Volteador de cajas de doble cinta con rodillo pasivo.
Volteador de cajas comprendiendo:
una pareja de cintas transportadoras (14,
16) avanzando paralelamente en una dirección de transporte (18) e inclinadas hacia abajo la una hacia la otra;
un sistema motriz haciendo avanzar al par de cintas transportadoras con un diferencial de velocidad entre cada una de las cintas transportadoras;
caracterizado porque cada una de las cintas transportadoras tienen rodillos de soporte de artículos (20) de rotación libre en ejes (22) paralelos a la dirección de transporte (18).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/US2012/029632.
Solicitante: LAITRAM L.L.C..
Nacionalidad solicitante: Estados Unidos de América.
Dirección: 220 LAITRAM LANE HARAHAN, LOUISIANA 70123 ESTADOS UNIDOS DE AMERICA.
Inventor/es: FOURNEY,MATTHEW,L.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B65G47/244 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B65 TRANSPORTE; EMBALAJE; ALMACENADO; MANIPULACION DE MATERIALES DELGADOS O FILIFORMES. › B65G DISPOSITIVOS DE TRANSPORTE O ALMACENAJE, p. ej. TRANSPORTADORES PARA CARGAR O BASCULAR, SISTEMAS TRANSPORTADORES PARA TALLERES O TRANSPORTADORES NEUMATICOS DE TUBOS (embalajes B65B; manipulación de material delgado o filiforme, p. ej. hojas de papel o fibras B65H; grúas B66C; aparatos de elevación o arrastre,p. ej. montacargas, B66D; dispositivos para elevar o bajar mercancías para carga y descarga, p. ej. carretillas elevadoras, B66F 9/00; vaciado de botellas, jarras, latas, barricas, barriles o contendores similares, no previstos en otro lugar, B67C 9/00; distribución o trasvase de líquidos B67D; llenado o descarga de contenedores para gases licuados, solidificados o comprimidos F17C; sistemas de conducción para fluídos F17D). › B65G 47/00 Dispositivos para manipular objetos o materiales asociados con los transportadores; Métodos de empleo de los dispositivos. › haciéndolos girar alrededor de un eje sensiblemente perpendicular al plano de transporte.
PDF original: ES-2546161_T3.pdf
Descripción:
Volteador de cajas de doble cinta con rodillo pasivo Antecedentes La invención se relaciona, en general, con transportadores motorizados y, más particularmente, con una cinta transportadora y un método para voltear cajas usando cintas transportadoras. Los transportadores de volteo de cajas tradicionales usan dos cintas transportadoras paralelas desplazándose paralelamente entre ellas a diferentes velocidades. Cuando un paquete se proporciona y puentea a las dos cintas, la cinta más rápida empuja un lado del paquete hacia delante, haciendo rotar al paquete, desplazándose su borde delantero hacia la cinta más lenta. El paquete sigue rotando mientras se traslada a lo largo del transportador, descansando finalmente en la cinta más lenta y girado algo menos de 90°. El paquete se abre paso entonces hasta su orientación final y situación lateral gracias a un rail que se extiende cruzando el transportador. La WO 2011/034478 revela un volteador de cajas acorde al preámbulo de la reivindicación anexa 1. Por tanto, existe una necesidad de un volteador de cajas que pueda rotar los paquetes 90° completos en una corta distancia sin la necesidad de invertirlos. En un primer aspecto de la presente invención se proporciona un volteador de cajas comprendiendo: una pareja de cintas transportadoras avanzando paralelamente en una dirección de transporte e inclinadas hacia abajo la una hacia la otra.
un sistema motriz que haga avanzar al par de cintas transportadoras con un diferencial de velocidad entre cada una de las cintas transportadoras; se caracteriza porque cada una de las cintas transportadoras tiene rodillos de soporte de artículos de rotación libre en ejes paralelos a la dirección de transporte.
