Procedimiento de control de la velocidad de rotación de un motor de un accionamiento de elevación de velocidad controlable y accionamiento de elevación.
Un procedimiento de control de una velocidad de rotación de un motor de un accionamiento de elevación de velocidad controlable,
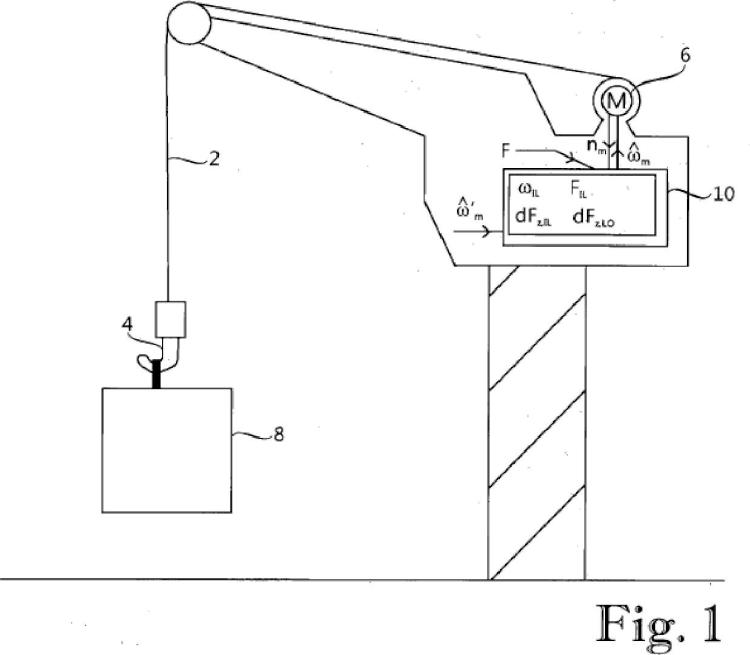
en el que el accionamiento de elevación comprende un cable (2), un miembro (4) de elevación conectado al cable (2), un motor (6) de velocidad controlable que está conectado operativamente al cable (2) para elevar una carga (8) por medio del miembro (4) de elevación y un controlador (10) de elevación, en el que el procedimiento comprende
recibir una instrucción ( m ω^ ' ) de velocidad de elevación;
formar una instrucción ( m ω ) de velocidad final usando la información inicial que contiene la instrucción ( m ω' ) de velocidad de elevación;
usar la instrucción ( m ω^ ) de velocidad final como una instrucción de velocidad para la velocidad de rotación del motor (6) del accionamiento de elevación de velocidad controlable;
en el que el procedimiento está caracterizado por que comprende además supervisar un derivada con respecto a la posición de un valor real de una fuerza de cable (dF/dz), que es una derivada de un valor real de una fuerza de cable con respecto a la posición del miembro (4) de elevación, en el que la posición del miembro (4) de elevación es determinada por el controlador (10) de elevación usando como información inicial una información (nm) relativa a la rotación del motor (6) así como una relación de transmisión conocida entre la rotación del motor (6) y la posición del miembro (4) de elevación, y la información inicial para formar la instrucción ( m ω^ ) de velocidad final que comprende la derivada con respecto a la posición del valor real de la fuerza de cable (dF/dz).
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/FI2009/050505.
Solicitante: KONECRANES PLC.
Nacionalidad solicitante: Finlandia.
Dirección: KONEENKATU 8 05830 HYVINKÄÄ FINLANDIA.
Inventor/es: Salomäki,Janne, KIOVA,JUSSI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B66C13/04 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B66 ELEVACION; LEVANTAMIENTO; REMOLCADO. › B66C GRUAS Y PUENTES-GRUA; ELEMENTOS O DISPOSITIVOS DE TOMA DE CARGA PARA GRUAS, PUENTES GRUA, CABRESTANTES, CABRIAS O POLIPASTOS (mecanismos de enroscadura de cuerda, de cable o de cadena, dispositivos de frenado o de parada de su uso B66D; adaptados especialmente para los reactores nucleares G21). › B66C 13/00 Otras características de estructura o detalles. › Dispositivos auxiliares para mandar los movimientos de las cargas suspendidas o para impedir que el cable coja flecha.
