PROCEDIMIENTO PARA LA MEDICION DE UN ESPACIO DE APARCAMIENTO Y LA DETECCION DE OBSTACULOS DURANTE EL PROCESO DE APARCAMIENTO DE UN VEHICULO, ASI COMO SISTEMA DE MEDICION CORRESPONDIENTE.
Procedimiento para la medición de un espacio de aparcamiento y la detección de obstáculos durante el proceso de aparcamiento de un vehículo con al menos un sensor ultrasónico de espacio (16),
controlable en un modo de medición de espacio, para medir un espacio de aparcamiento al pasar por delante del espacio de aparcamiento y con al menos otro sensor ultrasónico de obstáculo (12), controlable en un modo de aparcamiento diferente al modo de medición de espacio, para detectar obstáculos durante un proceso de aparcamiento, caracterizado por el hecho de que el sensor de obstáculo (12) recibe en el modo de medición de espacio señales ultrasónicas que se evalúan para una detección de sonidos parásitos
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/004249.
Solicitante: VALEO SCHALTER UND SENSOREN GMBH.
Nacionalidad solicitante: Alemania.
Dirección: LAIERNSTRASSE 12,74321 BIETIGHEIM-BISSINGEN.
Inventor/es: JECKER,NICOLAS, GRIMM,OLIVER.
Fecha de Publicación: .
Fecha Concesión Europea: 24 de Marzo de 2010.
Clasificación Internacional de Patentes:
- G01S15/87 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 15/00 Sistemas que utilizan la reflexión o rerradiación de ondas acústicas, p. ej. sistemas de sonar. › Combinaciones de sistemas de sonar.
- G01S15/93C
Clasificación PCT:
- B60Q1/48 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60Q DISPOSICION DE DISPOSITIVOS DE SEÑALIZACION O ILUMINACION, SU MONTAJE O SOPORTE, SUS CIRCUITOS, PARA VEHICULOS EN GENERAL. › B60Q 1/00 Disposición de dispositivos de señalización óptica o de iluminación, su montaje, su soporte o los circuitos a este efecto (para la iluminación del interior del vehículo B60Q 3/00). › para aparcar.
- G01S13/93 G01S […] › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › para anticolisión.
- G01S15/93 G01S 15/00 […] › como anti-colisión.
- G01S7/527 G01S […] › G01S 7/00 Detalles de sistemas según los grupos G01S 13/00, G01S 15/00, G01S 17/00. › Extracción de las señales de eco deseadas.
Fragmento de la descripción:
Procedimiento para la medición de un espacio de aparcamiento y la detección de obstáculos durante el proceso de aparcamiento de un vehículo, así como sistema de medición correspondiente.
La invención se refiere a un procedimiento para la medición de un espacio de aparcamiento y la detección de obstáculos durante el proceso de aparcamiento de un vehículo, así como a un sistema de medición para esto.
Del estado de la técnica se conocen procedimientos para la medición de un espacio de aparcamiento, en los que un espacio de aparcamiento se mide mediante sensores ultrasónicos. Este tipo de sensores se encuentra dispuesto generalmente en los laterales del vehículo y registra una zona lateral al lado del vehículo, que discurre en sentido vertical al eje longitudinal del vehículo. Cuando se mide el espacio de aparcamiento, los sensores de espacio se operan en el modo de medición de espacio, en el que el vehículo puede tener una velocidad comparativamente alta de hasta 30 km/h. La medición se realiza en ciclos de medición más cortos debido a la velocidad mayor. Por consiguiente, el resultado de la medición es en general comparativamente inexacto.
