OPTIMIZACIÓN DE LA RESPUESTA FRECUENCIAL DE UN SIMULADOR DE MOVIMIENTO MEDIANTE SEGUIMIENTO ADAPTATIVO DE CONSIGNAS SINUSOIDALES.
Dispositivo de condicionado con retroacción de un simulador de movimiento (10) que permite un seguimiento efectivo por el simulador de una consigna,
estando modelizado dicho simulador de movimiento, entre su entrada constituida por una señal de mando u(t) y su salida constituida por una magnitud medida y(t) entre su velocidad, su posición o su aceleración, por una función de transferencia B(z -1)/A(z -1), comprendiendo dicho dispositivo de condicionado un corrector (20) sintetizado a partir de dicha modelización del simulador de movimiento y que equivale a un corrector RST, comprendiendo dicho corrector una entrada de consigna, una entrada de retroacción a la que se aplica dicha magnitud medida y(t) y una salida que produce dicha señal de mando u(t), siendo entonces la función de transferencia entre la entrada de consigna del corrector y la magnitud medida H(z -1)/W(z -1), caracterizado porque comprende además un filtro de consigna (30) que toma en la entrada la consigna que es una señal de consigna sinusoidal c(t) que presenta una pulsación wc y que aplica en la salida una señal de consigna filtrada c'(t) a la entrada de consigna de dicho corrector (20); presentando dicho filtro de consigna una función de transferencia Rr(z -1)/Fr(z -1), y siendo adaptativo, y porque dicho numerador Rr(z -1) de la función de transferencia es tal que la - 1-1-1-1expresión Fr(z )W(z)-Rr(z )H(z ) se factoriza en la forma: **(Ver fórmula)**y porque dicho numerador Rr(z -1) de la función de transferencia es la solución de una ecuación denominada de Bezout: **(Ver fórmula)**para la pulsación wc de la señal de consigna, y porque comprende un medio para determinar Rr(z -1) adecuado para resolver en línea la ecuación de Bezout en función del parámetro que constituye la pulsación wc de dicha señal de consigna
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08300040.
Solicitante: SOCIETE NOUVELLE WUILFERT.
Nacionalidad solicitante: Francia.
Dirección: 52 AVENUE DE L'EUROPE, 78160 MARLY LE ROI.
Inventor/es: VAU,BERNARD.
Fecha de Publicación: .
Fecha Solicitud PCT: 21 de Enero de 2008.
Fecha Concesión Europea: 23 de Junio de 2010.
Clasificación Internacional de Patentes:
- G05B13/04B
- G05B17/02 FISICA. › G05 CONTROL; REGULACION. › G05B SISTEMAS DE CONTROL O DE REGULACION EN GENERAL; ELEMENTOS FUNCIONALES DE TALES SISTEMAS; DISPOSITIVOS DE MONITORIZACION O ENSAYOS DE TALES SISTEMAS O ELEMENTOS (dispositivos de maniobra por presión de fluido o sistemas que funcionan por medio de fluidos en general F15B; dispositivos obturadores en sí F16K; caracterizados por particularidades mecánicas solamente G05G; elementos sensibles, ver las subclases apropiadas, p. ej. G12B, las subclases de G01, H01; elementos de corrección, ver las subclases apropiadas, p. ej. H02K). › G05B 17/00 Sistemas que implican el uso de modelos o de simuladores de dichos sistemas (G05B 13/00, G05B 15/00, G05B 19/00 tienen prioridad; computadores analógicos para procedimientos, sistemas o dispositivos específicos, p. ej. simuladores, G06G 7/48). › eléctricos.
Clasificación PCT:
- G05B13/04 G05B […] › G05B 13/00 Sistemas de control adaptativos, es decir, sistemas que se regulan a sí mismos para obtener un rendimiento óptimo siguiendo un criterio predeterminado (G05B 19/00 tiene prioridad; aprendizaje automático G06N 20/00). › que implican el uso de modelos o de simuladores.
- G05D13/02 G05 […] › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › G05D 13/00 Control de la velocidad lineal; Control de la velocidad angular; Control de la aceleración o de la deceleración, p. ej. de máquina motriz (sincronización de un receptor y de un emisor de telegrafía H04L 7/00). › Detalles.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
Fragmento de la descripción:
La invención pertenece al campo de los simuladores de movimiento condicionados en posición, en velocidad o en aceleración.
