Vehículo robotizado telecomandado.
Vehículo robotizado telecomandado, siendo del tipo de los que disponen de unos medios de rodadura y un brazo articulado rematado en una pinza y que es tele-comandado para llevar a cabo diferentes operaciones de riesgo,
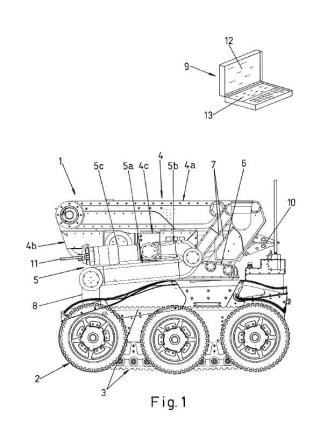
por medio de una maleta de control, de forma que el vehículo comprende: dos juegos de ruedas, uno a cada lateral, accionado cada uno por correspondientes motores; dos juegos de oruga, uno a cada lado por el interior de los juegos de ruedas; un primer brazo articulado montado sobre una torreta giratoria 360º; un segundo brazo articulado y giratorio respecto de un eje vertical de montaje y unos medios de doble articulación de montaje de la torreta para su desplazamiento respecto del eje longitudinal del vehículo, de manera que con los dos juegos de ruedas y los dos juegos de oruga se desplaza por todo tipo de terrenos y con los movimientos combinados de los dos brazos articulados sujeta y manipula los objetos a examen.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201331685.
Solicitante: PROYTECSA SECURITY, S.L.
Nacionalidad solicitante: España.
Inventor/es: SALLEN ROSELLO,CESAR.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B25J5/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25J MANIPULADORES; RECINTOS CON DISPOSITIVOS DE MANIPULACION INTEGRADOS (dispositivos robóticos para recolección individual de frutas, hortalizas, lúpulo y similares A01D 46/30; manipuladores de agujas para cirugía A61B 17/062; manipuladores asociados a las laminadoras B21B 39/20; manipuladores asociados a las máquinas de forja B21J 13/10; medios para mantener las ruedas o sus elementos B60B 30/00; grúas B66C; disposiciones para la manipulación del combustible o de otros materiales utilizados en el interior de reactores nucleares G21C 19/00; combinación estructural de manipuladores con celdas o recintos protegidos contra la radiación G21F 7/06). › Manipuladores montados sobre ruedas o sobre soportes móviles (B25J 1/00 tiene prioridad; manipuladores de control programado B25J 9/00).
- B62D55/02 B […] › B62 VEHICULOS TERRESTRES QUE SE DESPLAZAN DE OTRO MODO QUE POR RAILES. › B62D VEHICULOS DE MOTOR; REMOLQUES (dirección o guiado de máquinas o instrumentos agrícolas según un recorrido determinado A01B 69/00; ruedas, ruedecillas pivotantes, mejora de la adherencia de ruedas B60B; neumáticos para vehículos, inflado de neumáticos, cambio o reparación de neumáticos B60C; conexiones entre vehículos de un mismo tren o de un conjunto similar B60D; vehículos raíl-carretera, vehículos anfibios o transformables B60F; disposiciones de suspensión B60G; calefacción, refrigeración, ventilación u otros dispositivos de tratamiento del aire B60H; ventanas, parabrisas, techos descapotables, puertas o dispositivos similares, cubiertas de protección para vehículos fuera de servicio B60J; disposiciones de conjuntos de propulsión, accionamientos auxiliares, transmisiones, disposición de instrumentos o tableros de a bordo B60K; equipo eléctrico o propulsión de vehículos de tracción eléctrica B60L; alimentación de energía eléctrica para vehículos de tracción eléctrica B60M; disposiciones para pasajeros no previstas en otro lugar B60N; vehículos adaptados al transporte de cargas o para llevar cargas u objetos especiales B60P; adaptación de los dispositivos de señalización o de iluminación, su montaje o soporte, circuitos a este efecto, para vehículos en general B60Q; vehículos, equipos o partes de vehículos, no previstos en otro lugar B60R; servicio,limpieza, reparación, elevación o maniobra, no previstos en otro lugar B60S; frenos, sistemas de control de frenos o partes de estos sistemas B60T; vehículos de colchón de aire B60V; ciclos de motor, sus accesorios B62J, B62K; ensayo de vehículos G01M). › B62D 55/00 Vehículos de orugas (bajo el aspecto de la dirección B62D 11/00). › con orugas y ruedas adicionales.
