEHICULOS PARA FACILITAR LA REFRIGERACION DE LOS FRENOS. › Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10).
- B60T8/88 B60T […] › B60T 8/00 Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10). › con medios que responden a un fallo, es decir medios para detectar o indicar un funcionamiento defectuoso de los medios de control que responden a la condición de velocidad.
- G06F11/00 FISICA. › G06 CALCULO; CONTEO. › G06F PROCESAMIENTO ELECTRICO DE DATOS DIGITALES (sistemas de computadores basados en modelos de cálculo específicos G06N). › Detección de errores; Corrección de errores; Monitorización (detección, corrección o monitorización de errores en el almacenamiento de información basado en el movimiento relativo entre el soporte de registro y el transductor G11B 20/18; monitorización, es decir, supervisión del progreso del registro o reproducción G11B 27/36; en memorias estáticas G11C 29/00).
- G06F11/08 G06F […] › G06F 11/00 Detección de errores; Corrección de errores; Monitorización (detección, corrección o monitorización de errores en el almacenamiento de información basado en el movimiento relativo entre el soporte de registro y el transductor G11B 20/18; monitorización, es decir, supervisión del progreso del registro o reproducción G11B 27/36; en memorias estáticas G11C 29/00). › Detección o corrección de errores por introducción de redundancia en la representación de los datos, p. ej. utilizando códigos de control.
Clasificación antigua:
- B60T8/00 B60T […] › Disposiciones para adaptar la fuerza de frenado sobre la rueda a las condiciones propias del vehículo o al estado del suelo, p. ej. por limitación o variación de la fuerza de frenado (cambiando el número de cilindros de freno en acción en el sistema de frenado B60T 17/10).
- B60T8/88 B60T 8/00 […] › con medios que responden a un fallo, es decir medios para detectar o indicar un funcionamiento defectuoso de los medios de control que responden a la condición de velocidad.
Países PCT: Alemania, España, Francia, Reino Unido, Italia.
PDF original: ES-2358417_T3.pdf
Fragmento de la descripción:
La presente invención se refiere a un método y aparato para monitorizar un microordenador proporcionado en una unidad de control electrónico.
Un microordenador proporcionado en una unidad de control electrónico (ECU) para vehículos generalmente se monitoriza para detectar si el microordenador está funcionando normalmente o no, si una entrada al microordenador es normal o no, o si la operación aritmética en el microordenador es llevada a cabo exactamente o no.
La monitorización se lleva a cabo, por ejemplo, ejecutando la monitorización de perro guardián (WD) para detectar si el periodo de cálculo aritmético en un circuito integrado (IC) de monitorización está en el periodo correcto
o no introduciendo el periodo de cálculo aritmético para el IC de monitorización desde el microordenador. También se puede llevar a cabo comparando el resultado del cálculo aritmético de cada microordenador usando el microordenador adicional de la misma estructura como el microordenador para llevar a cabo la operación de cálculo aritmético.
No obstante, la monitorización de WD provoca que la capacidad de monitorización sea insuficiente debido a que los contenidos de la monitorización son limitados. La monitorización mutua que usa una pareja de microordenadores provoca que no se pueda detectar un fallo si hay un error en los datos introducidos a una pareja de microordenadores y que el coste de monitorización llegue a ser alto porque se usa una pareja de microordenadores.
El documento DE 44 31 901 A1 describe un dispositivo de detección de fallos para un sistema de control de frenos antideslizamiento de un vehículo a motor. Allí se proporciona un microordenador principal para generar una señal de control de la presión hidráulica para el control de un elemento de actuación, que se diseña para la generación de fuerzas de frenado, que van a ser aplicadas a las ruedas del vehículo a motor. Adicionalmente, se proporciona un microordenador secundario para detectar la aparición de un fallo en el ordenador principal en base a la señal de control de la presión hidráulica. Un dispositivo de generación de la señal de prueba se proporciona en el microordenador principal o el microordenador secundario para la generación de una señal de prueba, y un dispositivo aritmético de control de frenos antideslizamiento en el ordenador principal genera una señal de control de la presión hidráulica en base a la señal de la velocidad de la rueda o la señal de prueba. Un dispositivo de monitorización de la señal de control de la presión hidráulica, que se proporciona en el microordenador secundario, monitoriza la señal de la presión hidráulica generada en respuesta a la señal de prueba para comprobar la validez de la señal de control de la presión hidráulica.