- B66C13/10 B66C 13/00 […] › para impedir que el cable adquiera flecha (dispositivos de mando para mecanismos de rodadura de las cuerdas, cables o cadenas, p. ej. para control de la tensión, B66D 1/40).
- B66C13/23 B66C 13/00 […] › Circuitos para controlar la bajada de la carga.
- B66C23/90 B66C […] › B66C 23/00 Grúas que constan esencialmente de una viga, aguilón o una estructura triangular que actúan como brazo de palanca, montadas de forma que permitan movimientos de traslación o de orientación en planos verticales u horizontales, o bien una combinación de esos movimientos, p. ej. grúas de aguilón, derricks o grúas sobre torres (estructuras de torres que soportan la base B66C 5/00; adaptaciones de armazones que soportan las vías de rodadura B66C 6/00). › Dispositivos para indicar o limitar el movimiento de elevación del ángulo del aguilón o brazo.
- B66D1/46 B66 […] › B66D CABRESTANTES; CABRIAS; APAREJOS, p. ej. POLIPASTOS; TROCOLAS (enrollado y desenrollado de cables con fines de alimentación o almacenado B65H; mecanismos de enrollado o desenrollado de cables para ascensores B66B; dispositivos de elevación especialmente adaptados a los andamios suspendidos E04G 3/32). › B66D 1/00 Mecanismos de enrollamiento de cuerdas, cables o cadenas; Cabrestantes (aparatos de elevación o de tracción portátiles o móviles B66D 3/00). › eléctricos.
- B66D1/48 B66D 1/00 […] › automáticos.
- B66D1/50 B66D 1/00 […] › para mantener una tensión predeterminada de la cuerda, del cable o de la cadena, p. ej. para cuerdas o cables de remolcar cadenas de ancla; Control de la tensión de los cables de cabrias de remolque o de amarre.
- B66D1/52 B66D 1/00 […] › para hacer variar la tensión de una cuerda o de un cable, p. ej. cuando se retira una embarcación del agua.
- H02P5/46 ELECTRICIDAD. › H02 PRODUCCION, CONVERSION O DISTRIBUCION DE LA ENERGIA ELECTRICA. › H02P CONTROL O REGULACION DE MOTORES ELÉCTRICOS, GENERADORES ELECTRICOS O CONVERTIDORES DINAMOELECTRICOS; CONTROL DE TRANSFORMADORES, REACTANCIAS O BOBINAS DE CHOQUE. › H02P 5/00 Disposiciones especialmente adaptadas para la regulación o el control de la velocidad o del par de dos o más motores eléctricos (H02P 6/04, H02P 8/40 tienen prioridad). › para la regulación de velocidad de dos o más motores dinamoeléctricos, en relación a otro.
- H02P7/298 H02P […] › H02P 7/00 Disposiciones para la regulación o el control de la velocidad o el par de motores eléctricos de corriente continua. › controlando la alimentación del inducido y del campo.
PDF original: ES-2545210_T3.pdf
Fragmento de la descripción:
Procedimiento de control de la velocidad de rotación de un motor de un accionamiento de elevación de velocidad controlable y accionamiento de elevación
Antecedentes de la invención
La invención se refiere a un procedimiento y un accionamiento de elevación para controlar una velocidad de rotación de un motor de un accionamiento de elevación de velocidad controlable según el preámbulo de las reivindicaciones 1 y 8, respectivamente. El documento WO02/070392 describe un procedimiento y un accionamiento de elevación según el preámbulo de las reivindicaciones 1 y 8, respectivamente.
Cuando una carga es elevada desde el suelo, tanto la carga como la estructura que transporta la carga son sometidas a vibraciones verticales. La vibración vertical es causada principalmente por una carga de impacto que es generada cuando la carga es elevada rápidamente desde el suelo a una velocidad de elevación alta.
La carga de impacto puede ser reducida manteniendo la velocidad de elevación baja cuando se separa la carga desde el suelo. Un operador de elevación experimentado puede aplicar este procedimiento de manera manual reduciendo la velocidad de elevación en un punto en el tiempo cuando la carga se separa del suelo.