- G05D1/00 FISICA. › G05 CONTROL; REGULACION. › G05D SISTEMAS DE CONTROL O DE REGULACION DE VARIABLES NO ELECTRICAS (para la colada continua de metales B22D 11/16; dispositivos obturadores en sí F16K; evaluación de variables no eléctricas, ver las subclases apropiadas de G01; para la regulación de variables eléctricas o magnéticas G05F). › Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S).
- G05D1/02 G05D […] › G05D 1/00 Control de la posición, del rumbo, de la altitud o de la actitud de vehículos terrestres, acuáticos, aéreos o espaciales, p. ej. piloto automático (sistemas de radionavegación o sistemas análogos que utilizan otras ondas G01S). › Control de la posición o del rumbo por referencia a un sistema de dos dimensiones.
Fragmento de la descripción:
Vehículo robotizado telecomandado.
OBJETO DE LA INVENCIÓN.
La siguiente invención, según se expresa en el enunciado de la presente memoria descriptiva, se refiere a un vehículo robotizado telecomandado, el cual es del tipo de vehículos robotizados cuyo objeto esencial es la de detección, reconocimiento y desactivación de artefactos explosivos o que entrañen situaciones de peligro para la sociedad.
De esta forma, el vehículo robotizado telecomandado objeto de la invención combina un sistema de desplazamiento basado en dos trenes de ruedas laterales y dos orugas con objeto de facilitar su desplazamiento por terrenos lisos y por cualquier otro tipo de terreno irregular o resbaladizo.
Asimismo, al estar dotado el vehículo robotizado telecomandado objeto de la invención de una pareja de brazos articulados se permite que con uno de los brazos pueda sujetar un objeto y con el otro brazo pueda examinarlo.
CAMPO DE APLICACIÓN.
En la presente memoria se describe un vehículo robotizado telecomandado, el cual presenta un tamaño medio capaz de manipular objetos de hasta unos 200 kilos de peso, y es de especial aplicación para misiones de intervención policial, militar o incluso civil en misiones que entrañan cierto riesgo.
Así, el vehículo robotizado telecomandado es de aplicación cuando se presentan acciones destinadas a ataques a las estructuras de la sociedad tales como la colocación o supuesta colocación de artefactos explosivos, bombas "sucias", ataques con gases químicos, material biológico o dispersión de elementos radioactivos.
Asimismo, el vehículo robotizado telecomandado puede desempeñar misiones de vigilancia autónoma en perímetros, fronteras, industrias o lugares donde una vigilancia autónoma pueda ser de utilidad.
ANTECEDENTES DE LA INVENCIÓN.
Convencionalmente, cuando hay que manipular artefactos explosivos o realizar operaciones de riesgo, más aún, cuando están en riesgo vidas humanas, se utilizan robots que son manejados a distancia por medio de una consola de control.
De esta forma, entre los robots existentes para la manipulación de artefactos explosivos, podemos citar aquel que comprende un brazo articulado, según un único tramo, y sin posibilidad de girar según un plano horizontal, es decir, únicamente, tiene movimiento según un plano vertical y limitado por su único tramo articulado.
Asimismo, este tipo de robots disponen de una serie de elementos de control, como son cámara de visión y sensores de proximidad.
Igualmente, podemos considerar los documentos de patente ES 2 241 490 y ES 1 073 757, de forma que en el documento ES 2 241 490 se describe un "robot autopropulsado para manipulación de cargas explosivas", el cual comprende unos medios de desplazamiento definidos por sendos trenes laterales de rodadura de oruga regulables en anchura e incorporando un brazo articulado, según cuatro tramos, rematado en una pinza, con el primer tramo en forma de horquilla accionado por una pareja de cilindros y en su plegado el cuerpo de pinza es pasante entre la pareja de ramales del primer tramo.