Es por lo tanto un objeto de la presente invención proporcionar un método de monitorización de un microordenador sin requerir una pareja de microordenadores.
El objeto se resuelve por los rasgos de la reivindicación independiente 1. Las reivindicaciones dependientes se dirigen a las realizaciones preferentes de la invención.
El anterior y otros objetos, rasgos y ventajas de la presente invención llegarán a ser más evidentes a partir de la siguiente descripción detallada hecha con referencia a los dibujos anexos. En los dibujos:
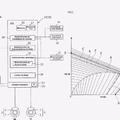
La Fig. 1 es un diagrama esquemático que ilustra un sistema de control del ABS controlado por una ECU para el control del ABS de acuerdo con una primera realización de la presente invención;
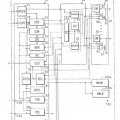
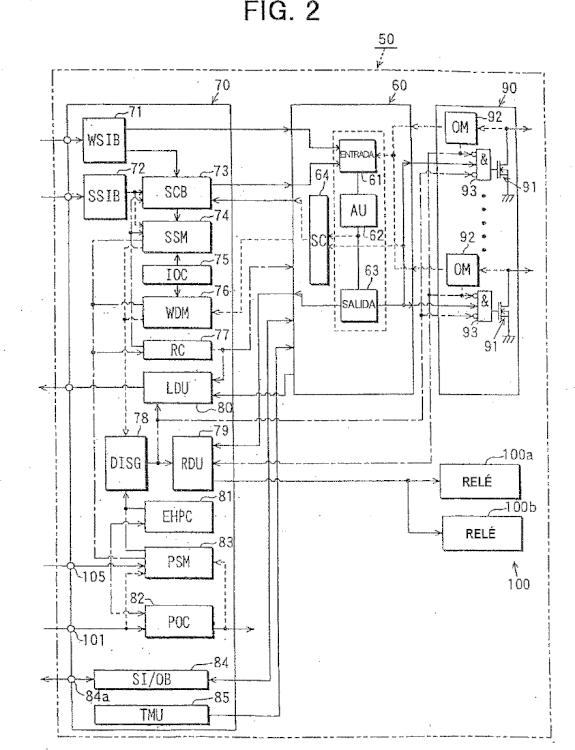
La Fig. 2 es un diagrama de bloques que ilustra la ECU para el control del ABS usado en la primera realización;
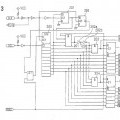
La Fig. 3 es un diagrama del circuito que ilustra una parte del almacenamiento temporal de la comunicación serie usado en la ECU mostrada en la Fig.2;
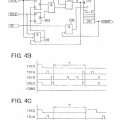
La FIG. 4A es un diagrama del circuito que ilustra un circuito lógico de monitorización del intervalo, y la Fig. 4B y la Fig. 4C son diagramas de tiempo que ilustran las señales producidas en el circuito lógico mostrado en la Fig. 4A;
La FIG. 5A es un diagrama del circuito que ilustra un circuito lógico de monitorización de fallos del microordenador, y la Fig. 5B y 5C son diagramas de temporización que ilustran las señales producidas en el circuito lógico mostrado en la Fig. 5A;
La FIG. 6A es un diagrama del circuito que ilustra un circuito lógico de monitorización de fallos del microordenador para el control del ABS, y la Fig. 6B y 6C son diagramas de temporización que ilustran las señales producidas en el circuito lógico mostrado en la Fig. 6A;
La FIG. 7A es un diagrama del circuito que ilustra un circuito lógico de monitorización de secuencias, y la Fig. 7B es un diagrama de temporización que muestra las señales producidas en el circuito lógico mostrado en la Fig. 7A;
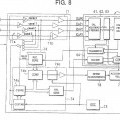
La FIG. 8 es un diagrama del circuito que ilustra un circuito de monitorización del cálculo de la velocidad de la rueda de acuerdo con una segunda realización de la presente invención; y
La FIG. 9A es un diagrama del circuito que ilustra un circuito lógico de monitorización de fallos del microordenador para un control de asistencia de frenos, y la Fig. 9B y Fig. 9C son diagramas de temporización que muestran las señales producidas en el circuito lógico mostrado en la Fig. 9A.
