APARATO Y METODO PARA DETERMINAR RETARDADOS DE GRUPO DE RECEPTORES EN UN SISTEMA DE MULTILATERACION.
Aparato (12) para identificar qué receptor en una pluralidad de receptores en posiciones conocidas en un sistema de multilateración (1) experimenta un retardo de grupo significativo caracterizado porque comprende para una primera pasada y pasadas subsiguientes:
medios (22) para determinar a partir de un primer grupo de receptores (2, 3, 5, 6) una posición detectada de una fuente de señal;
medios (22) para determinar a partir de la posición detectada y las posiciones conocidas de un receptor o receptores de un segundo grupo (3, 4, 5, 6) un tiempo de llegada previsto de la señal para el segundo grupo;
medios (22) para comparar la diferencia prevista en el tiempo de llegada con una diferencia real en el valor de tiempo de llegada al segundo grupo para derivar una diferencia entre diferencias de tiempo de llegada;
medios (22) para derivar una variación en diferencia sucesiva entre diferencias de tiempo de llegada; y
medios (22) para determinar cuándo hay una variación significativa en la diferencia entre diferencias de tiempo de llegada
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/062073.
Solicitante: ROKE MANOR RESEARCH LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: ROKE MANOR, OLD SALISBURY LANE,ROMSEY, HAMPSHIRE SO51 0ZN.
Inventor/es: FISHER,JAMES JOSEPH,ROKE MANOR RES. LTD, GALLOWAY,PHILIP EDWARD ROY,ROKE MANOR RES. LTD, QUILTER,TIMOTHY JOHN,ROKE MANOR RES. LTD, WEEDON,ROBERT JOHN,ROKE MANOR RES. LTD.
Fecha de Publicación: .
Fecha Concesión Europea: 17 de Marzo de 2010.
Clasificación Internacional de Patentes:
- G01S5/02A3
Clasificación PCT:
- G01S5/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › usando ondas de radio (G01S 19/00 tiene prioridad).
Fragmento de la descripción:
Aparato y método para determinar retardos de grupo de receptores en un sistema de multilateración.
La presente invención hace referencia a un sistema de multilateración para determinar una posición de un objeto.
Los sistemas de multilateración se utilizan para proporcionar, en particular, la posición de una aeronave en vuelo o en pistas de aeropuertos. Una señal transmitida por un transmisor en la aeronave es recibida por una serie de estaciones receptoras conocidas, en ubicaciones conocidas. La señal se transmite mediante un transpondedor de Radar Secundario de Vigilancia (SSR, por sus siglas en inglés) en 1090 MHz y es una de una serie de tipos de códigos o formatos Modo A/C y modo S conocidos. Al comparar el tiempo de llegada de la señal a cada una de las estaciones receptoras, y con el conocimiento de sus ubicaciones, es posible calcular la posición de la aeronave en el momento de la transmisión. Dicho sistema y una técnica de multilateración se describen en la patente GB2250154.
Cabe destacar que para determinar con precisión la posición, es necesario cubrir variaciones en la longitud aparente del trayecto entre partes del sistema. Esto se necesita para poder derivar diferencias importantes en valores de tiempo de llegada de la señal. Esto puede dar lugar a un factor llamado tiempo de retardo de grupo. El desgaste de los componentes, por ejemplo, puede provocar una variación en el tiempo de retardo de grupo que puede requerir mantenimiento de las piezas del sistema u otro tipo de medida correctiva.
La memoria EP-A-1045256 revela un sistema para localizar una fuente de señal móvil utilizando las demoras (retardos) en la recepción de señales en una serie de receptores en ubicaciones conocidas.
La memoria US-B1-6360078 revela un método para compensar retardos de grupo en receptores de una red que sirve para determinar la posición de una fuente de señal móvil.
La presente invención surgió como un intento de determinar qué receptor en un grupo de receptores en un sistema de multilateración experimentaba un retardo de grupo significativo.