Los simuladores de movimiento se utilizan, entre otras cosas, para someter a prueba las características en función de la frecuencia de un componente colocado sobre la plataforma de un simulador de movimiento adecuado para generar movimientos tales como movimientos de rotación instantánea alrededor de un eje. Una categoría de movimientos particularmente interesante para llevar a cabo pruebas está constituida por movimientos tales que la posición, la velocidad o la aceleración angular del eje sea una función sinusoidal caracterizada por una amplitud y una pulsación. Se aplica por tanto una
j·w·t
señal de consigna con la forma Ae(adoptando una notación compleja) y se procede a las mediciones características en el sensor que va a someterse a prueba. Sin embargo, esta prueba sólo tiene valor si el simulador de movimiento presenta efectivamente un movimiento que sigue la señal de consigna. Se intenta por tanto que el movimiento real del simulador de movimiento sea lo más fiel posible con respecto a la consigna. Por cierto, la palabra componente define en este caso cualquier componente inercial o cualquier tipo de sensor que mida una posición, una velocidad o una aceleración.
Unos sistemas de condicionado para simulador de movimiento son conocidos por la solicitud de patente WO2006/161664A o el artículo “Implementation of RST controllers for a flexible servo considering practical limitations” de CHAMPENOIS G. y AP. en Industrial Automation and Control, 1995, pág. 209-213 ISBN 0-7803-2081-6.
La estructura del bucle de condicionado en posición (en velocidad o en aceleración) de un simulador de movimiento es generalmente conforme al esquema representado en la figura 1. El sistema físico que se debe condicionar 10 está constituido por un amplificador de corriente 11, por un motor 12 de corriente continua o de corriente alterna (por ejemplo, motor de corriente alterna sin escobillas: “AC brushless”), por el eje 13 de la máquina y por un sensor 14. El amplificador de corriente 11 recibe, por ejemplo, una orden en forma de una tensión u(t) y aplica en consecuencia la intensidad i(t) correspondiente a los bornes del motor eléctrico 12. Al estar el eje 13 del simulador de movimiento acoplado al rotor del motor eléctrico 12, la circulación de una corriente i(t) adaptada en el estator pone en rotación el eje 13 alrededor de su eje de simetría. El sensor 14 mide una magnitud cinemática instantánea y(t) relativa al movimiento del eje 13 del simulador de movimiento. Esta magnitud medida y(t) puede ser o bien la posición del eje o bien la velocidad de éste, o bien incluso la aceleración de éste (magnitud medida angular o lineal).
El bucle de condicionado consiste en una ley de mando 20 que, a partir de las entradas constituidas a la vez por la señal de consigna c(t) y la magnitud medida y(t), determina el valor del de la orden u(t) que va a aplicarse al sistema condicionado 10. Esta ley de mando se establece mediante un algoritmo de síntesis a partir de una modelización física del comportamiento del sistema que se debe condicionar.
El bucle de condicionado cerrado presentado en la figura 1 presenta la particularidad de presentar un comportamiento “de paso bajo” entre la consigna c(t) y la medición y(t). Lo que significa que la calidad del seguimiento de una consigna sinusoidal depende de la frecuencia de esta consigna. Para las bajas frecuencias (por ejemplo, del orden del hercio), no existe ninguna dificultad particular para garantizar un seguimiento de la consigna sin que aparezca un error significativo, denominado de “arrastre”, entre la consigna c(t) y la magnitud medida y(t), por ejemplo la posición. En cambio, cuanto más aumenta la frecuencia de la consigna sinusoidal, más importante se vuelve el error de arrastre. Para estas frecuencias elevadas, la posición del eje sigue también un movimiento sinusoidal pero con una cierta atenuación de la amplitud que es cada vez más marcada a medida que la frecuencia aumenta. Se define la frecuencia de corte del condicionado como la frecuencia para la que la amplitud de la consigna experimenta una atenuación de ± 3 dB.
Es deseable que la frecuencia de corte, que es un indicador de las prestaciones del condicionado, sea la más alta posible. No obstante, el valor máximo de la frecuencia de corte se limita a causa de las dinámicas de alta frecuencia que no pueden tenerse en cuenta en la modelización de la máquina condicionada, modelización base de la síntesis del condicionado. Estas dinámicas de altas frecuencias sobre la modelización se deben, por ejemplo, a la dinámica eléctrica del motor o, incluso, a las resonancias de la estructura mecánica.