La presente invención se describirá en detalle con referencia a las realizaciones, que se dirigen a una unidad de control electrónico (ECU) para vehículos.
(Primera Realización)
Con referencia primero a la Fig. 1 que muestra un sistema de control de frenado antibloqueo (ABS), se proporcionan una rueda delantera derecha (FR) 1, una rueda delantera izquierda (FL) 2, una rueda trasera derecha (RR) 3 y una rueda trasera izquierda (RL) 4 con unos sensores de velocidad de la rueda tipo de recolección electromagnética, unos tipo dispositivo de efecto magneto resistivo (MRE) o unos tipo dispositivo Hall 5 a 8, respectivamente. Estos sensores de velocidad de la rueda 5 a 8 generan señales de pulsos respectivas que dependen de la rotación de las ruedas 1 a 4.
Además, las ruedas 1 a 4 se proporcionan respectivamente con cilindros de rueda 11 a 14. Cuando un cilindro maestro 16 genera una presión del fluido del freno que depende de la cantidad de pisada del conductor de un pedal de freno 27, esta presión del fluido del freno se transfiere a los cilindros de las ruedas 11 a 14 a través de las válvulas de doble posición (válvulas de control de aumento de presión) 21 a 24 y a través de las tuberías de presión del fluido respectivas. El estado de pisado del pedal del freno 27 se detecta mediante un conmutador de parada 29.
Además, los cilindros de rueda 11, 14 se conectan con un depósito 37 a través de las válvulas de doble posición (válvulas de control de reducción de presión) 31, 34, respectivamente. Los cilindros de las ruedas 12, 13 se conectan con un depósito 39 a través de las válvulas de doble posición (válvulas de control de reducción de presión) 32, 33, respectivamente.
Las válvulas de doble posición 21 a 24 y 31 a 34 cada una se componen de una válvula de doble posición de tipo de accionamiento del solenoide que incluye una posición de comunicación y una posición de corte. Estas posición de comunicación y posición de corte se pueden conmutar suministrado energía eléctrica al solenoide.
Por otra parte, la parte de más arriba y de más abajo de las válvulas de doble posición 21 a 24 se conectan con tuberías de desviación 41 y 44, respectivamente. Estas tuberías de desviación 41 a 44 se proporcionan con válvulas de no retorno 41a a 44a, respectivamente. Solamente la presión del fluido hacia el cilindro maestro 16 desde los cilindros de las ruedas 11 a 14 fluye hacia la tubería de desviación 41 a 44.
Los depósitos 37, 39 se conectan con unas tuberías de presión del fluido a través de las bombas 45a, 45b accionadas por motores no ilustrados y válvulas de no retorno 47, 49, respectivamente. Solamente, se permite fluir la presión del fluido hacia el cilindro maestro 16 desde los depósitos 37, 39.
Las señales de detección de los sensores de velocidad de las ruedas 5 a 8 y el conmutador de parada 29 se introducen a una ECU 50 para el control del ABS. La ECU de control del ABS 50 genera, en base a las señales de detección anteriores, las señales de control para las válvulas de doble posición 21 a 24 y 31 a 34 y las señales de control... [Seguir leyendo]
Reivindicaciones:
1. Una unidad de control que consta de:
un microordenador (60); en donde
la unidad de control se aplica como una unidad de control electrónico para un sistema de control de frenos;
el sistema de control de frenos que incluye las fuentes de generación de la presión del fluido de frenos (16, 27) para generar una presión del fluido de frenos, los medios para generar la fuerza de freno de la rueda (11 a 14) para recibir una presión del fluido de frenos desde la fuente de generación de la presión del fluido de frenos para generar una fuerza de freno respectivamente a cada rueda, las tuberías proporcionadas entre la fuente de generación de la presión del fluido de frenos y los medios de generación de la fuerza de freno de la rueda, y una pluralidad de válvulas de control (21 a 24, 31 a 34) proporcionadas en las tuberías; y
una pluralidad de válvulas de control (21 a 24, 31 a 34) se controlan respectivamente en base a un resultado de operación aritmética del microordenador (60) para la aplicación al control de la presión del fluido de frenos aplicada a los medios de generación de la fuerza de freno de la rueda (11 a 14);
caracterizada porque
la unidad de control además comprende
un IC periférico (70),
en donde el microordenador (60) se construye para transmitir los datos al IC periférico (70);
el IC periférico (70) se construye para monitorizar un fallo del microordenador (60) en base a los datos recibidos desde el microordenador (60);
en donde
una señal que notifica un fallo al microordenador (60) se pone a la salida cuando una señal para aumentar la presión del fluido de frenos aplicada a los medios de generación de la fuerza de freno de la rueda (11 a 14) no se pone a la salida durante un periodo predeterminado de los datos recibidos por el IC periférico (70) bajo el estado de control antibloqueo de frenos o cuando, si tal señal se pone a la salida, esta señal se superpone en la señal para disminuir la presión del fluido de frenos aplicada a los medios de generación de la fuerza de frenado de la rueda (11 a 14).