Del estado de la técnica se conocen también procedimientos para la detección de obstáculos durante el proceso de aparcamiento de un vehículo. Este tipo de procedimientos usa para la detección de obstáculos un sensor ultrasónico que está dispuesto generalmente en el lado delantero y/o trasero del vehículo y/o en la esquina del vehículo. Durante el proceso de aparcamiento, el sensor ultrasónico correspondiente se controla en un modo de aparcamiento, en el que se realiza una medición comparativamente exacta con ciclos de medición más largos debido a la velocidad comparativamente baja del vehículo al aparcarse. La técnica de la detección de obstáculos durante el aparcamiento se conoce desde hace varios años y se ha perfeccionado comparativamente. Así, por ejemplo, para el funcionamiento de sensores de obstáculo existen posibilidades de detección de sonidos parásitos que permiten identificar el sonido parásito existente. Como fuentes de sonidos parásitos se toman en consideración especialmente las precipitaciones fuertes, las vibraciones causadas por otros vehículos como máquinas barredoras o motocicletas, los ruidos de escape o similares.
Del documento DE10206764 se conoce un procedimiento para el aparcamiento de un vehículo, en el que las distancias del vehículo respecto a los obstáculos se miden mediante una pluralidad de sensores ultrasónicos que pueden estar dispuestos en el lado frontal, el lado trasero y el lado derecho e izquierdo del vehículo. De este modo, el conductor puede recibir indicaciones sobre espacios adecuados de aparcamiento al pasar por delante de estos, así como también avisos sobre colisiones con obstáculos durante el proceso de aparcamiento.
La presente invención tiene el objetivo de proporcionar un procedimiento del tipo mencionado al inicio, en el que se pueda detectar fácilmente el sonido parásito en el modo de medición de espacio.
Este objetivo se consigue mediante un procedimiento para la medición de un espacio de aparcamiento y la detección de obstáculos durante el proceso de aparcamiento de un vehículo con al menos un sensor ultrasónico de espacio, controlable en un modo de medición de espacio, para medir un espacio de aparcamiento al pasar por delante del espacio de aparcamiento y con al menos otro sensor ultrasónico de obstáculo, controlable en un modo de aparcamiento diferente al modo de medición de espacio, para detectar obstáculos durante el proceso de aparcamiento, recibiendo el sensor de obstáculo en el modo de medición de espacio señales ultrasónicas que se evalúan para una detección de sonidos parásitos.
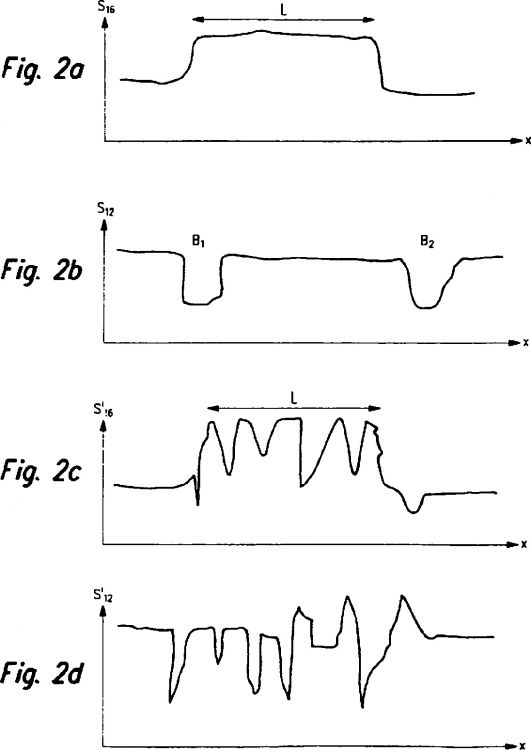
El procedimiento según la invención tiene la ventaja de que se recurre a la técnica perfeccionada de la detección de obstáculos durante el proceso de aparcamiento para detectar el sonido parásito en el modo de medición de espacio. A tal efecto se usan sensores de obstáculo, no necesarios en el modo de medición de espacio, porque no señalan en dirección del espacio de aparcamiento que se va a medir, para recibir señales de sonidos parásitos que se pueden evaluar a continuación con el fin de detectar sonidos parásitos durante la medición de un espacio de aparcamiento. Por consiguiente, en el modo de medición de espacio no sólo se tienen en cuenta las señales del sensor de espacio, sino también las señales ultrasónicas recibidas del al menos un sensor de obstáculo. El sensor de obstáculo se opera ventajosamente en este caso en su modo de obstáculo, de manera que la técnica perfeccionada, conocida en sí, de la detección de sonidos parásitos en relación con el aparcamiento se puede usar también para la medición del espacio de aparcamiento. Esto hace innecesaria una detección propia de sonidos parásitos por parte del sensor de espacio, que se basa en señales ultrasónicas recibidas por el sensor de espacio. La detección de sonidos parásitos se realiza mediante señales ultrasónicas recibidas por el sensor de obstáculo.
