Videocámara para visualizar los puntos ciegos estructurales de un vehículo.
1. Videocámara para visualizar los puntos ciegos estructurales de un vehículo,
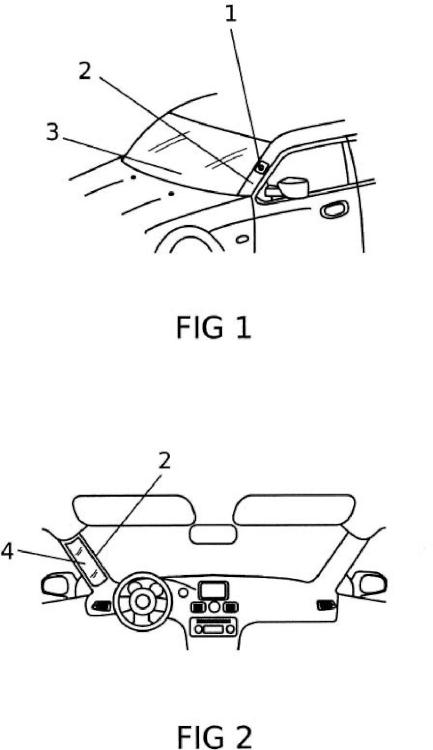
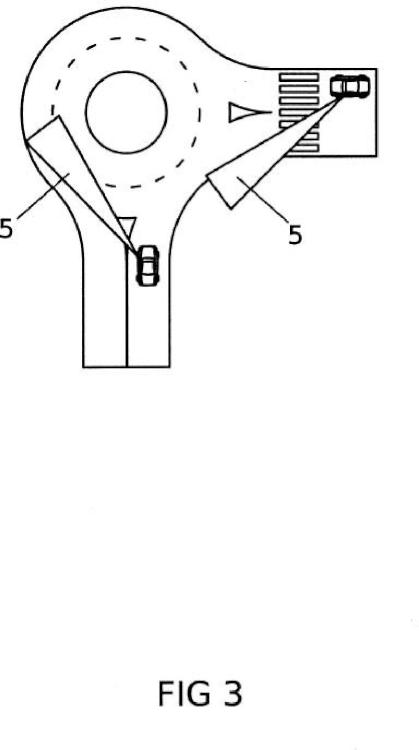
caracterizada por estar constituida a partir de la instalación de al menos una videocámara (1) exterior en el pilar A (2) o pilar de sustentación del parabrisas (3), situado a la izquierda o a la derecha al lado del conductor, según la circulación del país se haga en un sentido o en otro, y un monitor (4) en el interior de dicho pilar A (2) cubriéndolo por completo y adaptándose a su forma, proyectando éste simultáneamente las imágenes de la cámara exterior (1), y haciendo con ello visibles los puntos ciegos estructurales (5) del vehículo.
2. Videocámara para visualizar los puntos ciegos estructurales (5) de un vehículo, según reivindicación 1, caracterizado por instalar una segunda cámara exterior (1) en el pilar A (2) contrario y un segundo monitor (4) interior en el mismo para mejorar también la visibilidad de la zona opuesta al lado que ocupa el conductor y con ello los posibles puntos ciegos estructurales (5) de la zona situada a la derecha del vehículo.
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201500472.
Solicitante: BOZA RIVERA, Ariam.
Nacionalidad solicitante: Cuba.
Dirección: Pasaje Girasol n. 13 41089 Montequinto Sevilla CUBA.
Inventor/es: BOZA RIVERA,Ariam.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B60R1/08 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B60 VEHICULOS EN GENERAL. › B60R VEHICULOS, EQUIPOS O PARTES DE VEHICULOS, NO PREVISTOS EN OTRO LUGAR (prevención, limitación o extinción de incendios especialmente adaptadas a los vehículos A62C 3/07). › B60R 1/00 Disposiciones para la visibilidad óptica (equipo antideslumbrante, p. ej. polarizador, para parabrisas o ventanas B60J 3/00). › que tienen características ópticas especiales, p. ej. para suprimir las zonas sin visibilidad.