2. La unidad de control como en la reivindicación 1, en donde:
el microordenador (60) detecta que cualquier rueda está en un estado de tipo deslizamiento para realizar un control antibloqueo de frenos para restringir la rueda del estado de tipo deslizamiento accionando la pluralidad de las válvulas de control (21 a 24, 31 a 34) de la rueda y controlando el aumento o disminución de una presión del fluido de frenos aplicada a los medios de generación de la fuerza de freno de la rueda (11 a 14); y
una señal que notifica el fallo del microordenador (60) es puesta a la salida, cuando se detecta una señal para accionar cualquier válvula de la pluralidad de válvulas de control (21 a 24, 31 a 34) desde los datos recibidos por el IC periférico (70) bajo una condición de que ninguna rueda se detecta como en el estado de tipo deslizamiento.
3. La unidad de control como en la reivindicación 1 ó 2, en donde:
una señal para notificar un fallo del microordenador (60) se pone a la salida cuando se detecta a partir de los datos recibidos por el IC periférico (70) bajo el estado de control antibloqueo de frenos que la señal para disminuir la presión del fluido de frenos aplicada a los medios de generación de la fuerza de freno de la rueda (11 a 14) se pone a la salida durante un periodo determinado.
4. La unidad de control como en cualquiera de las reivindicaciones 1 a 3, en donde:
se proporciona un accionador (90) para accionar respectivamente la pluralidad de las válvulas (21 a 24, 31 a 34); y
el IC periférico (70) pone a la salida una señal para el accionador (90) para inhibir el accionamiento de la pluralidad de las válvulas de control (21 a 24, 31 a 34) cuando se detecta un fallo del microordenador (60).
5. La unidad de control como en cualquiera de las reivindicaciones 1 a 4, en donde: se proporcionan primero los medios de conmutación (100a) para controlar respectivamente el estado de ENCENDIDO/APAGADO de un suministro de voltaje de la pluralidad de las válvulas de control (21 a 24, 31 a 34); y
el IC periférico (70) pone a la salida una señal a los primeros medios de conmutación (100a) para desactivar el suministro de voltaje a la pluralidad de las válvulas de control (21 a 24, 31 a 34) mediante los primeros medios de conmutación (100a) cuando se detecta el fallo del microordenador (60).