En este sentido resulta ventajoso, por una parte, que en el modo de medición de espacio, el sensor de espacio envíe y reciba señales ultrasónicas durante un ciclo de medición de espacio y, por otra parte, el sensor de obstáculo reciba sólo señales ultrasónicas durante su ciclo de medición de aparcamiento. El al menos un sensor de obstáculo "escucha", por decirlo así, el entorno, mientras que el al menos un sensor de espacio mide el espacio de aparcamiento. Por consiguiente, el sonido parásito se puede detectar mediante el sensor de obstáculo que escucha y la correspondiente evaluación perfeccionada de las señales del sensor de obstáculo.
Según una variante de la invención es posible que en el modo de medición de espacio se realice una medición con ciclos de medición más cortos debido a una velocidad mayor de marcha, en especial de hasta 30 km/h aproximadamente, y que en el modo de aparcamiento se realice una medición con ciclos de medición más largos debido a la velocidad menor de marcha que es una velocidad lenta. Debido a la velocidad mayor de marcha en el modo de medición de espacio, la medición no es tan exacta como la medición en el modo de aparcamiento. En el modo de aparcamiento se pueden detectar obstáculos con más exactitud.
Según la invención es posible también que el sonido parásito registrado por el sensor de obstáculo se detecte mediante una lógica de detección de sonidos parásitos almacenada para el modo de aparcamiento. El sensor de espacio no tiene entonces una detección propia de sonidos parásitos. El sonido parásito se detecta exclusivamente mediante el sensor de obstáculo y la correspondiente lógica almacenada de detección de sonidos parásitos.
Según una variante de la invención puede estar previsto que la medición del espacio de aparcamiento se interrumpa al detectarse sonidos parásitos. En especial cuando se supera un umbral crítico de sonido parásito que hace imposible una evaluación ulterior de los resultados de medición, se puede prever la interrupción de la medición del espacio de aparcamiento. El conductor del vehículo recibe la información de que su sistema de medición del espacio de aparcamiento ya no funciona correctamente. Según la invención puede estar previsto naturalmente que el sonido parásito, producido en menor medida, se pueda eliminar mediante filtros. Sólo cuando el sonido parásito supere un umbral crítico, puede estar previsto que se interrumpa la medición del espacio de aparcamiento.
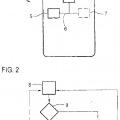
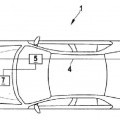
El objetivo mencionado al inicio se consigue también mediante un sistema ultrasónico de medición para un vehículo para la medición de un espacio de aparcamiento y la detección de obstáculos durante el proceso de aparcamiento con un primer dispositivo de control, con al menos un sensor de espacio, dispuesto en el lateral del vehículo y controlable por el primer dispositivo de control en un modo de medición de espacio, para medir un espacio de aparcamiento al pasar por delante del espacio de aparcamiento y con al menos otro sensor de obstáculo, dispuesto en la esquina, la zona frontal y/o trasera y controlable por otro dispositivo de control o por el primer dispositivo de control en un modo de aparcamiento, para detectar obstáculos durante el proceso de aparcamiento, recibiendo el primer dispositivo de control en el modo de medición de espacio señales iniciales del sensor de obstáculo para una detección de sonidos parásitos. Debido a la técnica perfeccionada de detección de sonidos parásitos en el modo de aparcamiento...