Es conocido el equipamiento de un accionamiento de elevación con un controlador de elevación dispuesto para detectar el tensado de un cable y que la carga está suspendida en el aire mediante la supervisión de un cambio en la fuerza de cable con respecto al tiempo, es decir, la derivada respecto al tiempo de la fuerza de cable. Cuando la derivada respecto al tiempo de la fuerza de cable se hace demasiado alta, la velocidad de elevación se reduce. Cuando la derivada respecto al tiempo de la fuerza de cable se hace suficientemente baja, la velocidad de elevación se eleva de nuevo a su valor original. Dicho controlador permite conseguir resultados bastante buenos en conexión con los accionamientos de elevación de dos velocidades. Un ejemplo de un controlador de velocidad conocido se describe en la publicación US 4 556 830
Un problema con la prevención de la carga de impacto basada en la supervisión de la derivada respecto al tiempo es que el procedimiento no es muy adecuado para los accionamientos de elevación de velocidad controlable en los que la velocidad de elevación puede ser cualquier valor de velocidad entre la velocidad mínima y la velocidad máxima.
Breve descripción de la invención
De esta manera, un objeto de la invención es proporcionar un procedimiento de control de la velocidad de rotación de un motor de un accionamiento de elevación de velocidad controlable, y un accionamiento de elevación para permitir aliviar el problema indicado anteriormente. El objeto de la invención se consigue mediante un procedimiento y un accionamiento de elevación que se caracterizan por lo que se afirma en las reivindicaciones independientes. Las realizaciones preferidas de la invención se describen en las reivindicaciones dependientes.
La idea que inspira la invención es que una derivada con respecto a la posición del valor real de la fuerza de cable se utiliza en la formación de una fuerza de velocidad final se refiere a un cambio en la fuerza de cable con relación a la posición de un miembro de elevación.
Una ventaja de la invención es que mediante la supervisión de la derivada con respecto a la posición del valor real de la fuerza de cable, se obtiene una información más fiable en las etapas de un evento de elevación que mediante el uso de un procedimiento basado en la supervisión de la derivada con respecto al tiempo de la fuerza de cable. La invención es adecuada para su uso, por ejemplo, para indicar que una carga está suspendida en el aire y para indicar el tensado de un cable.
Breve descripción de las figuras
La invención se describe ahora más detalladamente en conexión con las realizaciones preferidas y con referencia a los dibujos adjuntos, en los que:
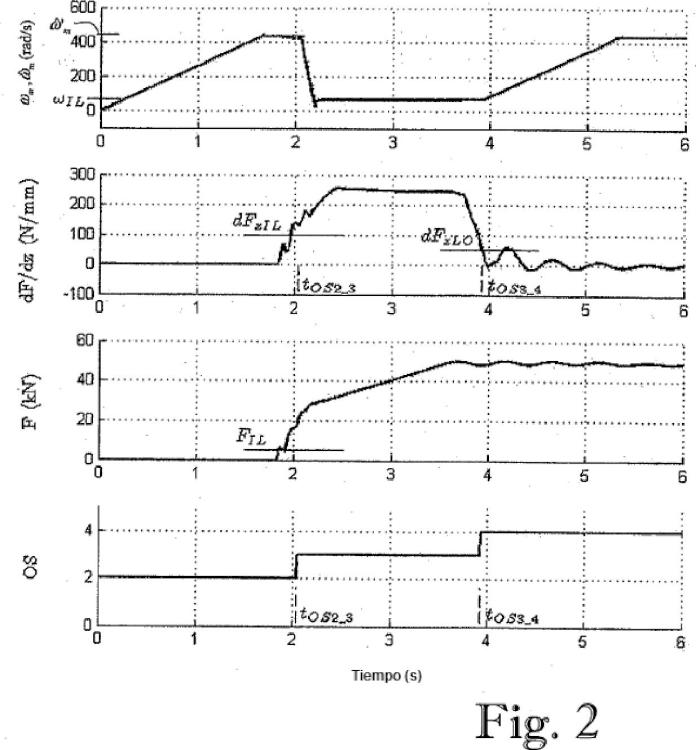
La Fig. 1 muestra una vista esquemática de un accionamiento de elevación según una realización de la invención; y La Fig. 2 muestra un evento de elevación simulado del accionamiento de elevación de la Fig. 1.