Por otra parte, en el documento ES 1 073 757 se describe un "Robot telecomandado para operaciones especiales", siendo del tipo de robots utilizados para llevar a cabo operaciones de riesgo y que disponen de un tren de rodadura, un brazo telescópico rematado en una pinza y unos medios de control y función a distancia, de forma que el robot incorpora sobre el tren de rodadura una torreta, giratoria 360º, provista de, al menos, una cámara térmica y a cuya torreta es solidario un brazo constituido por una serie de segmentos en número de seis, unidos giratoriamente entre sí y accionados por unos cilindros hidráulicos, disponiendo el brazo de, al menos, una cámara y, al menos, un arma disuasoria.
Partiendo de este tipo de constitución, cada articulación de los brazos es controlada directamente por el operador, lo que implica que para acercar la pinza a un objeto con una posición y ángulo deseados, el operador debe actuar independiente y sucesivamente sobre cada movimiento articulado hasta finalmente lograr la posición deseada, lo que requiere destreza y tiempo en la operación.
Además, el control de fuerzas de las pinzas hidráulicas es prácticamente imposible y, más aún, cuando se trata de objetos delicados, lo cual es un inconveniente.
Por otra parte, también podemos considerar los documentos de patente US 6113343 A; JP 2000326875 y DE 2409027 A1, de forma que en el documento US 6113343 se presenta un robot para desactivación de explosivos, el cual presenta una estructura base para un brazo manipulador constituida por un primer 226 brazo (constituido por un par de miembros de transmisión 230) y un segundo 228 brazo (igualmente constituido por un par de miembros de transmisión, es decir, realmente son parejas de brazos) cada uno con accionamiento independiente respecto del correspondiente eje de giro.
En el documento JP 200032875 se describe un dispositivo de correa de eslabones para mover un vehículo de trabajo, cuyo vehículo puede variar su anchura para lo cual, cada uno de los trenes de rodadura, incorpora una pareja de elementos, de forma que dichas parejas solidarias a ambos trenes de rodadura se encajan en respectivos elementos tubulares solidarios de la propia estructura del vehículo.
Finalmente, en el documento DE 2409027 se describe una pala niveladora, de forma que la pala niveladora es graduable en anchura con objeto de poder viajar por carretera, siendo regulable por medio de respectivos extremos deslizantes.
DESCRIPCIÓN DE LA INVENCIÓN.
En la presente memoria se describe un vehículo robotizado telecomandado, siendo del tipo de vehículos robotizados dotados de unos medios de rodadura y un brazo articulado rematado en una pinza y que es tele-comandado para llevar a cabo diferentes operaciones de riesgo, por medio de una maleta de control con, al menos, una pantalla y los medios de control del vehículo robotizado, de forma que:
** (Ver fórmula) **
el vehículo robotizado comprende:dos juegos de ruedas, uno a cada lateral, de tres ruedas motrices cada uno de ellos, accionado cada juego de ruedas por correspondientes motores;
dos juegos de oruga, uno a cada lado por el interior de los juegos de ruedas, a
un ras ligeramente superior a los juegos de ruedas;
un primer brazo articulado de acción hidráulica montado sobre una torreta giratoria 360º;
un segundo brazo articulado de accionamiento eléctrico y giratorio respecto de un eje vertical de montaje, y;
unos medios de doble articulación de montaje del primer brazo articulado respecto de la torreta, desplazándose le primer brazo articulado según su eje longitudinal.
y cuyo vehículo robotizado está controlado a distancia por:
** (Ver fórmula) **
un equipo de control integrado en una maleta que comprende:una pantalla de visualización de imágenes enviadas por unas cámaras montadas en el vehículo robotizado;
una pantalla táctil en posición horizontal de interfaz con el operador, y;
un dispositivo interfaz HMI definido por un control de juegos "game pad".
de manera que con los dos juegos de ruedas y los dos juegos de oruga se desplaza por todo tipo de terrenos y con los movimientos combinados de los dos brazo articulados sujeta y manipula los objetos a examen de acuerdo a las órdenes dadas por el operador desde el equipo de control transportable.