Reivindicaciones:
1. Procedimiento para la medición de un espacio de aparcamiento y la detección de obstáculos durante el proceso de aparcamiento de un vehículo con al menos un sensor ultrasónico de espacio (16), controlable en un modo de medición de espacio, para medir un espacio de aparcamiento al pasar por delante del espacio de aparcamiento y con al menos otro sensor ultrasónico de obstáculo (12), controlable en un modo de aparcamiento diferente al modo de medición de espacio, para detectar obstáculos durante un proceso de aparcamiento, caracterizado por el hecho de que el sensor de obstáculo (12) recibe en el modo de medición de espacio señales ultrasónicas que se evalúan para una detección de sonidos parásitos.
2. Procedimiento según la reivindicación 1, caracterizado por el hecho de que en el modo de medición de espacio, el sensor de espacio (16) envía y recibe, por una parte, señales ultrasónicas durante un ciclo de medición de espacio y, por otra parte, el sensor de obstáculo (12) recibe sólo señales ultrasónicas.
3. Procedimiento según la reivindicación 1 ó 2, caracterizado por el hecho de que en el modo de medición de espacio se realiza una medición con ciclos de medición más cortos debido a una velocidad mayor de marcha y porque en el modo de aparcamiento se realiza una medición con ciclos de medición más largos debido a la velocidad menor de marcha.
4. Procedimiento según la reivindicación 1, 2 ó 3, caracterizado por el hecho de que el sonido parásito registrado por el sensor de obstáculo se detecta mediante una lógica de detección de sonidos parásitos almacenada para el modo de aparcamiento.
5. Procedimiento según una de las reivindicaciones anteriores, caracterizado por el hecho de que la medición del espacio de aparcamiento se interrumpe al detectarse sonidos parásitos.
6. Sistema ultrasónico de medición (10) para un vehículo para la medición de un espacio de aparcamiento y la detección de obstáculos durante el proceso de aparcamiento con un primer dispositivo de control (18), con al menos un sensor de espacio (16), dispuesto en el lateral del vehículo (10) y controlable por el primer dispositivo de control (18) en un modo de medición de espacio, para medir un espacio de aparcamiento al pasar por delante del espacio de aparcamiento y con al menos otro sensor de obstáculo (12), dispuesto en la esquina, la zona frontal y/o trasera y controlable por otro dispositivo de control o por el primer dispositivo de control (14 ó 18) en un modo de aparcamiento, para detectar obstáculos durante el proceso de aparcamiento, caracterizado por el hecho de que el primer dispositivo (18) de control en el modo de medición de espacio recibe señales iniciales del sensor de obstáculo (12) para una detección de sonidos parásitos.
7. Sistema ultrasónico de medición según la reivindicación 6 con el primer dispositivo de control (18) y el otro dispositivo de control (14), caracterizado por el hecho de que la detección de sonidos parásitos se realiza en el otro dispositivo de control (14) y porque el otro dispositivo de control (14) comunica al primer dispositivo de control (18) si hay sonido parásito.
8. Sistema ultrasónico de medición según la reivindicación 6, caracterizado por el hecho de que sólo está previsto el primer dispositivo de control (18, 20) y porque el primer dispositivo de control (18, 20) controla en el modo de medición de espacio el al menos un sensor de espacio (16) y en el modo de aparcamiento el al menos un sensor de obstáculo (12).
9. Sistema ultrasónico de medición según la reivindicación 6, 7 u 8, caracterizado por el hecho de que el al menos un sensor de espacio (16) tiene al menos una configuración ampliamente idéntica en relación con el al menos un sensor de obstáculo (12).
10. Sistema ultrasónico de medición según una de las reivindicaciones 6 a 9, caracterizado por el hecho de que el sensor de espacio se puede controlar y operar como sensor de obstáculo y/o el sensor de obstáculo como sensor de espacio mediante el dispositivo de control.
11. Sistema ultrasónico de medición según una de las reivindicaciones 6 a 10 para la realización del procedimiento según una de las reivindicaciones 1 a 5.