Por otro lado, para que el bucle de condicionado sea estable sea cual sea el movimiento que se desee dar al simulador de movimiento, es necesario concebir un condicionado denominado robusto con respecto a estas dinámicas de alta frecuencia. A título indicativo, la propiedad de robustez de un condicionado garantiza la estabilidad del bucle de condicionado cuando el sistema que se va a controlar se aleja del modelo nominal. Ahora bien, desde un punto de vista teórico, se muestra que la robustez y las prestaciones son dos nociones antagonistas. Es decir, la robustez necesaria en el bucle de condicionado genera unas limitaciones en las prestaciones de este condicionado, y en particular disminuye la frecuencia de corte de este condicionado. Todos los condicionados conocidos utilizados en los simuladores de movimiento actuales experimentan esta restricción.
Además, es necesario añadir que el movimiento sinusoidal del eje no solamente se atenúa con respecto a la señal de consigna sino que también se desfasa con respecto a ésta. Este desfase aumenta notablemente a medida que aumenta la frecuencia. El desfase comienza a ser significativo a frecuencias muy inferiores a la frecuencia de corte del condicionado.
Al ser los simuladores de movimientos unas máquinas con vocación metrológica, esta atenuación y este desfase generan grandes dificultades para una caracterización precisa de los componentes que van a someterse a prueba.
La invención tiene por tanto como objetivo responder a los inconvenientes mencionados anteriormente eliminando o por lo menos reduciendo en gran medida cualquier atenuación y cualquier desfase de la magnitud medida (posición, velocidad o aceleración) con respecto a la consigna sinusoidal.
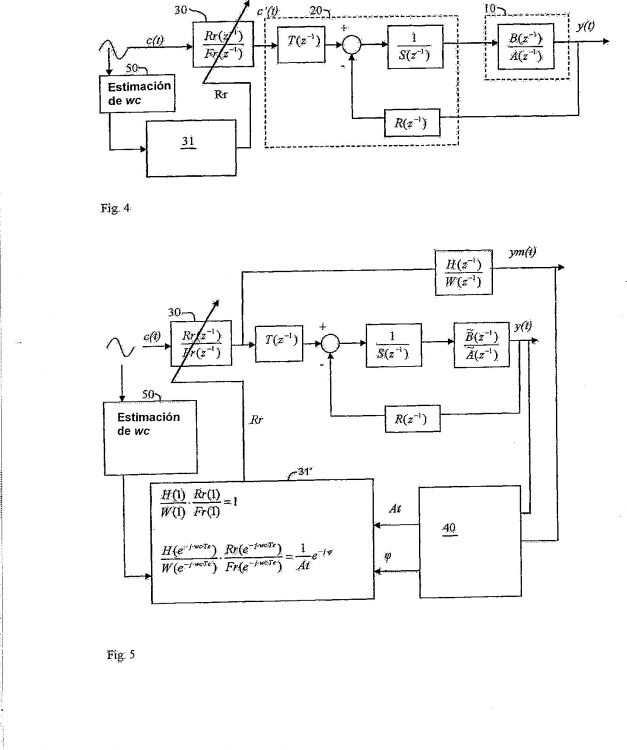
Para ello, la invención se refiere a un dispositivo de condicionado de un simulador de movimiento, estando modelizado dicho simulador de movimiento, entre su entrada constituida por una señal de mando u(t) y su salida constituida por una magnitud medida y(t) (posición, velocidad o aceleración del eje), por una función de transferencia B(z -1)/A(z -1), comprendiendo dicho dispositivo de condicionado un corrector sintetizado a partir de dicha modelización del simulador de movimiento y equivalente a un corrector RST, comprendiendo el corrector una entrada de consigna, una entrada de retroacción a la que se aplica dicha magnitud medida y(t) y una salida que produce dicha señal de mando u(t), siendo entonces la función de transferencia entre la entrada de consigna del corrector y la magnitud medida H(z -1)/W(z -1). Según la invención, el dispositivo de retroacción se caracteriza porque comprende un filtro de consigna que toma en la entrada una señal de consigna sinusoidal c(t) que presenta una pulsación wc y que aplica en la salida una señal de consigna filtrada c'(t) a la entrada de consigna de dicho corrector (20); presentando dicho filtro de consigna una función de transferencia Rr(z -1)/Fr(z -1) cuyo denominador Fr(z -1) y numerador Rr(z -1) se determinan con objeto de garantizar, a la pulsación wc, un seguimiento efectivo por el simulador de movimiento de la consigna sinusoidal.
