VEHICULO ROBOTICO MODULAR TRANSPORTABLE POR HUMANOS PARA MISIONES DE ALTO RIESGO.
1. Vehículo robótico modular transportable por humanos para misiones de alto riesgo,
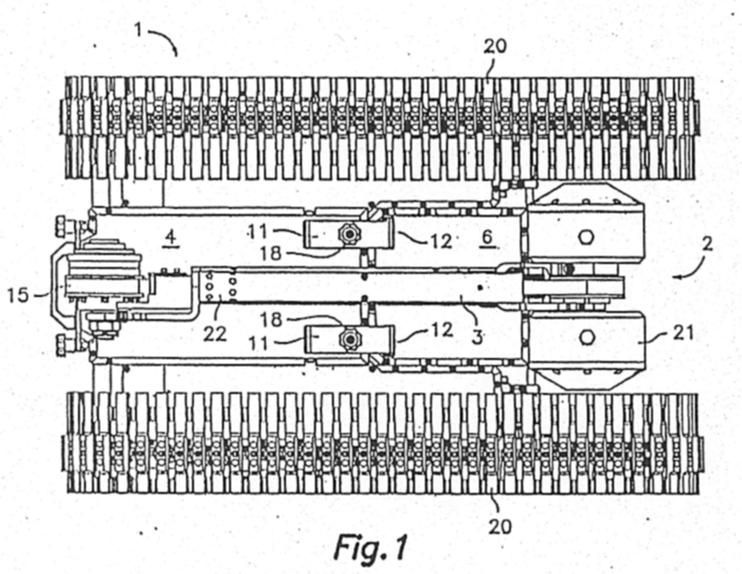
del tipo que comprende una plataforma robótica (1) dotada de unos medios de desplazamiento y unos medios de control, y al menos una unidad de trabajo (2) equipada con unos medios robóticos de manejo de herramientas y/u otros instrumentos y configurada para acoplarse operativamente de manera liberable a dicha plataforma robótica (1), caracterizado porque:#la plataforma robótica (1) comprende un cuerpo de plataforma (4) en el que está formada una zona rebajada (5) dimensionada para alojar al menos en parte un cuerpo base (6) de dicha unidad de trabajo (2);#en dicha zona rebajada (5) de dicho cuerpo de plataforma (4) están dispuestos unos primeros elementos o configuraciones de guía (7) adaptados para cooperar con unos segundos elementos o configuraciones de guía (8) dispuestos en dicho cuerpo base (6) de dicha unidad de trabajo (2) para permitir un acoplamiento deslizante del cuerpo base (6) de la unidad de trabajo (2) en la zona rebajada (5) del cuerpo de plataforma (4);#en la zona rebajada (5) del cuerpo de plataforma (4) está instalado un primer conector eléctrico (9) y en el cuerpo base (6) de la unidad de trabajo (2) está instalado un segundo conector eléctrico (10) configurado y dispuesto para acoplarse con dicho primer conector eléctrico (9) cuando el cuerpo base (6) de la unidad de trabajo (2) es instalado en la zona rebajada (5) del cuerpo de plataforma (4); y#en el cuerpo de plataforma (4) está dispuesto al menos un primer miembro o configuración de retención (11) adaptado para cooperar con al menos un segundo miembro o configuración de retención (12) dispuesto en el cuerpo base (6) de la unidad de trabajo (2) para retener mecánicamente el cuerpo base (6) de la unidad de trabajo (2) instalado en la zona rebajada (5) del cuerpo de plataforma (4) con el primer conector eléctrico (9) conectado al segundo conector eléctrico (10).#2. Vehículo robótico, de acuerdo con la reivindicación 1, caracterizado porque dichos primeros elementos o configuraciones de guía (7) comprenden unos nervios (7) que se extienden desde unas paredes laterales (5a) y por encima de una pared de fondo (5b) de la zona rebajada (5) del cuerpo de plataforma (4), y dichos segundos elementos o configuraciones de guía (8) comprenden una superficie inferior del cuerpo base (6) de la unidad de trabajo (2) para hacer contacto con dicha pared de fondo (5b) de la zona rebajada (5) del cuerpo de plataforma (4) y unas ruedas (8) instaladas en unas paredes laterales (6a) del cuerpo base (6) de la unidad de trabajo (2) para rodar sobre unas superficies inferiores de dichos nervios (7).#3. Vehículo robótico, de acuerdo con la reivindicación 2, caracterizado porque dicho primer conector eléctrico (9) es un conector hembra múltiple para señales y potencia y dicho segundo conector eléctrico (10) es un conector macho múltiple para señales y potencia configurado para acoplarse con el primer conector eléctrico (9) medianteun movimiento en una dirección paralela a la dirección de los nervios (7).#4. Vehículo robótico, de acuerdo con la reivindicación 2, caracterizado porque dicho primer miembro o configuración de retención (11), que es al menos uno, comprende una traba (11) fijable al cuerpo de plataforma (4) por un dispositivo de fijación (13), teniendo dicha traba (11) una porción que se extiende en voladizo sobre la zona rebajada (5) y una protuberancia (14) en el extremo de dicha porción en voladizo, y dicho segundo miembro o configuración de retención (12) comprende una cavidad (12) formada en una superficie del cuerpo base (6) y configurada para recibir dicha protuberancia (14) cuando la traba (11) está fijada al cuerpo de plataforma (4).#5. Vehículo robótico, de acuerdo con la reivindicación 4, caracterizado porque dicho dispositivo de fijación (13) comprende un vástago roscado (16) fijado al cuerpo de plataforma (4) y pasado a través de un agujero alargado (17) formado en la traba (11), y una tuercade pomo (18) acoplada a dicho vástago roscado (16) y dispuesta para presionar sobre la traba (11).#6. Vehículo robótico, de acuerdo con la reivindicación 5, caracterizado porque la traba (11) tiene una porción de sujeción alojada con posibilidad de movimiento en un rebaje (19) formado en el cuerpo de plataforma (4) adyacente a la zona rebajada (5), y dicho agujero alargado (17) está formado en dicha porción de sujeción de la traba (11).