En otro aspecto de la presente invención se proporciona un método para rotar un artículo transportado, comprendiendo: hacer avanzar una pareja de cintas transportadoras paralelas inclinadas hacia abajo la una hacia la otra en una dirección de transporte;
transporte de un artículo que puentee la pareja de cintas transportadoras paralelas sobre rodillos de soporte de artículos en las cintas transportadoras, de rotación libre en ejes paralelos a la dirección de transporte; hacer avanzar al par de cintas transportadoras con un diferencial de velocidad entre cada una de ellas para hacer rotar al artículo durante su transporte en la dirección de desplazamiento. Breve descripción de los dibujos Estas propiedades y aspectos de la invención se ejemplifican más detalladamente en la siguiente descripción, las reivindicaciones adjuntas y los dibujos acompañantes, donde:
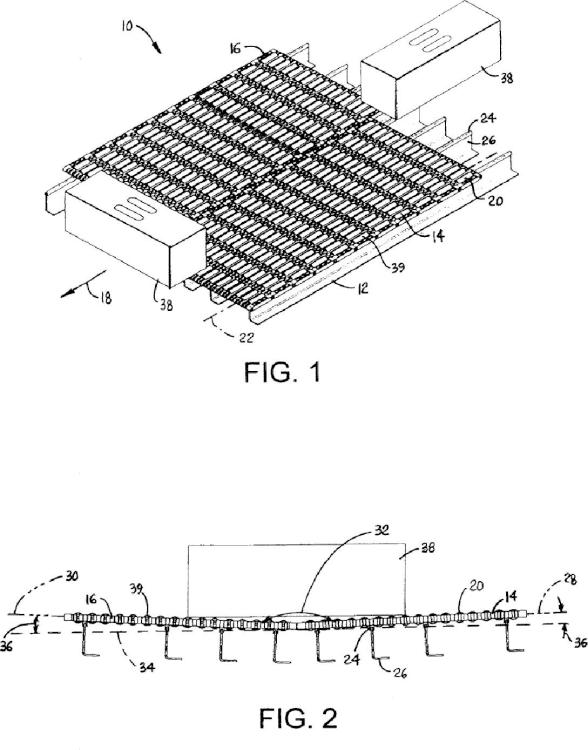
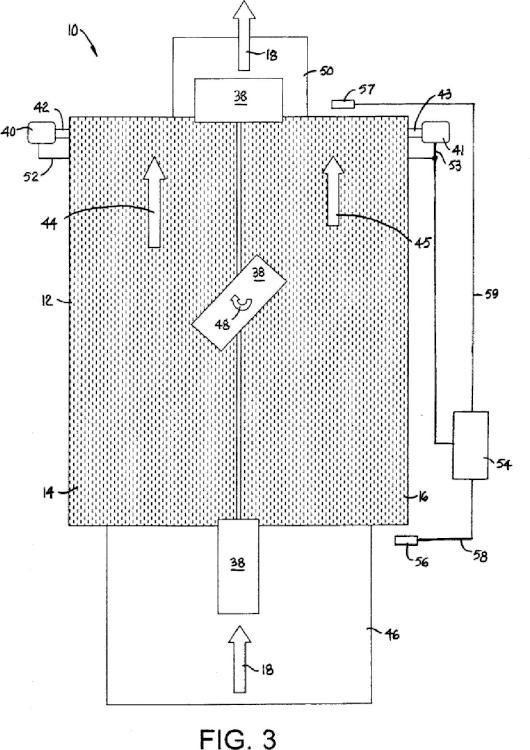
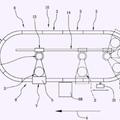
La FIG. 1 es una vista isométrica de una porción de un transportador volteador de cajas presentando rasgos de la invención; FIG. 2 es una vista transversal del transportador volteador de cajas de la FIG. 1 visto a lo largo de la línea 2-2 de la FIG. 1; y FIG. 3 es una vista de planta superior de la porción de vía de carga del transportador volteador de cajas de la FIG. 1. Descripción detallada En las FIGS. 1-3 se muestra una versión de un transportador volteador de cajas, o un volteador de cajas, . El volteador de cajas 10 se muestra desplazándose a lo largo de una porción de una vía de carga 12 de una trayectoria de cinta sinfín para la que no se muestra la vuelta. El volteador de cajas incluye una pareja de cintas transportadoras 2 5
14, 16 avanzando paralelamente en una dirección de transporte 18. Cada una de las cintas transportadoras tiene una serie de rodillos 20 de rotación libre en ejes de rodillo que definen ejes de rotación 22 paralelos a la dirección de transporte 18. Los rodillos no se rotan activamente; operan pasivamente, rotando sólo al entrar en contacto con los artículos transportados. Cada una de las cintas puede ser una cinta plana, una cinta de tablillas o una pareja de cadenas de rodillos flanqueando y soportando rodillos. O las cintas pueden ser cintas transportadoras plásticas modulares, como la cinta INTRALOX® Serie 7000 o la INTRALOX® Serie 400 TRT. Las cintas colindan entre ellas o están separadas por una brecha a lo largo de la línea central del transportador. Las cintas se soportan sobre cintas antidesgaste 24 montadas sobre raíles 26. Las cintas antidesgaste se colocan en espacios entre rodillos para permitir a los rodillos rotar libremente sobre sus ejes sin entrar en contacto con las cintas antidesgaste.