En un modo de realización, el numerador Rr(z -1) de la función de transferencia es
- 1-1-1 -1
tal que la expresión Fr(z ) W(z )-Rr(z )H(z ) se factoriza en la forma:
**(Ver fórmula)**
y porque dicho numerador Rr(z -1) de la función de transferencia es la solución de una ecuación denominada de Bezout:
**(Ver fórmula)**
para la pulsación wc de la señal de consigna.
10 Preferentemente, el dispositivo comprende un medio para determinar Rr(z -1) adecuado para resolver en línea la ecuación de Bezout en función del parámetro...
Reivindicaciones:
Reivindicaciones
1. Dispositivo de condicionado con retroacción de un simulador de movimiento
(10) que permite un seguimiento efectivo por el simulador de una consigna, estando modelizado dicho simulador de movimiento, entre su entrada constituida por una señal de mando u(t) y su salida constituida por una magnitud medida y(t) entre su velocidad, su posición o su aceleración, por una función de transferencia B(z -1)/A(z -1), comprendiendo dicho dispositivo de condicionado un corrector (20) sintetizado a partir de dicha modelización del simulador de movimiento y que equivale a un corrector RST, comprendiendo dicho corrector una entrada de consigna, una entrada de retroacción a la que se aplica dicha magnitud medida y(t) y una salida que produce dicha señal de mando u(t), siendo entonces la función de transferencia entre la entrada de consigna del corrector y la magnitud medida H(z -1)/W(z -1), caracterizado porque comprende además un filtro de consigna (30) que toma en la entrada la consigna que es una señal de consigna sinusoidal c(t) que presenta una pulsación wc y que aplica en la salida una señal de consigna filtrada c'(t) a la entrada de consigna de dicho corrector (20); presentando dicho filtro de consigna una función de transferencia Rr(z -1)/Fr(z -1), y siendo adaptativo,
y porque dicho numerador Rr(z -1) de la función de transferencia es tal que la
- 1-1-1-1
expresión Fr(z )W(z)-Rr(z )H(z ) se factoriza en la forma:
**(Ver fórmula)**
y porque dicho numerador Rr(z -1) de la función de transferencia es la solución de una ecuación denominada de Bezout:
**(Ver fórmula)**
para la pulsación wc de la señal de consigna, y porque comprende un medio para determinar Rr(z -1) adecuado para resolver en línea la ecuación de Bezout en función del parámetro que constituye la pulsación wc de dicha señal de consigna.
2. Dispositivo de condicionado con retroacción de un simulador de movimiento
(10) que permite un seguimiento efectivo por el simulador de una consigna, estando modelizado dicho simulador de movimiento, entre su entrada constituida por una señal de mando u(t) y su salida constituida por una magnitud medida y(t) entre su velocidad, su
posición o su aceleración, por una función de transferencia B(z -1)/A(z -1), comprendiendo dicho dispositivo de condicionado un corrector (20) sintetizado a partir de dicha modelización del simulador de movimiento y equivalente a un corrector RST, comprendiendo dicho corrector una entrada de consigna, una entrada de retroacción a la 5 que se aplica dicha magnitud medida y(t) y una salida que produce dicha señal de mando u(t), siendo por tanto la función de transferencia entre la entrada de consigna del corrector y la magnitud medida H(z -1)/W(z -1); caracterizado porque comprende además un filtro de consigna (30) que toma en la entrada la consigna que es una señal de consigna sinusoidal c(t) que presenta una pulsación wc y que aplica en la salida una señal de consigna filtrada 10 c'(t) a la entrada de consigna de dicho corrector (20); presentando dicho filtro de consigna
una función de transferencia Rr(z -1)/Fr(z -1) y siendo adaptativo, y porque comprende: -un medio de simulación del conjunto formado por el corrector y por el sistema
físico, que produce una magnitud medida ideal ym(t) y que presenta como 15 función de transferencia H(z -1)/W(z -1);
- un medio de estimación de la atenuación y del desfase residuales adecuado para determinar, a partir de la magnitud medida real y(t) y de la magnitud medida ideal ym(t), los valores de la atenuación residual At y del desfase residual ϕ, entre el movimiento real y(t) del simulador de movimiento y la
20 magnitud medida ideal ym(t);
- un medio de determinación de Rr(z -1) adecuado para calcular en línea, a la pulsación wc de la señal de consigna, dicho numerador Rr(z -1) de la función de transferencia del filtro de consigna, en función de la atenuación y del desfase residuales determinados por dicho medio de estimación, por resolución en
25 línea del sistema de ecuaciones:
**(Ver fórmula)**
tomando el medio de determinación de Rr(z -1) también como parámetro de entrada el valor de la pulsación de dicha señal de consigna.
