PROCEDIMIENTO PARA LA DOCUMENTACIÓN DE INFRACCIONES DE TRÁFICO PRACTICAMENTE SIMULTANEAS.
Procedimiento para la documentación de infracciones de tráfico prácticamente simultáneas,
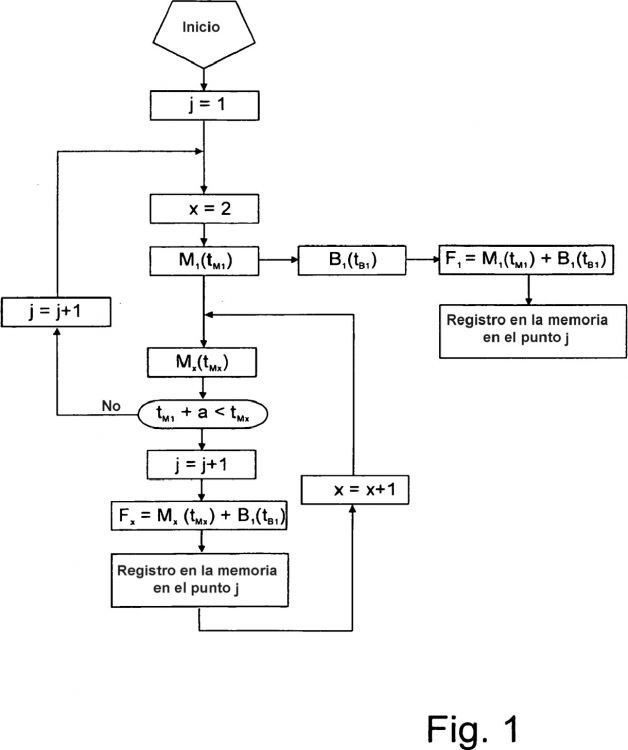
en el que de un primer vehículo (1), que circula por una zona de medición predefinida en una calzada con varios carriles se registran datos de medición y se almacenan como paquete de datos de medición (M1) junto con un momento de medición (tM1) y del primer vehículo se genera mediante una cámara en un momento de toma de imagen (tB1) un toma de imagen, que se almacena como paquete de datos de imagen (B1) y entre el momento de toma de imagen (tB1) y el momento de medición (tM1) existe una correlación temporal conocida, que permite asignar el paquete de datos de imagen (B1) claramente al paquete de datos de medición (M1), para formar un primer paquete de datos de vehículo (F1), caracterizado porque para otros vehículos (X), que circulan por una zona de medición predefinida, se registran datos de medición y se almacenan como paquetes de datos de medición (Mx) junto con momentos de medición (tMX) y se comprueban en el sentido de si sus momentos de medición (tMX) se sitúan dentro de un intervalo de tiempo (a) después del momento de medición (tM1) y eventualmente el paquete de datos de imagen (B1) se duplica para asignar el mismo a los correspondientes paquetes de datos de medición (MX), para formar otros paquetes de datos de vehículo (FX)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07025103.
Solicitante: JENOPTIK ROBOT GMBH.
Nacionalidad solicitante: Alemania.
Dirección: OPLADENER STRASSE 202 40789 MONHEIM AM RHEIN ALEMANIA.
Inventor/es: SCHMITZ,RALF.
Fecha de Publicación: .
Fecha Solicitud PCT: 27 de Diciembre de 2007.
Fecha Concesión Europea: 6 de Octubre de 2010.
Clasificación Internacional de Patentes:
- G08G1/017A
- G08G1/054 FISICA. › G08 SEÑALIZACION. › G08G SISTEMAS DE CONTROL DE TRÁFICO (control de tráfico ferroviario, seguridad del tráfico ferroviario B61L; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para el control del tráfico G01S 13/91, G01S 15/88, G01S 17/88; sistemas de radar o sistemas análogos, sistemas sonar o sistemas lidar especialmente adaptados para anticolisión G01S 13/93, G01S 15/93, G01S 17/93; control de posición, rumbo, altitud o actitud de vehículos terrestres, de agua, el aire o el espacio, no es específico para un entorno de tráfico G05D 1/00). › G08G 1/00 Sistemas de control del tráfico para vehículos en carretera (disposición de las señales de tráfico o las señales de carretera E01F 9/00). › fotografiando los vehículos en exceso de velocidad.
