Sistema de visualización in vivo.
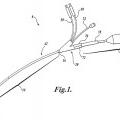
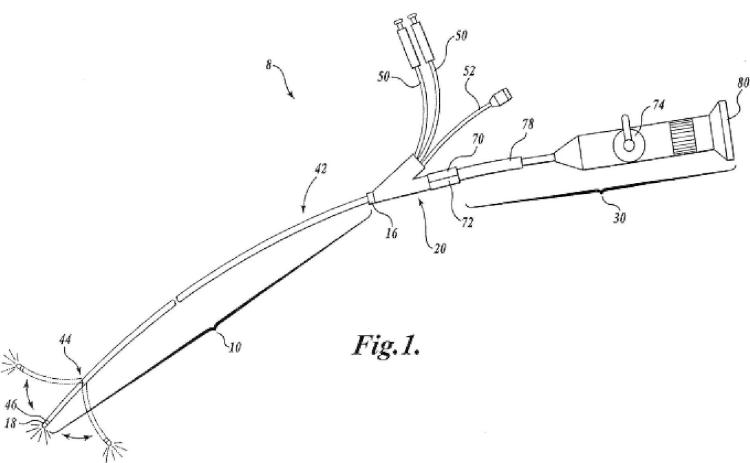
Un mango (3132) de catéter para dirigir un eje (3130) de catéter que tiene una zona proximal y una zona distal y al menos un alambre (3694) de dirección que tiene una zona del extremo distal asegurada en o cerca de la zona del extremo distal del eje (3130) del catéter y un extremo proximal,
comprendiendo el mango (3132) del catéter:
un alojamiento (3220) del mango del catéter que tiene el extremo proximal del eje (3130) del catéter unido a ello; un controlador (3224) de dirección transportado por el alojamiento (3220) del mango del catéter y que tiene el extremo proximal de al menos un alambre (3694) de dirección conectado a ello, siendo el controlador (3224) de dirección movible desde una primera posición hasta una segunda posición, el controlador (3224) de dirección capaz de aplicar tensión al menos a un alambre (3694) de dirección cuando el controlador (3224) de dirección se mueve desde la primera posición a la segunda posición; y
un mecanismo (3340) de bloqueo para retener el controlador (3224) de dirección en la segunda posición para impedir el movimiento del mismo, incluyendo el mecanismo (3340) de bloqueo una palanca (3344) movible entre una posición desbloqueada y una posición bloqueada, estando la palanca (3344) asociada con el controlador (3224) de dirección de manera que el movimiento de la palanca (3344) a la posición bloqueada limita el movimiento del controlador (3224) de dirección;
en donde el controlador (3224) de dirección incluye un primer botón (3280) que puede girar asegurado para rotación a una primera polea (3288);
en donde la palanca (3344) gira alrededor de un eje que es coaxial con el eje rotacional del primer botón (3280); y caracterizado por que
la primera polea (3288) es transportada de forma que puede girar dentro del alojamiento (3220) del mango y por que la rotación de la palanca (3344) afecta al movimiento de la primera polea (3288) desde una posición desacoplada hasta una posición donde la primera polea (3288) contacta con una parte del alojamiento (3220) del mango.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E10185028.
Solicitante: BOSTON SCIENTIFIC LIMITED.
Nacionalidad solicitante: Bermuda.
Dirección: Clarendon House, 2 Church Street Hamilton HM11 BERMUDAS.