3. Dispositivo de condicionado según la reivindicación 2, caracterizado porque dicho medio de estimación de la atenuación y del desfase residuales se basa en un algoritmo de identificación recursivo, por ejemplo un algoritmo de los mínimos cuadrados.
4. Dispositivo de condicionado según una de las reivindicaciones anteriores, caracterizado porque comprende un medio de estimación de la pulsación adecuado para determinar dicho valor de la pulsación de la consigna aplicado en la entrada de dicho filtro de consigna.
5. Dispositivo de condicionado según la reivindicación 4, caracterizado porque dicho medio de estimación de la pulsación se basa en un algoritmo de identificación recursivo, por ejemplo un algoritmo de los mínimos cuadrados generalizados.
6. Procedimiento de condicionado con retroacción de un simulador de movimiento que permite un seguimiento efectivo por el simulador de una consigna, estando modelizado dicho simulador de movimiento, entre su entrada constituida por una señal de mando u(t) y su salida constituida por una magnitud medida y(t) entre su posición, su velocidad y su aceleración, por una función de transferencia B(z -1)/A(z -1), comprendiendo dicho dispositivo de condicionado un corrector (20) sintetizado a partir de dicha modelización del simulador de movimiento y equivalente a un corrector RST, comprendiendo dicho corrector una entrada de consigna, una entrada de retroacción a la que se aplica dicha magnitud medida y(t) y una salida que produce dicha señal de mando u(t), siendo entonces la función de transferencia entre la entrada de consigna del corrector y la magnitud medida H(z -1)/W(z -1); caracterizado porque se filtra una señal de consigna sinusoidal (30) que presenta una pulsación wc para aplicar una señal de consigna filtrada c'(t) a la entrada de consigna de dicho corrector (20); siendo el filtrado de la señal de consigna adaptativo, y
porque el filtrado se realiza según una función de transferencia Rr(z -1)/Fr(z -1) cuyo
- 1-1-1-1-1
numerador Rr(z ) se determina para que la expresión Fr(z )W(z ) -Rr(z )H(z ) se factorice en la forma:
**(Ver fórmula)**
y cuyo numerador Rr(z -1) se determina como la solución de una ecuación
denominada de Bezout:
**(Ver fórmula)**
para la pulsación wc de la señal de consigna y porque se determina Rr(z -1) en línea resolviendo dicha ecuación de Bezout en función del parámetro que constituye la 5 pulsación wc de dicha señal de consigna.
7. Procedimiento de condicionado con retroacción de un simulador de movimiento que permite un seguimiento efectivo por el simulador de una consigna, estando modelizado dicho simulador de movimiento, entre su entrada constituida por una señal de mando u(t) y su salida constituida por una magnitud medida y(t) entre su posición, su velocidad y su aceleración, por una función de transferencia B(z -1)/A(z -1), comprendiendo dicho dispositivo de condicionado un corrector (20) sintetizado a partir de dicha modelización del simulador de movimiento y equivalente a un corrector RST, comprendiendo dicho corrector una entrada de consigna, una entrada de retroacción a la que se aplica dicha magnitud medida y(t) y una salida que produce dicha señal de mando u(t), siendo entonces la función de transferencia entre la entrada de consigna del corrector y la magnitud medida H(z -1)/W(z -1); caracterizado porque se filtra una señal de consigna sinusoidal (30) que presenta una pulsación wc para aplicar una señal de consigna filtrada c'(t) a la entrada de consigna de dicho corrector (20); siendo el filtrado de la señal de
20 consigna adaptativo, y porque: -se simula el comportamiento del conjunto formado por el corrector y por el simulador de movimiento por medio de una función de transferencia H(z -1)/W(z -1) con objeto de producir una magnitud medida ideal ym(t);
25 -se estima la atenuación At y el desfase ϕ residuales entre el movimiento real y(t) del simulador de movimiento y la magnitud medida ideal ym(t) a partir de la magnitud medida real y(t) y de la magnitud medida ideal ym(t);
- se determina dicho numerador Rr(z -1) en función de la pulsación wc tomada como parámetro, de la atenuación y del desfase residuales determinados en la 30 etapa de estimación, por resolución en línea del sistema de ecuación:
**(Ver fórmula)**
**(Ver fórmula)**
- se adapta el filtrado de la consigna con el valor determinado de Rr(z -1).