Clasificación PCT:
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
La invención se refiere a un procedimiento para el registro y la documentación de infracciones de tráfico, tales como infracciones de luz roja o infracciones de velocidad.
Por el estado de la técnica, tal como, por ejemplo, por el documento US 2003/0189499 A1, se conocen 5 múltiples procedimientos para el registro de infracciones de tráfico, en los que mediante la detección de un acontecimiento determinado se activa una cámara para registrar datos de imagen del vehículo infractor.
Tales acontecimientos pueden ser, por ejemplo, la comprobación de una velocidad excesiva de un vehículo o la falta de mantenimiento de una distancia predefinida del vehículo con respecto a un punto de referencia, la conducción a una zona de infracción controlada mediante semáforo o la detección de características predefinidas de 10 un vehículo, tal como el sobrepasamiento de una longitud mínima.
Dependiendo del acontecimiento, la cámara, la mayoría de las veces después de un tiempo predeterminado, puede activarse al menos una segunda vez, para obtener al menos dos conjuntos de datos de imagen del vehículo infractor.
Para un procedimiento de acuerdo con la invención no es esencial por qué se activa la cámara. Para la 15 simplificación, todas las posibilidades se indican para esto agrupadas como una activación, provocada por un vehículo infractor.
Los procedimientos para el registro de infracciones de tráfico y dispositivos adecuados para esto se diferencian en cuanto a la aplicación en aquellos en los que la zona de medición de un equipo de medición y el campo de objeto de una cámara están limitados solamente a un carril y en aquellos en los que la zona de medición y 20 el campo de objeto abarcan varios carriles.
Mediante un equipo de medición, que pueden ser sensores, aparatos de medición de radar, aparatos de medición de láser o incluso de cámaras de vídeo con sistemas de procesamiento de imagen situados sobre o en la calzada, se miden los vehículos que pasan por la zona de medición o las zonas de medición. A partir de los resultados de medición se determinan los datos del vehículo que respectivamente interesan. 25
Esto, por norma, es la velocidad del vehículo, una señal de detección y/o la distancia con respecto al equipo de medición. En equipos de medición cuya zona de medición se extiende sobre varios carriles, a los datos del vehículo que interesan también puede pertenecer el ángulo con respecto al eje de recepción del equipo de medición, para diferenciar entre sí vehículos que se sitúan al mismo tiempo en la zona de medición o en las zonas de medición y que circulan en diferentes calzadas. 30
A partir de los resultados de medición de varias mediciones individuales, que suministran respectivamente un conjunto de datos de medición, se pueden derivar otros datos específicos del vehículo, tales como el recorrido de carril del vehículo por la zona de medición o la longitud del vehículo. Los datos específicos del vehículo formados a partir de los resultados de medición de varias mediciones individuales se almacenan junto con datos de identificación, tales como fecha, hora, lugar e identificación del aparato respectivamente como un paquete de datos 35 de medición, es decir, todos los conjuntos de datos de medición almacenados para un vehículo forman de forma común un paquete de datos de medición.
Los conjuntos de datos de imagen obtenidos mediante la cámara también se almacenan, formando respectivamente todos los conjuntos de datos de imagen a asignar a un vehículo un paquete de datos de imagen.
De acuerdo con el estado de la técnica, el paquete de datos de medición y el paquete de datos de imagen 40 se almacenan asignados entre sí. La asignación clara es posible, ya que la medición de un vehículo y su registro son acciones asociadas entre sí, que comienzan con una correlación temporal conocida entre sí.
Para el registro de una infracción de velocidad, por ejemplo, en el momento en el que el aparato de medición verifica la velocidad excesiva, se puede activar una primera toma de imagen o la fotografía se dispara cuando el vehículo se encuentra a una distancia predefinida con respecto a la cámara, que se determina mediante la 45 velocidad y un tiempo de retraso. En ambos casos, la activación de la cámara se inicia mediante una señal del aparato de medición durante el procedimiento de medición, por lo que una asignación de los paquetes de datos de medición e imagen entre sí es clara.