Fragmento de la descripción:
VIDEOCAMARA PARA VISUALIZAR lOS PUNTOS CIEGOS
ESTRUCTURALES DE UN VEHíCULO
OBJETO DE lA INVENCiÓN
la presente invención se refiere a la instalación de al menos una videocámara en la parte exterior de uno de los pilares que sostienen el parabrisas de un vehículo, conocidos como pilares A, precisamente el que se encuentra al lado del conductor, quedando enrasada dicha videocámara con la superficie exterior del pilar, y de un monitor en la parte interior del mismo pilar, cubriendo dicho monitor todo el pilar y adaptándose a su curvatura y reflejando la imagen captada por dicha videocámara exterior, de tal manera que el conductor tendrá la visión completa de la zona exterior situada tras el pilar A que se encuentra a su lado, como si este pilar no existiera o fuera transparente. En una realización diferente se instala una segunda cámara en el exterior del pilar opuesto y un segundo monitor en el interior para mejorar aún más la visibilidad del conductor.
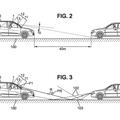
Un punto ciego es una zona en la que se pierde la visibilidad de la vía y puede ser generado por las limitaciones de los espejos retrovisores, existiendo un par de áreas en los laterales del vehículo donde se puede perder de vista un automóvil que circula al lado del conductor, pudiendo generar un accidente al cambiar de carril. Pero los pilares del parabrisas también limitan la visión del conductor provocando puntos ciegos en zonas proyectadas desde la intersección del pilar con la visión del conductor hasta el límite de la calzada o de la glorieta.
Dichos pilares A, que constituyen la estructura metálica que sustenta la luna delantera desde el capó hasta el techo del vehículo, dificultan la visibilidad del conductor sobre todo en cruces y rotondas, cuando se aproximan por su izquierda vehículos o peatones, a causa de los puntos ciegos que provoca la estructura del coche. Este problema se agrava aún más porque cada vez es más frecuente que los vehículos instalen airbags de cortina en dichos pilares A, con lo que agrandan el grueso de los mismos.
Para comprender mejor el punto ciego originado por estos pilares estructurales veamos la figura 3, en ella están marcadas las áreas donde no sería posible ver con los pilares A convencionales, teniendo en cuenta siempre que los vehículos que tienen instalados airbags de cortina se enfrentan a que las zonas no visibles de estos puntos ciegos sean más amplias y por consiguiente más peligrosas. Ajustar los espejos retrovisores para ampliar la visión del conductor puede mejorar la visión trasera, pero no esa visión lateral dificultada por dichos pilares. De ahí que el problema sea de difícil solución.
Existen vehículos con sistemas de detección de punto ciego, automóviles recientes incluyen entre las medidas de seguridad, alertas ya sean visuales y/o sonoras que informan sobre la existencia de un vehículo en las zonas de punto ciego, pero no son iguales a la propuesta en esta invención ni presentan las mismas ventajas.
Entre las ventajas más importantes de la presente invención destacan las siguientes:
Hacer "transparentes" los pilares A que sustentan el parabrisas o luna frontal del vehículo sin atentar contra la integridad y seguridad del
mismo.
Minimizar el problema motivado por el de grosor de tales pilares A
cuando se encuentran instalados en ellos airbags de cortina.
Mejorar la seguridad de la circulación, sobre todo en cruces y rotondas.
El sector de la industria en el que se aplica la presente invención se encuentra en la fabricación de videocámaras y monitores de reproducción simultánea.
ANTECEDENTES DE LA INVENCiÓN
Aunque no se ha encontrado ninguna invención idéntica a la descrita, exponemos a continuación los documentos encontrados que reflejan el estado de la técnica relacionado con la misma.
Así, el documento ES2398004T3 describe una sistema de ayuda al conductor para vigilar la seguridad de conducción, que presenta una unidad electrónica móvil con video-sensor, unidad de computación para tratar datos de imagen y unidad de emisión, que registra el entorno inmediato del vehículo a partir de datos del video-sensor y emite un aviso o una indicación a través de una unidad de emisión, cuando la unidad de computación registra una situación de peligro, en donde la unidad electrónica móvil registra señales acústicas a través de una unidad de entrada acústica y tiene en cuenta estas señales a la hora de evaluar la seguridad de conducción, registrándose las señales acústicas en un modo de aprendizaje a la hora de usar el sistema de ayuda al conductor.