Patentes similares o relacionadas:
Sistema y procedimiento para la detección de blancos, del 23 de Noviembre de 2018, de Universiteit Antwerpen: Un sensor basado en sónar adaptado para la localización de un blanco en el aire, el sensor que comprende: - un emisor de banda ancha o ultraancha que emite […]
Arquitectura de un sistema multiestático acústico, del 28 de Diciembre de 2016, de THALES: Sistema acústico que consta al menos de una base emisora que consta de unos medios de emisión de un pulso sonar y de al menos […]
 Procedimiento de detección de perturbaciones del proceso de medición de una disposición de medición con ultrasonido de un vehículo de motor y vehículo de motor, del 27 de Agosto de 2014, de AUDI AG: Procedimiento para la detección de perturbaciones del proceso de medición de una disposición de medición con ultrasonido de un vehículo […]
Procedimiento de detección de perturbaciones del proceso de medición de una disposición de medición con ultrasonido de un vehículo de motor y vehículo de motor, del 27 de Agosto de 2014, de AUDI AG: Procedimiento para la detección de perturbaciones del proceso de medición de una disposición de medición con ultrasonido de un vehículo […]
 Sistema acústico y con soporte táctil de información a los ocupantes del vehículo, del 20 de Agosto de 2014, de RHEINMETALL LANDSYSTEME GMBH: Sistema acústico de información a los ocupantes del vehículo para la supervisión de un entorno exterior del vehículo, en particular para vehículos […]
Sistema acústico y con soporte táctil de información a los ocupantes del vehículo, del 20 de Agosto de 2014, de RHEINMETALL LANDSYSTEME GMBH: Sistema acústico de información a los ocupantes del vehículo para la supervisión de un entorno exterior del vehículo, en particular para vehículos […]
 Procedimiento y aparato para la detección y clasificación de un objeto que se encuentra en el agua, del 15 de Marzo de 2013, de Kongsberg Defence & Aerospace AS: Aparato con modo de funcionamiento variable para la detección y clasificación de un objeto móvil sumergido apartir de una señal pasiva generada por el objeto y […]
Procedimiento y aparato para la detección y clasificación de un objeto que se encuentra en el agua, del 15 de Marzo de 2013, de Kongsberg Defence & Aerospace AS: Aparato con modo de funcionamiento variable para la detección y clasificación de un objeto móvil sumergido apartir de una señal pasiva generada por el objeto y […]
MÉTODO PARA CARACTERIZAR EL TRÁFICO RODADO, del 22 de Marzo de 2012, de UNIVERSIDAD CARLOS III DE MADRID: La presente invención está dirigida a un método que permite caracterizar el tráfico rodado a lo largo de una vía de circulación que contiene […]
 DISPOSITIVO PARA DETECTAR UN OBJETO MÓVIL, del 6 de Mayo de 2011, de ROBERT BOSCH GMBH: Dispositivo para un vehículo de motor con al menos un sensor de ultrasonidos para detectar un objeto móvil, en especial un vehículo que se aproxima, […]
DISPOSITIVO PARA DETECTAR UN OBJETO MÓVIL, del 6 de Mayo de 2011, de ROBERT BOSCH GMBH: Dispositivo para un vehículo de motor con al menos un sensor de ultrasonidos para detectar un objeto móvil, en especial un vehículo que se aproxima, […]
 SISTEMA Y PROCEDIMIENTO PARA LA DETERMINACIÓN DE LA POSICIÓN DE OBJETOS, del 5 de Abril de 2011, de SONITOR TECHNOLOGIES AS: Unidad de transmisión para su utilización en un sistema para determinar la posición de objetos a los que están fijadas las unidades de transmisión […]
SISTEMA Y PROCEDIMIENTO PARA LA DETERMINACIÓN DE LA POSICIÓN DE OBJETOS, del 5 de Abril de 2011, de SONITOR TECHNOLOGIES AS: Unidad de transmisión para su utilización en un sistema para determinar la posición de objetos a los que están fijadas las unidades de transmisión […]