Patentes similares o relacionadas:
 SISTEMA DE SEGURIDAD DE FRENADO PARA UN VEHÍCULO GUIADO SOBRE CARRILES Y PROCEDIMIENTO PARA EL CONTROL Y VIGILANCIA DE LA ACCIÓN ACTUAL DE FRENADO DE UN VEHÍCULO GUIADO SOBRE CARRILES Y PARA LA INTRODUCCIÓN DE REACCIONES APROPIADAS DE SEGURIDAD, del 15 de Abril de 2011, de BOMBARDIER TRANSPORTATION GMBH: Sistema de seguridad de frenado para un vehículo guiado sobre carriles, equipado con frenos , con: - un módulo de evaluación con datos de líneas […]
SISTEMA DE SEGURIDAD DE FRENADO PARA UN VEHÍCULO GUIADO SOBRE CARRILES Y PROCEDIMIENTO PARA EL CONTROL Y VIGILANCIA DE LA ACCIÓN ACTUAL DE FRENADO DE UN VEHÍCULO GUIADO SOBRE CARRILES Y PARA LA INTRODUCCIÓN DE REACCIONES APROPIADAS DE SEGURIDAD, del 15 de Abril de 2011, de BOMBARDIER TRANSPORTATION GMBH: Sistema de seguridad de frenado para un vehículo guiado sobre carriles, equipado con frenos , con: - un módulo de evaluación con datos de líneas […]
 GESTIÓN DE LA INTERRUPCIÓN DE LA ALIMENTACIÓN PARA UN SISTEMA DE FRENO ELÉCTRICO DE UN AVIÓN, del 3 de Marzo de 2011, de THE BOEING COMPANY: Un método de hacer funcionar un sistema de freno eléctrico para un avión, comprendiendo el método: hacer funcionar el sistema de freno eléctrico en un modo autofreno […]
GESTIÓN DE LA INTERRUPCIÓN DE LA ALIMENTACIÓN PARA UN SISTEMA DE FRENO ELÉCTRICO DE UN AVIÓN, del 3 de Marzo de 2011, de THE BOEING COMPANY: Un método de hacer funcionar un sistema de freno eléctrico para un avión, comprendiendo el método: hacer funcionar el sistema de freno eléctrico en un modo autofreno […]
PROCEDIMIENTO DE ACCIONAMIENTO DE UN VEHÍCULO DE CUATRO RUEDAS DIRECTRICES CON LA AYUDA DE UN DISPOSITIVO DE FRENADO INDIVIDUAL DE LAS RUEDAS, del 4 de Febrero de 2011, de RENAULT S.A.S.: Procedimiento de accionamiento de un vehículo, que comprende las etapas - cuando se detecta que la desviación sobrepasa un umbral predeterminado, […]
 DIRECCION DE EJE TRASERO PARA UNA GRUA DE VEHICULO, del 14 de Abril de 2010, de TEREX DEMAG GMBH: Dirección de eje trasero para una grúa de vehículo, que presenta al menos un eje trasero dirigido activamente con ruedas dispuestas en el mismo, que comprende:
- […]
DIRECCION DE EJE TRASERO PARA UNA GRUA DE VEHICULO, del 14 de Abril de 2010, de TEREX DEMAG GMBH: Dirección de eje trasero para una grúa de vehículo, que presenta al menos un eje trasero dirigido activamente con ruedas dispuestas en el mismo, que comprende:
- […]
DISPOSITIVO DE FRENADO PARA UN VEHICULO SOBRE RAILES, del 16 de Diciembre de 2009, de SIEMENS AKTIENGESELLSCHAFT: Dispositivo de frenado para un vehículo sobre raíles, en donde al menos una unidad de control de frenado está unida a unidades de frenado a través de un […]
DISPOSITIVO DE FRENADO DE BICICLETAS DE ACCIONAMIENTO REMOTO, del 9 de Abril de 2020, de LÓPEZ MARTÍNEZ, María Natividad: Dispositivo de frenado de bicicletas de accionamiento remoto, vinculable a una bicicleta, que comprende una unidad de control de frenado que comprende unos elementos […]
Procedimiento para la activación de una válvula electromagnética y un correspondiente sistema fluídico, del 9 de Octubre de 2019, de ROBERT BOSCH GMBH: Procedimiento para la activación de una válvula electromagnética en un sistema fluídico ; en donde por un primer período de tiempo predeterminado (TH, TT) una corriente […]
 Dispositivo de freno automático para vehículo de tipo silla de montar, del 31 de Julio de 2019, de HONDA MOTOR CO., LTD.: Un vehículo de tipo silla de montar que tiene un dispositivo de freno automático , comprendiendo el dispositivo de freno automático :
un freno delantero […]
Dispositivo de freno automático para vehículo de tipo silla de montar, del 31 de Julio de 2019, de HONDA MOTOR CO., LTD.: Un vehículo de tipo silla de montar que tiene un dispositivo de freno automático , comprendiendo el dispositivo de freno automático :
un freno delantero […]