De acuerdo a la presente invención, se proporciona un aparato para identificar qué receptor en una pluralidad de receptores en posiciones conocidas en un sistema de multilateración experimenta un retardo de grupo significativo, caracterizado porque comprende para una primera pasada y la subsiguiente: medios para determinar a partir de un primer grupo de receptores una posición detectada de una fuente de señal; medios para determinar a partir de la posición detectada y las posiciones conocidas de un receptor o receptores de un segundo grupo una diferencia prevista en valores de tiempo de llegada para la señal para el segundo grupo; medios para comparar la diferencia prevista en el valor de tiempo de llegada con una diferencia real en el valor de tiempo de llegada del segundo grupo para derivar una diferencia en diferencia de tiempo de llegada; medios para derivar una variación en diferencia sucesiva en diferencias de tiem-po de llegada; y medios para determinar cuándo hay una variación significativa en la diferencia en tiempo de llegada.
De manera preferente, se proporcionan medios para asignar receptores al primer y segundo grupo. En la realización preferente los receptores se asignan de manera tal que todos los receptores participen en el primer grupo y también el segundo grupo.
Los inventores han determinado que cuando se experimenta la variación más baja entonces el receptor en el segundo grupo es el que tiene el mayor error de desviación. Esto se debe a que el primer grupo se utiliza para proporcionar la información de posición, lo que no implica la utilización del receptor que presenta un mal rendimiento. Este receptor puede ser sometido a un ajuste o mantenimiento según sea necesario, o el error puede compensarse dentro del procesamiento.
La invención también proporciona un método.
A continuación se describirá una realización específica de la invención, sólo a modo de ejemplo, con referencia a las figuras, en las cuales:
La figura 1 muestra un sistema de multilateración y aparato según la invención;
La figura 2 es un diagrama de los pasos en un método según la invención;
La figura 3 es una figura explicativa que muestra varios agrupamientos de los receptores en el sistema de multilateración;
La figura 4 es un diagrama de los pasos realizados en el método; y
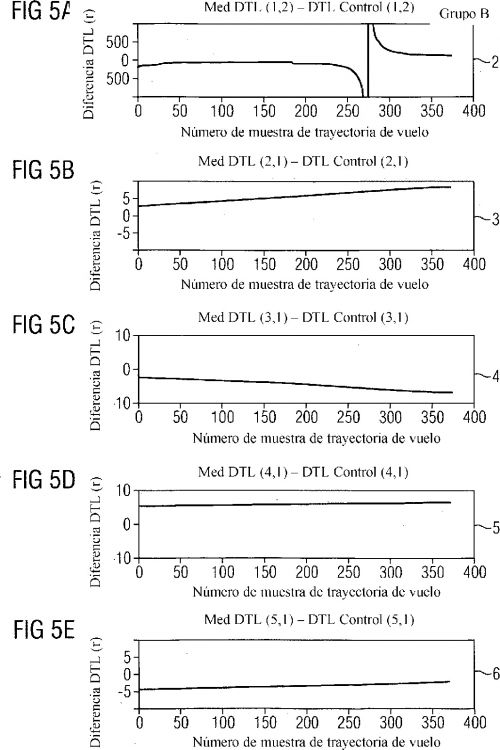
La figura 5 muestra grupos de variaciones en diferencia en diferencias de tiempo de llegada para varios agrupamientos de receptores.
Como se muestra en la figura 1, un sistema de multilateración 1 incluye cinco receptores 2 a 6 conectados por enlaces de comunicaciones 7 a 11 (fibra óptica) que forman una Red de Area Amplia a un subsistema de procesamiento central 12. Cada receptor es nominalmente idéntico y comprende, como se muestra en el receptor 2, una sección de recepción 13 que detecta y convierte una señal RF recibida transmitida desde una aeronave 14 en una forma que sea apropiada para su digitalización en un digitalizador 15. El digitalizador 15 realiza una conversión de analógico a digital, y un extractor de código 15a, en búsqueda de un código SSR en particular, detecta el código en una ventana de tiempo y transmite una señal digital por el trayecto de comunicaciones al subsistema de procesamiento central 12 indicando el tiempo de llegada del código en la ventana. Dentro de cada receptor hay una demora asociada con las secciones 13, 15 y 15a llamada retardo de grupo. Esto produce un error en el tiempo de llegada determinado de una señal. A medida que los componentes se desgastan es posible que este error se vuelva significativo, y el objetivo de la invención es detectar esta situación. Una técnica de multilateración de un tipo conocido se aplica a estos valores de tiempo de llegada para determinar la posición de la aeronave 14 y esto se lleva a cabo mediante el subsistema de procesamiento central 12.