Por otra parte, cada juego de ruedas laterales motrices está accionado por un motor eléctrico, teniendo tracción en modo diferencial y proporcionando dirección y giros.
El primer brazo articulado, en una ejecución practica, se define por tres tramos y una primera pinza, estando dotado el tercer tramo de un giro lateral de ±90º y la primera pinza está dotada de un giro sinfín.
La capacidad de manipulación de pesos del primer brazo articulado varía en función de las posiciones de articulación del mismo, de forma que cuanto más se extiende menor es su capacidad.
El segundo brazo articulado se define por tres tramos y una segunda pinza, estando dotado el tercer tramo de un giro de 360º respecto del eje longitudinal y de un giro de elevación/descenso respecto de un eje transversal, en tanto que la segunda pinza está dotada de un giro sinfín.
La primera pinza del primer brazo articulado, accionado hidráulicamente, está dotada de un sensor de presión, asociado al suministro de caudal y presión, pudiendo regular y conocer la fuerza exacta ejercita sobe el objeto a manipular Asimismo, la fuerza o presión ejercida por la segunda pinza del segundo brazo articulado se controla por el control de la corriente eléctrica el...
Reivindicaciones:
1ª. VEHÍCULO ROBOTIZADO TELECOMANDADO, siendo del tipo de vehículos robotizados dotados de unos medios de rodadura y un brazo articulado rematado en una pinza y que es tele-comandado para llevar a cabo diferentes operaciones de riesgo, por medio de un equipo de control, caracterizado por que:
** (Ver fórmula) **
el vehículo robotizado (1) comprende:y cuyo vehículo robotizado (1) está controlado a distancia por: ** (Ver fórmula) ** una pantalla de visualización (12) de imágenes enviadas por unas cámaras montadas en el vehículo robotizado; una pantalla táctil (13) en posición horizontal de interfaz con el operador, y; un dispositivo interfaz HMI definido por un control de juegos "gamepad". de manera que con los dos juegos de ruedas (2) y los dos juegos de oruga (3) se desplaza por todo tipo de terrenos y con los movimientos combinados de los dos brazo articulados (4) y (5) sujeta y manipula los objetos a examen de acuerdo a las órdenes dadas por el operador desde el equipo de control, basado en la maleta (9) , transportable. 2ª. VEHÍCULO ROBOTIZADO TELECOMANDADO, según la 1ª reivindicación, caracterizado por que cada juego de ruedas laterales (2) motrices está accionado por un motor eléctrico, teniendo tracción en modo diferencial y proporcionando dirección y giros. 3ª. VEHÍCULO ROBOTIZADO TELECOMANDADO, según la 1ª reivindicación, caracterizado por que los dos juegos de ruedas (2) y los dos juegos de oruga (3) tienen un desplazamiento simultáneo. 4ª. VEHÍCULO ROBOTIZADO TELECOMANDADO, según la 1ª reivindicación, caracterizado por que el primer brazo articulado (4) se define por tres tramos (4a, 4b y 4c) , estando dotado el tercer tramo (4c) de un giro lateral de ±90º y una primera pinza (10) pinza está dotada de un giro sinfín. 5ª. VEHÍCULO ROBOTIZADO TELECOMANDADO, según la 1ª reivindicación, caracterizado por que la capacidad de manipulación de pesos del primer brazo articulado (4) varía en función de las posiciones de articulación. 6ª. VEHÍCULO ROBOTIZADO TELECOMANDADO, según la 1ª reivindicación, caracterizado por que el segundo brazo articulado (5) se define por tres tramos (5a, 5b y 5c) , estando dotado el tercer tramo (5c) de un giro de 360º respecto del eje longitudinal y una segunda pinza (11) está dotada de un giro sinfín. 