Los raíles 26 aumentan en altura al alejarse de la línea central del transportador, de forma que las cintas antidesgaste 24 soporten las cintas transportadoras 14, 16 en la trayectoria de carga en relación no coplanar. Cada cinta transportadora define un plano 28, 30 inclinado horizontalmente. Tal y como se muestra en la FIG. 2, los dos planos 28, 30 forman una V con un vórtice, o ángulo de intersección 32, que es obtuso de menos de 180°. Por ejemplo, un ángulo de intersección 32 de entre aproximadamente 176° y aproximadamente 178° funciona correctamente. Los planos mostrados también intersecan un plano horizontal 34 con un plano de inclinación 36. Por ejemplo, ángulos de inclinación de entre aproximadamente 1° y aproximadamente 2° funcionan a la perfección.
Los artículos, tales como cajas de fondo plano 38, pasean sobre los rodillos de soporte de artículos 20. Tal y como se muestra en la FIG. 2, los artículos de fondo plano que puentean las dos cintas 14, 16 se soportan sólo en los bordes de los artículos a causa de la inclinación hacia debajo de las cintas la una hacia la otra en la línea central. Las periferias 39 de los rodillos pueden tener una característica de alta fricción, tales como una superficie rugosa o una superficie de alta fricción hecha de goma de alta fricción, elastómero, u otro material resiliente, para adherirse bien a los artículos.
Tal y como se muestra en la FIG. 3, las cintas transportadoras las accionan por separado motores 40, 41, poleas de transmisión o dientes de engranaje (no mostrados) sobre ejes de accionamiento 42, 43. En este ejemplo, la cinta transportadora izquierda 14 opera a mayor velocidad 44 que la menor velocidad 45 de la cinta transportadora derecha 16. Un transportador de alimentación 46 proporciona el artículo 38 a las dos cintas transportadoras con cinta superior de rodillos 14, 16. Como la cinta transportadora izquierda 14 se hace avanzar más rápido que la derecha 16, el artículo se rota en sentido horario en torno a un eje vertical como el indicado por la flecha curvada 48 al transportarlo a lo largo del trayecto de transporte. Los rodillos de rotación libre facilitan la rotación proporcionando un contacto de rodadura con los artículos. La velocidad diferencial entre los dos transportadores se ajusta para asegurar que el artículo se rota 90°, o cualquier grado de rotación que se desee, al abandonar las dos cintas transportadoras 14, 16 sobre un transportador subsiguiente 50.
La menor velocidad 45 se ajusta de forma que concuerde con el ritmo global de la caja, es decir, la velocidad de flujo de los artículos sobre los transportadores de alimentación y subsiguiente 46, 50. La velocidad diferencial, es decir, la diferencia entre la mayor velocidad 44 y la menor velocidad 45, se ajusta para proporcionar el grado de rotación deseado que depende de la longitud de las dos cintas transportadoras 14, 16 a lo largo de la trayectoria de carga 12. La velocidad diferencial puede depender también de características físicas del artículo, como la forma de su fondo, su peso, y el coeficiente de rozamiento entre el fondo del artículo y los rodillos. Las velocidades de dos cintas pueden ajustarse en base al grado de rotación deseado y a la longitud conocida de las dos cintas. Pero las velocidades puede controlarlas automáticamente a través de líneas de control 52, 53 un controlador 54, que forme parte de un sistema motriz con los dos motores 40, 41, los ejes 42, 43, y las poleas o dientes de engranaje. La velocidad de flujo, la orientación de los artículos entrantes, y la orientación del artículo existente pueden detectarlas sensores de alimentación y de salida 56, 57, tales como sistemas de detección óptica o sistemas de visionado. Las señales de los sensores se envían al controlador 54 a través de líneas de señales 58, 59. El controlador puede utilizar las señales de los sensores para computar y ajustar las velocidades de las cintas transportadoras automáticamente de forma que concuerden con el ritmo global de flujo y alcancen el grado de rotación deseado del artículo.
Reivindicaciones:
1. Volteador de cajas comprendiendo:
una pareja de cintas transportadoras (14, 16) avanzando paralelamente en una dirección de transporte (18) e inclinadas hacia abajo la una hacia la otra;
un sistema motriz haciendo avanzar al par de cintas transportadoras con un diferencial de velocidad entre cada una de las cintas transportadoras;
caracterizado porque cada una de las cintas transportadoras tienen rodillos de soporte de artículos (20) de rotación libre en ejes (22) paralelos a la dirección de transporte (18) .
2. Volteador de cajas conforme a la reivindicación 1, en el que las periferias de los rodillos de soporte de artículos 10 están facricados con un material de alto rozamiento.