Asimismo existen procedimientos, en los que la cámara se activa mediante una señal independiente del aparato de medición, por ejemplo, por un bucle de inducción. En este caso, la asignación clara del paquete de datos 50 de medición al paquete de datos de imagen correspondiente se realiza por la relación temporal fija del registro de datos. Si, por tanto, el registro de los datos de medición y los datos de imagen comienza con el vehículo que pasa sobre el bucle de inducción, entonces al paquete de datos de medición y al paquete de datos de imagen se asigna la misma hora, por la que el paquete de datos de medición y el paquete de datos de imagen se pueden asignar claramente entre sí. 55
La asociación entre los paquetes de datos de medición y los paquetes de datos de imagen, independientemente de cómo se realice, se realiza de acuerdo con el estado de la técnica siempre mediante una asignación clara, que se basa en una correlación temporal conocida entre los paquetes de datos. Se da una correlación temporal fija cuando un primer momento de medición y un primer momento de toma de imagen coinciden en el tiempo o tienen una separación temporal definida entre sí. 60
La correlación temporal no es fija, sin embargo, es conocida, cuando a partir de la velocidad medida y la separación conocida o medida se deriva un tiempo de retraso, para después disparar la fotografía con una separación predefinida del vehículo con respecto a la cámara.
Claro significa que a cada paquete de datos de medición se asigna exactamente un paquete de datos de imagen y a cada paquete de datos de imagen, exactamente un paquete de datos de medición.
Cuándo un paquete de datos de medición y un paquete de datos de imagen se asignan entre sí no es importante, es decir, incluso directamente después de la obtención de los datos ya se pueden agrupar y almacenar 5 de forma común como paquete de datos del vehículo.
Este tipo de procesamiento de datos se ha visto que es desventajoso para soluciones en las que al mismo tiempo o prácticamente al mismo tiempo se pueden medir varios vehículos.
Después de que se haya activado la cámara por un primer vehículo, la cámara no está preparada durante un espacio de tiempo determinado para ser activada por un segundo vehículo. Cómo de largo sea este espacio de 10 tiempo depende particularmente de cuántas tomas de imagen sucesivas se generen respectivamente después de una primera toma de imagen.
En una supuesta infracción de luz roja siguen por norma después de una primera toma de imagen, que registra el vehículo en la línea de detención, una segunda toma de imagen, que muestra el vehículo a la altura del semáforo o en la zona de cruce así como, eventualmente, una tercera. Estas tomas de imagen adicionales se 15 generan después de un intervalo de tiempo fijo o dependiendo de la velocidad del vehículo infractor en un momento, en el que el vehículo infractor se tiene que esperar en un lugar determinado.
Para vehículos que se miden en este espacio de tiempo muerto que se produce y que se identifican mediante los resultados de medición como vehículos infractores, no existen tomas de imagen, es decir, tampoco ningún paquete de datos de imagen. Para estos vehículos infractores no se puede generar ningún paquete de datos 20 de vehículo, es decir, estas infracciones de tráfico no se pueden documentar y, por lo tanto, tampoco se pueden sancionar.
Una solución trivial de este problema sería instalar por carril una cámara, que se activara respectivamente cuando se registrase una infracción a asignar a este carril. Sin embargo, esto conduce a mayores costes de adquisición, instalación y mantenimiento para la entidad explotadora. 25
La invención se basa en el objetivo de proporcionar un procedimiento con el que se puedan documentar infracciones de tráfico registradas en cuanto a la técnica de medición prácticamente de forma simultánea...
Reivindicaciones:
1. Procedimiento para la documentación de infracciones de tráfico prácticamente simultáneas, en el que de un primer vehículo (1), que circula por una zona de medición predefinida en una calzada con varios carriles se registran datos de medición y se almacenan como paquete de datos de medición (M1) junto con un momento de medición (tM1) 5 y del primer vehículo se genera mediante una cámara en un momento de toma de imagen (tB1) un toma de imagen, que se almacena como paquete de datos de imagen (B1) y entre el momento de toma de imagen (tB1) y el momento de medición (tM1) existe una correlación temporal conocida, que permite asignar el paquete de datos de imagen (B1) claramente al paquete de datos de medición (M1), para formar un primer paquete de datos de vehículo (F1), caracterizado porque 10
para otros vehículos (X), que circulan por una zona de medición predefinida, se registran datos de medición y se almacenan como paquetes de datos de medición (Mx) junto con momentos de medición (tMX) y se comprueban en el sentido de si sus momentos de medición (tMX) se sitúan dentro de un intervalo de tiempo (a) después del momento de medición (tM1) y eventualmente el paquete de datos de imagen (B1) se duplica para asignar el mismo a los correspondientes paquetes de datos de medición (MX), para formar otros paquetes de datos de vehículo (FX). 15
2. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque para cada carril está predefinida una zona de medición.