Se trata de una señal acústica de aviso sobre la proximidad de un vehículo, algo muy diferente a la emisión de un video en un monitor interior de a bordo de la invención propuesta.
ES2301835T3 propone un sistema de formación de imágenes, para montar sobre un vehículo, que comprende: una fuente de luz, para proporcionar una energía de luz en forma de impulsos, definiendo dicha energía de luz en forma de impulsos una anchura sustancial del impulso, y una cámara para recibir dicha energía de luz en forma de impulsos, reflejada desde los objetos, pudiendo funcionar dicha cámara con una detección conmutada de dicha energía de luz en forma de impulsos, reflejada desde los objetos situados dentro de la profundidad de campo del que se desea formar imágenes, teniendo dicha profundidad de campo un alcance mínimo, comenzando dicha cámara a detectar energía de luz tras un tiempo de retardo, sustancialmente dado por el tiempo que tarda la anchura sustancial del impulso de dicha energía de luz en forma de impulso, en alcanzar dicho alcance mínimo y en volver completando la reflexión a dicha cámara desde dicho alcance mínimo; estando dicho sistema de tal manera que: dicha detección conmutada de dicha energía de luz en forma de impulso, reflejada desde los objetos, define un intervalo de tiempo de conexión (ON) , durante el cual dicha cámara recibe reflexiones de los objetos, un intervalo de tiempo de desconexión (OFF) , entre dos intervalos de tiempo de conexión contiguos, durante el cual dicha cámara no recibe reflexiones desde los objetos, y un tiempo de sincronización entre dicho intervalo de tiempo de conexión y el tiempo en que dicha energía de luz en forma de impulso se refleja desde los objetos situados dentro de dicha profundidad de campo del que se toman las imágenes; en el que dicho tiempo de sincronización define la cantidad de solapamiento entre dicho intervalo de tiempo de conexión y dicha energía de luz en forma de impulso reflejada desde los objetos, y pudiendo funcionar dicha cámara de manera que crea una sensibilidad en función de un alcance para dicho sistema de formación de imágenes, a través de dicho tiempo de sincronización, de forma tal que dicho solapamiento entre dicha energía de luz en forma de impulso, reflejada desde los objetos, y dicho intervalo de tiempo de conexión, aumenta en función del alcance hasta un alcance óptimo, de dicha profundidad de campo del que se toman imágenes, aumentando así la parte de dicha anchura sustancial del impulso de dicha energía de luz en forma de impulso, reflejada desde los objetos situados entre dicho alcance mínimo y dicho alcance óptimo que alcanza dicha cámara durante el intervalo de tiempo de conexión.
Este sistema es muy complejo y diferente en relación con el propuesto.
KR101416401B1 describe un sistema para la visualización de una imagen posterior de un vehículo, que cambia de una dirección de una imagen posterior recogida por una cámara cuando se selecciona la conducción en marcha atrás, y proyecta la realidad virtual para vidrio de parabrisas, un espejo en el interior, y un espejo exterior, de ese modo proporcionando un conductor con un sentido de la conducción del vehículo hacia adelante durante la conducción en marcha atrás.
Este sistema está pensado para la conducción marcha atrás.
El documento US2014300738A 1 propone una cámara de sistema para un vehículo, que ha de ser dispuesto en el interior del vehículo detrás del parabrisas del vehículo, incluye un alojamiento, una primera cámara módulo que detecta o emite imágenes de una zona delante del vehículo y una segunda cámara módulo que detecta o emite imágenes en al menos un área del parabrisas.
En este caso las cámaras situadas detrás del parabrisas del vehículo detectan imágenes delante del vehículo.