Inventor/es: ROBERTSON, DAVID, W., CHU, MICHAEL, S., H., CHIN, YEM, ADAMS,MARK,L, GOLDEN,John,B, MORRIS,BENJAMIN E, FREED,DAVID I, HALL,TODD A, MCWEENEY,JOHN O, CARILLO,OSCAR R. JR, FARRIS,JESSE LEONARD, WELLS,BRIAN KEITH, SLANDA,JOZEF, SHUERMAN,JAMES F.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B1/005 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › A61B 1/00 Instrumentos para proceder al examen médico de las cavidades o conductos del cuerpo por inspección visual o fotográfica, p. ej. endoscopios (examen de las cavidades o conductos del cuerpo utilizando ondas ultrasónicas, sónicas o infrasónicas A61B 8/12; instrumentos endoscópicos para la toma de muestras celulares o para biopsias A61B 10/04; con fines quirúrgicos A61B 17/00; instrumentos quirúrgicos endoscópicos A61B 17/94; instrumentos quirúrgicos que utilizan un haz láser dirigido a lo largo o a través de un conducto flexible A61B 18/22 ); Dispositivos de iluminación al efecto (para los ojos A61B 3/00). › Endoscopios flexibles.
- A61M25/01 A61 […] › A61M DISPOSITIVOS PARA INTRODUCIR AGENTES EN EL CUERPO O PARA DEPOSITARLOS SOBRE EL MISMO (introducción de remedios en o sobre el cuerpo de animales A61D 7/00; medios para la inserción de tampones A61F 13/26; dispositivos para la administración vía oral de alimentos o medicinas A61J; recipientes para la recogida, almacenamiento o administración de sangre o de fluidos médicos A61J 1/05 ); DISPOSITIVOS PARA HACER CIRCULAR LOS AGENTES POR EL CUERPO O PARA SU EXTRACCION (cirugía A61B; aspectos químicos de los artículos quirúrgicos A61L; magnetoterapia utilizando elementos magnéticos colocados dentro del cuerpo A61N 2/10 ); DISPOSITIVOS PARA INDUCIR UN ESTADO DE SUEÑO O LETARGIA O PARA PONERLE FIN. › A61M 25/00 Catéteres; Sondas huecas (para medida o examen A61B). › Introducción, guía, avance, colocación o mantenimiento en posición de catéteres (A61M 25/10 tiene prioridad).
PDF original: ES-2552252_T3.pdf

Patentes similares o relacionadas:
Kit de tratamiento, dispositivo de medición y uso asociados, del 22 de Julio de 2020, de Perouse Medical: Kit de tratamiento que comprende: - una guía que consta de un extremo distal y un extremo proximal , - un dispositivo de determinación […]
Unidad de control unible a un endoscopio que tiene un árbol que puede desviarse a través de dos mandos rotatorios para permitir la operación de los mandos con una man, del 24 de Junio de 2020, de Human XTensions Ltd: Una unidad de control unible a un endoscopio , teniendo el endoscopio dos mandos rotatorios externos y un árbol que puede desviarse a través de los dos […]
Conjunto de catéter intermitente, del 24 de Junio de 2020, de HOLLISTER INCORPORATED: Un conjunto de catéter intermitente , que comprende: un elemento introductor alargado que tiene un extremo de inserción proximal […]
Tapón de catéter extraíble y aplicaciones del mismo, del 3 de Junio de 2020, de Pristine Access Technologies Ltd: Tapón de catéter extraíble , que comprende: un cuerpo de tapón configurado para […]
Conjunto de catéter compacto con tubo de catéter ajustable, del 6 de Mayo de 2020, de HOLLISTER INCORPORATED: Un conjunto de catéter que comprende: un subconjunto de catéter que comprende un mango que define un drenaje de fluido que se extiende […]
Adaptador de jeringa y accesorio de válvula, del 22 de Abril de 2020, de Uropharma Limited: Adaptador para conectar una jeringa a un catéter, comprendiendo dicho adaptador: (a) en un primer extremo, un rebaje cónico para […]
Dispositivo de catéter que tiene un catéter y un dispositivo de accionamiento, del 15 de Abril de 2020, de ECP Entwicklungsgesellschaft mbH: Dispositivo de catéter, que tiene un catéter , un dispositivo de accionamiento en un primer extremo del catéter, un elemento de impulsión […]
Dispositivo de inserción de tubo endotraqueal, del 8 de Abril de 2020, de Gardner, Glenn P: Un dispositivo de inserción de tubo endotraqueal que comprende: un miembro de inserción; un montaje óptico que incluye una carcasa […]