3. Procedimiento de acuerdo con la reivindicación 2, caracterizado porque las zonas de medición están 20 determinadas mediante sensores situados en la calzada.
4. Procedimiento de acuerdo con la reivindicación 3, caracterizado porque como datos de medición se registran las velocidades de vehículo.
25
5. Procedimiento de acuerdo con la reivindicación 1, caracterizado porque solamente una zona de medición está predefinida por una radiación de medición que abarca varios carriles.
6. Procedimiento de acuerdo con la reivindicación 5, caracterizado porque la radiación de medición es una radiación de radar. 30
7. Procedimiento de acuerdo con la reivindicación 6, caracterizado porque los datos de medición son las velocidades de los vehículos, su separación con respecto a un equipo de medición y sus ángulos con respecto a un eje del equipo de medición.
35
8. Procedimiento de acuerdo con una de las reivindicaciones precedentes, caracterizado porque el intervalo de tiempo (a) es menor de 10 s, particularmente menor de 2 s.
9. Procedimiento de acuerdo con la reivindicación 8, caracterizado porque el intervalo de tiempo (a) se fija dependiendo de la diferencia de velocidad entre los vehículos. 40
10. Procedimiento de acuerdo con la reivindicación 8, caracterizado porque el intervalo de tiempo (a) se predefine y representa una magnitud fija.
Patentes similares o relacionadas:
PROCEDIMIENTO PARA LA MEDICIÓN PUNTUAL DE VELOCIDAD DE VEHÍCULOS A MOTOR, del 3 de Mayo de 2018, de UNIVERSIDAD DE ALCALA.: Procedimiento para la medición puntual de la velocidad de vehículos a motor, mediante al menos dos cámaras en un punto , apuntando a dos regiones […]
Procedimiento para la medición puntual de velocidad de vehículos a motor en tramo corto con geometría de mínimo error, del 30 de Abril de 2018, de UNIVERSIDAD DE ALCALA.: Procedimiento para la medición puntual de velocidad de vehículos a motor en tramo corto con geometría de mínimo error. La invención se refiere a un procedimiento […]
Procedimiento para detectar excesos de velocidad con almacenamiento restrictivo, del 6 de Septiembre de 2017, de JENOPTIK ROBOT GMBH: Procedimiento para la detección de excesos de velocidad con almacenamiento restrictivo de datos, en el que vehículos circulan a través […]
 Procedimientos y dispositivos para la toma de imágenes de un vehículo que supera una velocidad, del 16 de Febrero de 2016, de KAPSCH TRAFFICCOM AG: Procedimiento para la toma de imágenes de vehículos que recorren un tramo entre una entrada y una salida con velocidad demasiado alta, que […]
Procedimientos y dispositivos para la toma de imágenes de un vehículo que supera una velocidad, del 16 de Febrero de 2016, de KAPSCH TRAFFICCOM AG: Procedimiento para la toma de imágenes de vehículos que recorren un tramo entre una entrada y una salida con velocidad demasiado alta, que […]
Procedimiento para captar de forma concluyente la velocidad de un vehículo, del 1 de Julio de 2015, de JENOPTIK ROBOT GMBH: Procedimiento para medir la velocidad de un vehículo, en el que - un aparato de radar dirige una radiación de radar sobre una carretera de modo que al mismo […]
Método para detectar infracciones del límite de velocidad de un vehículo, del 26 de Noviembre de 2014, de KAPSCH TRAFFICCOM AG: Un método para detectar una infracción de la velocidad de un vehículo que se desplaza desde un primer sistema de carretera (G1) hasta un segundo sistema de carretera […]
Dispositivos y método para controlar un sistema de peaje de carreteras, del 24 de Septiembre de 2014, de KAPSCH TRAFFICCOM AG: Un dispositivo de control para un sistema de peaje de carreteras que se basa en unidades de a bordo transportadas por vehículos , que comprende: al […]
 Método de control para un sistema de peaje de carreteras, del 13 de Agosto de 2014, de KAPSCH TRAFFICCOM AG: Un método de control para un sistema de peaje de carreteras que se basa en unidades de a bordo transportadas por vehículos que tienen números […]
Método de control para un sistema de peaje de carreteras, del 13 de Agosto de 2014, de KAPSCH TRAFFICCOM AG: Un método de control para un sistema de peaje de carreteras que se basa en unidades de a bordo transportadas por vehículos que tienen números […]