El subsistema de procesamiento central 12 se representa aquí como una unidad separada pero puede estar co-ubicado en uno de los receptores. Incluye una serie de puertos conectados a los enlaces de comunicaciones 7 a 11. Los puertos se acoplan a través de filtros 16 a 20 a un correlador 21. Estos filtros eliminan ruidos de las señales que pueden llevar a errores posicionales. El correlador 21 correlaciona los datos de tiempo de llegada en una serie de conjuntos que contienen grupos de respuestas que pueden originarse a partir de la misma transmisión.
Los conjuntos correlacionados se acoplan a un procesador 22 que realiza una multilateración para derivar una posición de la aeronave 2 de manera conocida y pasa los datos de posición a una aplicación de rastreo 23 que muestra la posición a un controlador de tráfico aéreo.
El procesador 22 también proporciona una salida a un sistema de alerta 24 que proporciona una alarma cuando se detecta un retardo de grupo anormal en uno de los receptores. De manera alternativa, el efecto del retardo de grupo puede eliminarse dentro de la técnica de multilateración realizada por el procesador 22. La detección del retardo de grupo se realiza mediante una aplicación que se ejecuta en el procesador 22 como se describirá a continuación con referencia a la figura 2.
En un primer paso 25, los receptores se asignan a dos grupos, grupo A y grupo B. Cuatro de los cinco receptores se asignan al grupo A y uno al grupo B. En este caso el grupo A se muestra en la figura 3a e incluye los receptores 2, 3, 5 y 6. El grupo B incluye el receptor 4.
Las salidas de los receptores del grupo A se utilizan para calcular una posición para una aeronave 14 en el paso 26.
La posición calculada se utiliza para determinar, en el paso 27, una diferencia prevista en tiempo de llegada para el receptor 4 del grupo B, utilizando un receptor del grupo A como referencia. A continuación, en el paso 28, se calcula una diferencia en diferencia de tiempo de llegada tomando los módulos de la diferencia prevista en tiempo de llegada utilizando un receptor del grupo A como referencia menos la diferencia real detectada en tiempo de llegada utilizando el mismo receptor del grupo A como referencia.
La diferencia en el valor de diferencia de tiempo de llegada se registra en un conjunto de valores almacenados en la memoria en el paso 29.
A continuación, se crea un nuevo grupo como se muestra en la figura 3(b). Se observará que el grupo A ahora incluye los receptores 3, 4, 5 y 6 y el grupo B incluye el receptor...
Reivindicaciones:
1. Aparato (12) para identificar qué receptor en una pluralidad de receptores en posiciones conocidas en un sistema de multilateración (1) experimenta un retardo de grupo significativo caracterizado porque comprende para una primera pasada y pasadas subsiguientes:
2. Aparato (12) según la reivindicación 1 en donde el agrupamiento de receptores varía entre pasadas.
3. Aparato (12) según la reivindicación 2 en donde el segundo grupo está formado por un receptor de la pluralidad.
4. Aparato (12) según la reivindicación 3 en donde cada uno de la pluralidad de receptores (2-6) forma, para al menos una pasada, el segundo grupo.
5. Aparato (12) según la reivindicación 1 en donde los medios para determinar cuándo hay una variación significativa en la diferencia en tiempo de llegada comparan la variación con uno de los umbrales y/o una variación derivada de al menos una pasada anterior.
6. Aparato según cualquier reivindicación precedente que comprende un filtro o filtros para filtrar ruidos de la información de tiempo de llegada recibida de los receptores.