US2014313337A1 describe un sistema de visión de vehículo que incluye un módulo de cámara con un conjunto sensor de imagen, un soporte de lente y una lente. El módulo de cámara está configurado para montar en una estructura de recepción en una superficie interior de un parabrisas de vehículo...
Reivindicaciones:
1. Videocámara para visualizar los puntos ciegos estructurales de un vehículo, caracterizada por estar constituida a partir de la instalación de al menos una videocámara (1) exterior en el pilar A (2) o pilar de sustentación del parabrisas (3), situado a la izquierda o a la derecha al lado del conductor, según la circulación del país se haga en un sentido o en otro, y un monitor (4) en el interior de dicho pilar A (2) cubriéndolo por completo y adaptándose a su forma, proyectando éste simultáneamente las imágenes de la cámara exterior (1), y haciendo con ello visibles los puntos ciegos estructurales (5) del vehículo.
2. Videocámara para visualizar los puntos ciegos estructurales (5) de un vehículo, según reivindicación 1, caracterizado por instalar una segunda cámara exterior (1) en el pilar A (2) contrario y un segundo monitor (4) interior en el mismo para mejorar también la visibilidad de la zona opuesta al lado que ocupa el conductor y con ello los posibles puntos ciegos estructurales (5) de la zona situada a la derecha del vehículo.
Patentes similares o relacionadas:
 Elemento de visión filtrante que forma un parabrisas o un retrovisor para vehículo de carretera, del 29 de Julio de 2020, de OFFICE NATIONAL D'ETUDES ET DE RECHERCHES AEROSPATIALES: Elemento de visión filtrante que forma un parabrisas o un retrovisor para un vehículo de carretera sobre el cual se monta el elemento, y adaptado […]
Elemento de visión filtrante que forma un parabrisas o un retrovisor para vehículo de carretera, del 29 de Julio de 2020, de OFFICE NATIONAL D'ETUDES ET DE RECHERCHES AEROSPATIALES: Elemento de visión filtrante que forma un parabrisas o un retrovisor para un vehículo de carretera sobre el cual se monta el elemento, y adaptado […]
Dispositivo de accionamiento con memoria de forma con elemento accionado biestable, del 15 de Abril de 2020, de SAES GETTERS S.P.A.: Dispositivo de accionamiento con memoria de forma que comprende un cuerpo de soporte , un elemento accionado montado de manera pivotante […]
Retrovisor con movimiento para observar ángulos muertos, del 19 de Noviembre de 2019, de ZURITA RAYA, Ruymán: 1. Retrovisor con movimiento para observar ángulos muertos que, conformado a partir de una carcasa externa que sirve de soporte a, al menos, un espejo […]
Sistema de espejo ajustable, del 5 de Noviembre de 2019, de Thunder Power New Energy Vehicle Development Company Limited: Un sistema de espejo del vehículo ajustable, que comprende: - una carcasa ; - un espejo flexible configurado para cambiar la […]
Sistema de espejo ajustable, del 19 de Junio de 2019, de Thunder Power New Energy Vehicle Development Company Limited: Un sistema de espejo del vehículo ajustable, que comprende: - una carcasa de espejo ; - un espejo flexible configurado para cambiar la curvatura; […]
Dispositivo de visualización y procedimiento para eliminar los campos muertos de visión en los vehículos, del 10 de Enero de 2019, de PLACER MARURI, Emilio: La invención hace referencia a un dispositivo de información , en particular, a un campo de los vehículos de transporte de personas, con al menos un punto […]
Conjunto de espejo retrovisor de vehículo, del 13 de Junio de 2018, de Tseng, Wen-Pin: Un conjunto de espejo retrovisor del vehículo que comprende: una base para fijar una lente principal y una lente auxiliar , […]
MÉTODOS Y SISTEMAS PARA EVITAR EL PROBLEMA DEL ENCANDILAMIENTO NOCTURNO EN RUTA, del 17 de Mayo de 2018, de CORREA SÁNCHEZ, Carlos Alberto: Métodos y sistemas optoelectrónicos para evitar el encandilamiento nocturno del conductor de un vehículo producido por los faros frontales de otros vehículos. La […]