Tipo: Resumen de patente/invención.
Solicitante: AQUILES ROBOTICS SYSTEMS, S.L.
Nacionalidad solicitante: España.
Provincia: BARCELONA.
Inventor/es: MATUTANO,JOAN, MARTORELL,JOAN, PAVON,ANGEL.
Fecha de Solicitud: 28 de Junio de 2007.
Fecha de Publicación: .
Fecha de Concesión: 18 de Junio de 2008.
Clasificación PCT:
- B25J5/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00).
- F42B33/06 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F42 MUNICIONES; VOLADURA. › F42B CARGAS EXPLOSIVAS, p. ej. PARA VOLADURA; FUEGOS ARTIFICIALES; MUNICIONES (composiciones explosivas C06B; espoletas para municiones F42C; voladura F42D). › F42B 33/00 Fabricación de municiones; Desmontaje de municiones; Aparatos para ello (F42B 5/188 tiene prioridad; procedimientos de fabricación de cargas huecas F42B 1/036; fabricación de iniciadores para cartuchos de voladura F42B 3/195). › Desmontaje de espoletas, de cartuchos, de proyectiles, de cohetes o de bombas (F42B 33/04 tiene prioridad).
Patentes similares o relacionadas:
Sensores de pista para detectar la posición del vehículo con respecto a las pistas, del 15 de Julio de 2020, de Autostore Technology AS: Un método para rastrear la posición de un vehículo operado remotamente siguiendo una ruta establecida en relación con las pistas establecidas en una estructura de marco que forma […]
SISTEMA Y PROCEDIMIENTO PARA EL RECAMBIO DE REVESTIMIENTOS, CUYA CONFIGURACIÓN PERMITE RETIRAR E INTRODUCIR, EN FORMA AUTOMATIZADA, REVESTIMIENTOS DE UN MOLINO UTILIZADO PARA LA MOLIENDA DE MINERAL, del 2 de Julio de 2020, de MI ROBOTIC SOLUTIONS S.A: Un sistema y procedimiento para el recambio de revestimientos de un molino, cuya configuración permita la manipulación automatizada y robótica […]
Procedimiento de tratamiento de una superficie, y autómata correspondiente, del 20 de Mayo de 2020, de Les Companions: Procedimiento de tratamiento de una superficie a tratar, por medio de un autómata que consta de: - una base configurada para […]
Manipulador de alimentos en un almacén, del 13 de Mayo de 2020, de Imaginalis S.r.l: Un manipulador de alimentos (1a) en un almacén ; comprendiendo dicho almacén una pluralidad de estaciones de almacenamiento (1b) en las que […]
Mecanismo de despliegue para normalización pasiva de un instrumento con relación a la superficie de una pieza de trabajo, del 1 de Enero de 2020, de SAUDI ARABIAN OIL COMPANY: Un aparato que se configura para transportar un instrumento y desplegar opcionalmente el instrumento en relación con una superficie que comprende: […]
Fabricación de producción ultraflexible, del 13 de Noviembre de 2019, de ABB SCHWEIZ AG: Un sistema de fabricacion que comprende: una pluralidad de celdas de trabajo , donde cada una de dichas celdas realiza uno o mas procesos […]
Aparato de distribución de carga de rueda magnética, del 21 de Agosto de 2019, de Tas Global Co., Ltd: Un aparato para limpiar el fondo de un barco en el que un aparato de distribución de carga comprende: una pluralidad de ruedas magnéticas para […]
Cortadora de alto rendimiento con pinza adaptada por unión de materiales, del 7 de Agosto de 2019, de GEA Food Solutions Germany GmbH (100.0%): Cortadora de alto rendimiento que presenta una cuchilla que corta lonchas de producto alimenticio de uno de los extremos de […]