Descripción detallada de la invención La Fig. 1 muestra un accionamiento de elevación que comprende un cable 2, un miembro 4 de elevación conectado con el cable, un motor 6 de velocidad controlable, que está conectado operativamente al cable 2 para
elevar una carga 8 por medio del miembro 4 de elevación, y un controlador 10 de elevación. El controlador 10 de elevación está dispuesto para recibir una instrucción ' de velocidad de elevación, para formar una instrucción m
de velocidad final, y para controlar la velocidad de rotación del motor 6 de velocidad controlable por medio de m
la instrucción de velocidad final.
m
El accionamiento de elevación comprende además medios para determinar un valor F real de una fuerza de cable dirigida al cable 2, y medios para determinar la información de posición del miembro 4 de elevación. Los medios para determinar el valor F real de la fuerza de cable pueden comprender una galga extensiométrica conectada a un punto de sujeción del cable 2. La información sobre el valor F real de la fuerza de cable es pasada al controlador 10 de elevación. Los medios para determinar la información de posición del miembro 4 de elevación pueden comprender un sensor de pulsos del motor 6. El sensor de pulsos proporciona información nm relativa a la rotación del motor 6, que es pasada al controlador 10 de elevación. El controlador 10 de elevación determina la posición del miembro 4 de elevación usando como información inicial la información nm relativa a la rotación del motor 6, así como una relación de transmisión conocida entre la rotación del motor 6 y la posición del miembro 4 de elevación.
El controlador 10 de elevación está dispuesto para determinar la derivada con respecto a la posición del valor real de la fuerza de cable dF/dz usando como información inicial el valor F real de la fuerza de cable y la información de posición del miembro 4 de elevación. La derivada con respecto a la posición del valor real de la fuerza de cable dF/dz describe de esta manera un cambio en el valor F real de la fuerza de cable con relación a un cambio en la posición z del miembro 4 de elevación. El controlador 10 de elevación está dispuesto también para supervisar la derivada con respecto a la posición del valor real de la fuerza de cable dF/dz que ha determinado, y para controlar la velocidad de rotación del motor 6 en base a la misma. El accionamiento de elevación utiliza los valores de la derivada con respecto a la posición del valor real de la fuerza de cable dF/dz para la observación de las diferentes etapas del evento de elevación de carga.
El controlador 10 de elevación indica el tensado del cable 2 cuando se cumplen las condiciones predeterminadas. Las condiciones en base a las cuales se indica el tensado del cable comprenden la superación de un valor de límite de carga de impacto de la derivada con respecto a la posición de la fuerza de cable dFz, IL y el valor de límite de carga de impacto de la fuerza FIL de cable predeterminados. El controlador 10 de elevación está dispuesto, en respuesta al tensado indicado del cable, para reducir el valor de la instrucción de velocidad final de manera m
que sea igual a un valor de límite de carga de impacto predeterminado de la instrucción IL de velocidad.
En situaciones en las que no se ha indicado un tensado del cable 2, el controlador 10 de elevación está dispuesto para formar una instrucción de velocidad final que, dentro de los límites de los parámetros predeterminados, m
sigue la instrucción ' de velocidad de elevación. La velocidad de cambio de la instrucción de velocidad mm
final se mantiene dentro de límites predeterminados, es decir, la instrucción de velocidad final no cambia m
escalonadamente incluso si lo hace la instrucción ' de velocidad de elevación.
m
En el controlador 10 de elevación, como una condición para la indicación del tensado del cable 2 se usa por ejemplo la superación del valor de límite de carga de impacto de la fuerza FIL de cable, ya que este procedimiento permite la prevención de una indicación incorrecta del tensado del cable 2 en una situación en la que la derivada con respecto a la posición determinada del valor real de la fuerza de cable dF/dz es errónea. De esta manera, el uso de la superación del valor de límite de carga de impacto de la fuerza FIL de cable como una condición para la indicación del tensado del cable es una condición de respaldo. En una realización de la invención,... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento de control de una velocidad de rotación de un motor de un accionamiento de elevación de velocidad controlable, en el que el accionamiento de elevación comprende un cable (2) , un miembro (4) de elevación conectado al cable (2) , un motor (6) de velocidad controlable que está conectado operativamente al cable (2) para elevar una carga (8) por medio del miembro (4) de elevación y un controlador (10) de elevación, en el que el procedimiento comprende recibir una instrucción (' ) de velocidad de elevación;
m
formar una instrucción ( ) de velocidad final usando la información inicial que contiene la instrucción m
(' ) de velocidad de elevación;
m
usar la instrucción ( ) de velocidad final como una instrucción de velocidad para la velocidad de rotación m
del motor (6) del accionamiento de elevación de velocidad controlable;
en el que el procedimiento está caracterizado por que comprende además supervisar un derivada con respecto a la posición de un valor real de una fuerza de cable (dF/dz) , que es una derivada de un valor real de una fuerza de cable con respecto a la posición del miembro (4) de elevación, en el que la posición del miembro (4) de elevación es determinada por el controlador (10) de elevación usando como información inicial una información (nm) relativa a la rotación del motor (6) así como una relación de transmisión conocida entre la rotación del motor (6) y la posición del miembro (4) de elevación, y la información inicial para formar la instrucción ( ) de velocidad final que comprende la derivada con respecto a la posición del valor real de m
la fuerza de cable (dF/dz) .
