PERFECCIONAMIENTOS EN EL MANDO AUTOMÁTICO DE LOCOMOTORAS ELÉCTRICAS.
Perfeccionamientos en el mando automático de locomotoras eléctricas,
especialmente con el fin de simplificar sus equipos, reducir su volumen y precio, aumentar la flexibilidad y el poder de adaptación de tales vehículos y realizar de un modo muy completo un programa que implica numerosas operaciones de distinta naturaleza, perfeccionamientos que se distinguen notablemente por las características siguientes que pueden tomarse por separado o en combinación.
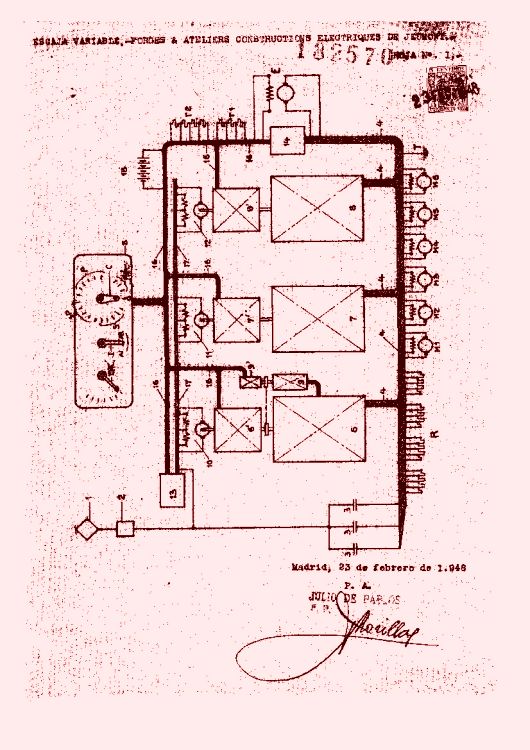
A).- Los contactos del equipo se agrupan y asocian de acuerdo con sus respectivas funciones, de modo a constituir por lo menos tres combinadores separados, previstos para funciones diferentes y cada uno de ellos arrastrado en ambos sentidos por servo-motores individuales, autónomos desde el punto de vista mecánico, pero conectados entre sí mediante circuitos y relevadores de mando y de servicio.
B).- Estos circuitos y relevadores de servicio dependen de uno o varios manipuladores, estando dispuestos de manera que producen movimientosautomáticos y acoplados de los diversos combinadores, que podrán efectuarse simultánea o sucesivamente en un solo sentido o en ambos sentidos según la maniobra impuesta por el manipulador en servicio.
C).- Un primer combinador consta de los contactores previstos para los diferentes acoplamientos de los motores de tracción (en serie, serie-paralelo, o paralelo); un segundo está provisto de los que actuan sobre los inductores de dichos motores para efectuar la puesta en derivación o la excitación separada durante el frenado por recuperación; un tercero lleva los contactores que controlan las resistencias de arranque, de frenado y de regulación.
D).- Cada uno de los combinadores parciales consta, aparte de los contactos principales que operan sobre los circuitos de tracción, de varios grupos de dedos y segmentos de servicio y de mando conectados entre sí, así como con los contactos del manipulador; bien directamente, o por mediación de relevadores, constituyendo estas conexiones circuitosauxiliares recorridos por corrientes que ponen en marcha o detienen a los servo-motores reversibles de los diversos combinadores según las posiciones y los desplazamientos de las manecillas del manipulador.
E).- El inversor dotado, como los combinadores, de una parte prevista para las corrientes de tracción y una parte de servicio, es impulsado mecánicamente por movimientos apropiados del combinador de acoplo.
F).- El manipulador lleva una manecilla de arranque y de regulación, una manecilla de inversión y una manecilla de esfuerzo, las cuales actuan, en marcha, sobre el relevador de aceleración y, en recuperación, sobre la intensidad de la corriente de frenado.
G).- La progresión y regresión normal de los contactos se verifica mediante el funcionamiento conjunto del combinador de acoplamiento y del combinador reostático, cada uno de los cuales está provisto a tal efecto de un grupo de dedos y de segmentos de progresión y un grupo correspondiente de regresión.
H).- Los grupos respectivos de progresión y de regresión son puestos en servicio, según la maniobra a realizar, por un relevador de agujas que actua sobre los circuitos de servicio y de mando.