7. Aparato según la reivindicación 6 en donde el o cada filtro es un filtro de Kalman.
8. Método para determinar qué receptor de una pluralidad de receptores (2-6) de ubicaciones conocidas en un sistema de multilateración (1) experimenta un retardo de grupo significativo caracterizado porque comprende los pasos de:
9. Método según la reivindicación 8 que comprende los pasos de:
Patentes similares o relacionadas:
SISTEMA Y PROCEDIMIENTO DE ESTIMACIÓN DE POSICIÓN DE NAVE ESPACIAL, del 27 de Diciembre de 2011, de SES ASTRA S.A.: Un sistema para estimar una posición de nave espacial , que incluye una pluralidad de estaciones receptoras dispuestas para recibir señales transmitidas desde […]
 METODO DE PROCESAMIENTO DE SEÑALES DE POSICIONAMIENTO, EN PARTICULAR PARA APLICACIONES DE INTERIORES, del 4 de Noviembre de 2010, de AGENCE SPATIALE EUROPEENNE: - Un método de procesamiento de un conjunto de señales de posicionamiento moduladas por código constituido por una superposición de señales individuales […]
METODO DE PROCESAMIENTO DE SEÑALES DE POSICIONAMIENTO, EN PARTICULAR PARA APLICACIONES DE INTERIORES, del 4 de Noviembre de 2010, de AGENCE SPATIALE EUROPEENNE: - Un método de procesamiento de un conjunto de señales de posicionamiento moduladas por código constituido por una superposición de señales individuales […]
 SINTONIZACION SINCRONICA AUTOMATICA DE RECEPTORES DE BANDA ESTRECHA DE UN SISTEMA DE POSICIONAMIENTO INALAMBRICO PARA SEGUIMIENTO DE CANAL DE VOZ/TRAFICO, del 10 de Diciembre de 2009, de TRUEPOSITION, INC.: Un método para utilizar en un sistema de localización inalámbrica para localizar un transmisor inalámbrico utilizando múltiples receptores de banda estrecha, […]
SINTONIZACION SINCRONICA AUTOMATICA DE RECEPTORES DE BANDA ESTRECHA DE UN SISTEMA DE POSICIONAMIENTO INALAMBRICO PARA SEGUIMIENTO DE CANAL DE VOZ/TRAFICO, del 10 de Diciembre de 2009, de TRUEPOSITION, INC.: Un método para utilizar en un sistema de localización inalámbrica para localizar un transmisor inalámbrico utilizando múltiples receptores de banda estrecha, […]
 METODO Y APARATO PARA CONTROLAR UNA FUENTE DE FRECUENCIA, del 1 de Diciembre de 2009, de ROKE MANOR RESEARCH LIMITED: Un método para determinar un desfase de tiempo de un reloj local en un receptor , que consiste en recibir una señal desde una fuente externa en un primer […]
METODO Y APARATO PARA CONTROLAR UNA FUENTE DE FRECUENCIA, del 1 de Diciembre de 2009, de ROKE MANOR RESEARCH LIMITED: Un método para determinar un desfase de tiempo de un reloj local en un receptor , que consiste en recibir una señal desde una fuente externa en un primer […]
Método y sistema computarizados de seguimiento y advertencia de proximidad para el personal, la planta y el equipo que funcionan tanto por encima como por debajo del suelo o su movimiento entre ellos, del 1 de Julio de 2020, de EMB Safety Helmet Pty Ltd: Un sistema informatizado de advertencia de proximidad y seguimiento de seguridad para el personal , la planta y el equipo […]
CASCO INTELIGENTE PARA MOTOS, del 19 de Junio de 2020, de JURADO SECO, Sacha: 1. Casco inteligente para motos, caracterizado porque está formado por un casco de moto con conectividad, que incorpora un micrófono , auriculares , cámaras de […]
Método y dispositivo para mejorar la determinación de la posición, del 27 de Mayo de 2020, de DEUTSCHE TELEKOM AG: Método para mejorar la determinación de la posición de un dispositivo de comunicación móvil, con las siguientes etapas de método: a) proporcionar una información […]
Localización de una baliza de emergencia, del 20 de Mayo de 2020, de THALES: Un procedimiento implementado por ordenador para procesar la señal transmitida por una baliza de emergencia, siendo recibida dicha señal por […]