2. Procedimiento según la reivindicación 1, caracterizado por que comprende además Indicar la suspensión en el aire de la carga (8) cuando se cumplen las condiciones predeterminadas, en el que las condiciones comprenden que la derivada con respecto a la posición del valor real de la fuerza de cable (dF/dz) caiga por debajo de un valor límite de despegue de carga predeterminado (dFz, LO) ;
aumentar, en respuesta a la suspensión en el aire de la carga indicada, un valor de la instrucción ( ) de m
velocidad final para igualar la instrucción (' ) de velocidad de elevación.
m
3. Procedimiento según la reivindicación 2, caracterizado por que comprende además indicar el tensado del cable en un tiempo (tOS2_3) en el que se cumplen las condiciones predeterminadas; y en el que las condiciones predeterminadas para la indicación de la suspensión en el aire de la carga comprenden que un tiempo (tOS3_4) en el que se indica la suspensión en el aire de la carga sea posterior al tiempo (tOS2_3) en el que se indica el tensado del cable.
4. Procedimiento según la reivindicación 3, caracterizado por que las condiciones predeterminadas para la indicación del tensado del cable comprenden la superación de un valor de límite de carga de impacto predeterminado de la derivada con respecto a la posición de la fuerza de cable (dFz, IL) .
5. Procedimiento según la reivindicación 3 o 4, caracterizado por que las condiciones predeterminadas para la indicación del tensado del cable comprenden superar un valor de límite de carga de impacto predeterminado de la fuerza de cable (FIL) .
6. Procedimiento según una cualquiera de las reivindicaciones 3 a 5, caracterizado por reducir, en respuesta al tensado indicado del cable, el valor de la instrucción ( ) de velocidad final para que sea igual a un valor de
m
límite de carga de impacto predeterminado de la instrucción (IL) de velocidad, que es menor que la instrucción (' ) de velocidad de elevación.
m
7. Procedimiento según la reivindicación 1, caracterizado por que comprende además indicar el tensado del cable cuando se cumplen las condiciones predeterminadas, en el que las condiciones comprenden superar el valor límite de carga de impacto predeterminado de la derivada con respecto a la posición de la fuerza de cable (dFz, IL) ;
reducir, en respuesta al tensado indicado del cable, el valor de la instrucción ( ) de velocidad final para m
igualar el valor de límite de carga de impacto predeterminado de la instrucción (IL) de velocidad, que es menor que la instrucción ( ' ) de velocidad de elevación.
m
8. Un accionamiento de elevación que comprende un cable (2) , un miembro (4) de elevación conectado al cable (2) , un motor (6) de velocidad controlable que está conectado operativamente con el cable (2) para elevar una carga (8) por medio del miembro (4) de elevación y un controlador (10) de elevación, en el que el controlador (10) de elevación está dispuesto para recibir una instrucción (' ) de velocidad de elevación;
m
formar una instrucción ( ) de velocidad final usando la información inicial que contiene la instrucción m
(' ) de velocidad de elevación;
m
controlar una velocidad de rotación del motor (6) de velocidad controlable por medio de la instrucción ( )
m
de velocidad final;
en el que el accionamiento de elevación está caracterizado por que el controlador (10) de elevación está dispuesto además para supervisar una derivada con respecto a la posición de un valor real de una fuerza de cable (dF/dz) , que es una derivada de un valor real de una fuerza de cable con respecto a la posición del miembro (4) de elevación, en el que el controlador (10) de elevación está dispuesto para determinar la posición del miembro (4) de elevación usando como información inicial una información (nm) relativa a la rotación del motor (6) así como una relación de transmisión conocida entre la rotación del motor (6) y la posición del miembro (4) de elevación, y la información inicial para formar la instrucción ( ) de velocidad m
final comprende la derivada con respecto a la posición del valor real de la fuerza de cable (dF/dz) .