8. Procedimiento de condicionado según la reivindicación 7, caracterizado porque dicha etapa de estimación de la atenuación y del desfase residuales se basa en un algoritmo de identificación recursivo, por ejemplo, un algoritmo de los mínimos cuadrados.
9. Procedimiento de condicionado según una de las reivindicaciones 6 a 8,
caracterizado porque comprende una etapa inicial de estimación de la pulsación de dicha 10 señal de consigna.
10. Procedimiento de condicionado según la reivindicación 9, caracterizado porque dicha etapa de estimación de la pulsación se basa en un algoritmo de identificación recursivo, por ejemplo, un algoritmo de los mínimos cuadrados generalizados.
11. Procedimiento de condicionado según una de las reivindicaciones 6 a 10, caracterizado porque se pone en práctica mediante un programa informático que comprende una serie de instrucciones adecuadas para ser cargadas en la memoria de un ordenador y para ser ejecutadas por el calculador de dicho ordenador para generar una
20 señal de mando u(t) del simulador de movimiento.
Patentes similares o relacionadas:
Sistemas y métodos para la predicción rápida del agrietamiento inducido por hidrógeno (HIC) en tuberías, recipientes de presión y sistemas de tuberías, y para tomar medidas en relación con el mismo, del 13 de Mayo de 2020, de SAUDI ARABIAN OIL COMPANY: Un metodo para llevar a cabo evaluaciones de idoneidad para el servicio para una region de un activo que tiene una tasa de crecimiento de dano inducido por hidrogeno, el […]
Método y sistema para proporcionar resultados de analítica de datos, del 8 de Enero de 2020, de SIEMENS AKTIENGESELLSCHAFT: Método para proporcionar resultados de analítica de datos para un procedimiento realizado en una planta industrial, comprendiendo dicho método: (a) proporcionar […]
Procedimiento combinado para detectar anomalías en un sistema de distribución de agua, del 8 de Enero de 2020, de SUEZ Groupe: Un procedimiento para detectar anomalías en un sistema de distribución de agua compuesto por una red de nodos, comprendiendo dicho […]
Desarrollo de un modelo superior, del 25 de Diciembre de 2019, de KAESER KOMPRESSOREN SE: Procedimiento para el control y/o monitorización de una instalación de compresor que comprende uno o varios compresores y uno o varios dispositivos […]
Desarrollo de un modelo superior para el control y/o monitorización de una instalación de compresor, del 25 de Diciembre de 2019, de KAESER KOMPRESSOREN SE: Procedimiento para el control y/o monitorización de una instalación de compresor que comprende uno o varios compresores y uno o varios dispositivos periféricos […]
Entrada de diagrama de tuberías e instrumentación para un proceso de control y/o supervisión de un sistema de compresor, del 6 de Noviembre de 2019, de KAESER KOMPRESSOREN SE: Procedimiento para el control y/o supervisión de una instalación de compresores que comprende uno o varios compresores y uno o varios […]
Procedimiento para la resolución de una tarea de control en una instalación de proceso, del 16 de Octubre de 2019, de Z & J Technologies GmbH: Procedimiento para la resolución de una tarea de control en una instalación de proceso, en particular para el paso de la instalación de proceso de un estado […]
Sistema de monitorización, del 12 de Junio de 2019, de BAE SYSTEMS PLC: Un método implementado por ordenador para diseñar un sistema de gestión de la salud para la monitorización del estado de una plataforma, […]