3. Volteador de cajas conforme a la reivindicación 1 ó 2 en el que el sistema motriz regula el diferencial de velocidad en función de la longitud del par de cintas transportadoras.
4. Volteador de cajas conforme a la reivindicación 1 ó 2 en el que el sistema motriz regula el diferencial de velocidad en función de las características físicas de un artículo transportado por la pareja de cintas transportadoras.
5. Volteador de cajas conforme a una de las anteriores reivindicaciones, en el que cada una de las cintas transportadoras de la pareja está inclinada horizontalmente en un ángulo de inclinación de entre aproximadamente 1° y aproximadamente 2°.
6. Método para rotar un artículo transportado (38) , comprendiendo:
hacer avanzar una pareja de cintas transportadoras paralelas (14, 16) inclinadas hacia abajo la una hacia la otra en 20 una dirección de transporte (18) ;
transporte de un artículo que puentea la pareja de cintas transportadoras paralelas (14, 16) sobre rodillos de soporte de artículos (20) en las cintas transportadoras de rotación libre en ejes (22) paralelos a la dirección de transporte (18) ;
hacer avanzar al par de cintas transportadoras (14, 16) con un diferencial de velocidad entre cada una de las cintas 25 transportadoras para hacer rotar al artículo (38) durante su transporte en la dirección de desplazamiento (18) .
7. Método conforme a la reivindicación 6 comprendiendo además el ajuste del diferencial de velocidad en función de la longitud de la pareja de cintas transportadoras paralelas.
8. Método conforme a la reivindicación 6 comprendiendo además el ajuste del diferencial de velocidad en función de una característica física del artículo.
Patentes similares o relacionadas:
Aparato y método para orientar el cierre de extremo de un recipiente de bebida y aplicación de símbolos en una ubicación predeterminada, del 29 de Abril de 2020, de BALL CORPORATION: Un método para orientar y decorar un cierre de extremo para un recipiente de bebida, que comprende: proporcionar el cierre de extremo que comprende un ribete […]
Aparato de transferencia para un final de línea de una plegadora-encoladora, del 3 de Julio de 2019, de VEGA S.r.l: Aparato de transferencia para un final de línea de una plegadora-encoladora para cajas de cartón, que comprende un lecho de transferencia […]
Transportador de recipientes para máquina, del 15 de Mayo de 2019, de Makro Labelling S.r.l: Un transportador que puede utilizarse desde o hacia una máquina para recipientes , que comprende: al menos un módulo base que tiene […]
Conjunto de rodillos multidireccionales, del 25 de Marzo de 2019, de LAITRAM L.L.C.: Un sistema (400, 500, 500', 900, 1200, 1300, 1400) transportador que comprende: una formación de conjuntos de rodillos multidireccionales […]
 Máquina transportadora para contenedores, del 13 de Febrero de 2019, de Makro Labelling S.r.l: Una máquina transportadora para contenedores , que comprende:
al menos un módulo base que tiene una longitud predeterminada a lo largo de una dirección […]
Máquina transportadora para contenedores, del 13 de Febrero de 2019, de Makro Labelling S.r.l: Una máquina transportadora para contenedores , que comprende:
al menos un módulo base que tiene una longitud predeterminada a lo largo de una dirección […]
Manipulador de piezas, del 18 de Enero de 2019, de DÜOTECHNICK MANUTENCION S.A: Manipulador de piezas que comprende: - un girador motorizado que comprende dos punteros paralelos y verticales accionados por un motor […]
Peine de transferencia y sistema de transferencia entre dos transportadores de cinta, del 5 de Octubre de 2018, de AFHER EUROBELT, S.A.: Peine de transferencia y sistema de transferencia entre dos transportadores de cinta. Un peine (100, 100') y un sistema de transferencia entre dos transportadores de […]
 Dispositivo y procedimiento de posicionamiento de productos, del 27 de Septiembre de 2018, de C.E.R.M.E.X. CONSTRUCTIONS ETUDES ET RECHERCHES DE MATERIELS POUR L'EMBALLAGE D'EXPEDITION: Dispositivo de posicionamiento para posicionar unos productos simultáneamente a su transporte, sobre un transportador unos detrás de otros en un […]
Dispositivo y procedimiento de posicionamiento de productos, del 27 de Septiembre de 2018, de C.E.R.M.E.X. CONSTRUCTIONS ETUDES ET RECHERCHES DE MATERIELS POUR L'EMBALLAGE D'EXPEDITION: Dispositivo de posicionamiento para posicionar unos productos simultáneamente a su transporte, sobre un transportador unos detrás de otros en un […]