9. Accionamiento de elevación según la reivindicación 8, caracterizado por que el controlador (10) de elevación está dispuesto además para indicar la suspensión en el aire de la carga (8) cuando se cumplen las condiciones predeterminadas, en el que las condiciones comprenden que la derivada con respecto a la posición del valor real de la fuerza de cable (dF/dz) caiga por debajo de un valor de límite de despegue de carga predeterminado (dFz, LO) ;
aumentar, en respuesta a la suspensión en el aire de la carga indicada, un valor de la instrucción ( ) de m
velocidad final para igualar la instrucción (' ) de velocidad de elevación.
m
10. Accionamiento de elevación según la reivindicación 8, caracterizado por que el controlador (10) de elevación está dispuesto además para indicar el tensado del cable cuando se cumplen las condiciones predeterminadas, en el que las condiciones comprenden superar un valor de límite de carga de impacto predeterminado de la derivada con respecto a la posición de la fuerza de cable (dFz, IL) ;
reducir, en respuesta al tensado del cable indicado, el valor de la instrucción ( ) de velocidad final para m
igualar el valor de límite de carga de impacto predeterminado de la instrucción (IL) de velocidad.
Patentes similares o relacionadas:
Circuito hidráulico para motor de desplazamiento variable, del 3 de Junio de 2020, de Manitou Italia S.r.l: Un dispositivo para abastecer y modificar una capacidad cúbica de cilindro de un motor hidráulico, que comprende: un primer conducto para abastecer […]
Procedimiento de aseguramiento de un movimiento de levantamiento de una carga y dispositivo de levantamiento asociado, del 29 de Abril de 2020, de MANITOWOC CRANE GROUP FRANCE: Procedimiento de aseguramiento de un movimiento de levantamiento de una carga acoplada mecánicamente a un gancho de un dispositivo de levantamiento […]
Polipasto de cable, del 8 de Abril de 2019, de KONECRANES GLOBAL CORPORATION: Cabrestante que comprende un motor de accionamiento eléctrico , una caja de cambios y un codificador giratorio , en donde el […]
Método de control para un dispositivo de elevación de equilibrio y un dispositivo de equilibrado de elevación, del 19 de Julio de 2017, de Terex MHPS GmbH: Procedimiento de control para un polipasto de equilibrado que comprende un motor de elevación que puede accionarse por medio de un sistema de control […]
Limitador de torsión, del 6 de Julio de 2016, de Liebherr-Components Biberach GmbH: Limitador de torsión para reducir la torsión de un cable , con dos piezas de limitador de torsión (4a, 4b), que pueden girarse la una hacia la otra en la dirección longitudinal […]
Cabrestante, del 20 de Abril de 2016, de Liebherr-Components Biberach GmbH: Cabrestante, en particular cabrestante de un mecanismo de elevación, con un tambor de cable , cuya zona de arrollamiento está delimitada por dos discos […]
Procedimiento y sistema para la compensación de fuerzas o momentos en una instalación de tiro puntual o instalación de tiros de escena, del 21 de Mayo de 2014, de WAAGNER-BIRO AUSTRIA STAGE SYSTEMS AG: Procedimiento para la compensación de fuerzas o momentos en una instalación de tiro puntual o instalación de tiros de escena o instalación de tiro puntual y tiros […]
PROCEDIMIENTO PARA AMORTIGUAR LA MARCHA DE UNA CADENA DE ESLABONES DE UN APAREJO DE CADENA, EN ESPECIAL PARA IMPEDIR LA FORMACION DE UNA OSCILACION DE RESONANCIA DE LA CADENMA DE ESLABONES, Y UN APAREJO DE CADENA PARA EL MISMO., del 1 de Mayo de 2007, de DEMAG CRANES & COMPONENTS GMBH: Procedimiento para amortiguar la marcha de una cadena de eslabones de un aparejo de cadena, en especial para impedir la formación de una oscilación […]