I).- Durante el paso de uno a otro acoplamiento por el método de puente, el combinador reostático se controla para que intervenga automáticamente a fin de equilibrar el esquema de transición.
J).- El número de amperio-giros del relevador de aceleración es más o menos modificado por la manecilla de esfuerzo del manipulador y eventualmente por los desplazamientos del combinador de puesta en derivación.
K).- El relevador de aceleración puede ser desconectado por los relevadores de patinaje.
L).- Los relevadores de patinaje se disponen para su actuación sobre los circuitos de servicio y de mando, a fin de detener la progresión del arranque, controlar la regresión de combinadores, reducir la corriente de frenado o disparar los contactos principales.
M).- El combinador de puesta en derivación se regula para que noarranque más que en el caso en que el combinador reostático se encuentre sobre su último contacto y a condición de que existe concordancia entre la posición de la manecilla de mando y del manipulador de acoplo.
N).- La disposición automática para efectuar la puesta en derivación es la siguiente: -cuando el combinador de acoplo alcanza la posición indicada por la manecilla del manipulador, el combinador reostático abandona su último contacto y retrocede un poco para insertar una parte de las resistencias en los circuitos de los motores, luego hace avanzar el espacio de un contacto al combinador de puesta en derivación y por último elimina progresivamente dichas resistencias.
O).- El funcionamiento expuesto en (N.) podrá depender del relevador de aceleración; queda controlado por el juego alterno de los dedos de progresión y de regresión y del relevador de agujas.
P).- Por mediación de los enclavamientos indicados en (M.), podrá pasarse sobre un contacto de derivación de un acoplamiento superior sin pasar por los contactos de derivación de los acoplamientos inferiores.
Q).- Los circuitos de servicio se disponen para que efectúen el retroceso progresivo desde un contacto puesto en derivación hacia una posición no puesta en derivación, de un acoplamiento inferior, llevando automáticamente a cero al combinador, que puesto en derivación, en tanto que el relevador de agujas alimenta los dedos de regresión sobre los otros combinadores, de manera que efectúen conjuntamente la regresión controlada en el orden apetecido.
R).- Para la vuelta desde la posición, en derivación, o no, hacia una posición más fuerte en derivación en uno acoplamiento inferior, se hace intervenir un grupo de dedos auxiliares sobre el combinador reostático, dispuestos sobre el mando del combinador de puesta en derivación, de tal modo que el combinador reostático, al insertar progresivamente las resistencias haga progresar paulatinamente y paso a paso al combinador de puesta en derivación hacia la posición deseada.
S).- Mediante adecuadas maniobras sobre la manecilla del manipulador, podrá verificarse el retroceso a cero lenta o rápidamente, haciendo intervenir de diferentes modos los circuitos de servicio, y los dedos y segmentos de regresión.
T).- Para mantener conectados a los contactores principales durante la rápida regresión, según (S), un relevador de tiempo de retén es periodicamente disparado por segmentos dispuestos entre los contactos del combinador de acoplo y del combinador reostático.
U).- Durante el establecimiento de los circuitos de recuperación, el combinador de puesta en derivación y de puesta en recuperación empalma primeramente los inductores en serie, sobre la excitatriz, tras lo cual el combinador de acoplo agrupa a los inducidos, no interviniendo el combinador reostático hasta que no se ha producido el cierre del circuito de recuperación.
V).- La manecilla que actua sobre el relevador de aceleración durante el arranque se utiliza durante el frenado pararegular la excitación del excitador.
La invención cubre igualmente, a título de nuevos modos operatorios, los diversos procedimientos combinados, automáticos o semi-automáticos, expuestos anteriormente y realizables por la aplicación de los medios descritos en combinación con los circuitos y relevadores de servicio y de mando
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P0182570.
Solicitante: FORGES ET ATELIERS DE CONSTRUCTIONS ELECTRIQUES DE JEUMONT, SOCIÉTÉ ANONYME.
Nacionalidad solicitante: Francia.
Fecha de Solicitud: 23 de Febrero de 1948.
Fecha de Publicación: .
Fecha de Concesión: 29 de Noviembre de 1948.
Clasificación antigua:
- B61 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › FERROCARRILES.