7ª. VEHÍCULO ROBOTIZADO TELECOMANDADO, según la 1ª reivindicación, caracterizado por que la primera pinza (10) del primer brazo articulado (4) , accionado hidráulicamente, está dotada de un sensor de presión, asociado al suministro de caudal y presión, pudiendo regular y conocer la fuerza exacta ejercita sobe el objeto a manipular 8ª. VEHÍCULO ROBOTIZADO TELECOMANDADO, según la 1ª reivindicación, caracterizado por que la fuerza o presión ejercida por la segunda pinza (11) del segundo brazo articulado (5) se controla por el control de la corriente eléctrica el motor que la activa. 9ª. VEHÍCULO ROBOTIZADO TELECOMANDADO, según la 1ª reivindicación, caracterizado por que los medios de control del vehículo robotizado (1) disponen de un sistema de cálculo espacial y al seleccionar el operario de control del vehículo robotizado (1) la posición de la correspondiente pinza frente al objeto a manipular el brazo articulado efectuará los movimientos precisos y simultáneos de sus diferentes tramos para posicionarse de forma óptima para la manipulación del objeto. 10ª. VEHÍCULO ROBOTIZADO TELECOMANDADO, según la 1ª reivindicación, caracterizado por que la primera pinza (10) del primer brazo articulado (4) está provista de unas articulaciones mecánicas (14) de corto recorrido en sus extremos (15) que asociadas a unos resortes o muelles interiores (16) de la misma serán los que soporten la presión que se ejerce sobre el objeto a manipular, al tratarse de pequeños pesos. 11ª. VEHÍCULO ROBOTIZADO TELECOMANDADO, según la 1ª y 9ª reivindicación, caracterizado por que a los resorte o muelles interiores (16) de la primera pinza (10) del primer brazo articulado (4) se asocian unos sensores electrónicos (17) de distancia. 12ª. VEHÍCULO ROBOTIZADO TELECOMANDADO, según la 1ªy 9ª reivindicación, caracterizado por que a partir de cierta compresión de las articulaciones mecánicas, se produce tope mecánico de alta resistencia, a partir del cual, la primera pinza (10) sigue comprimiendo fuera del rango de detección de fuerza de los sensores electrónicos (17) , y siendo el sensor de presión hidráulica, asociado al circuito hidráulico, el que detecta y proporciona la fuerza ejercida. 13ª. VEHÍCULO ROBOTIZADO TELECOMANDADO, según la 1ª reivindicación, caracterizado por que el vehículo robotizado (1) incorpora unos sensores inerciales, basados en unos acelerómetros asociados al eje motriz del juego de ruedas (2) , teniendo su posicionamiento global y pudiendo desplazarse de forma autónoma según las rutas marcadas por el operador en el equipo de control, basado en la maleta (9) que integra los medios de control. 14ª. VEHÍCULO ROBOTIZADO TELECOMANDADO, según la 1ª reivindicación, caracterizado por que el vehículo robotizado (1) incorpora unos sensores de obstáculos. 15ª. VEHÍCULO ROBOTIZADO TELECOMANDADO, según la 1ª reivindicación, caracterizado por que el equipo de control, basado en la maleta (9) que integra los medios de control, incorpora unos medios para su conexión a internet para su control desde cualquier lugar. 16ª. VEHÍCULO ROBOTIZADO TELECOMANDADO, según la 1ª reivindicación, caracterizado por que el equipo de control, basado en la maleta (9) que integra los medios de control, incorpora unos medios para su conexión a dispositivos móviles. o dos juegos de ruedas (2) , uno a cada lateral, de tres ruedas cada uno de ellos, accionado cada juego de ruedas (2) por correspondientes motores (19) ;
o dos juegos de oruga (3) , uno a cada lado por el interior de los juegos de ruedas (2) , a un ras ligeramente superior a los juegos de ruedas (2) ;
o un primer brazo articulado (4) de acción hidráulica montado, a través de unos medios de doble articulación (7) , sobre una torreta (6) giratoria 360º por el eje central (18) ;
o un segundo brazo articulado (5) de accionamiento eléctrico y giratoria respecto de un eje vertical (8) de montaje, y;
Patentes similares o relacionadas:
 Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática, del 1 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Procedimiento de funcionamiento de un aparato de limpieza dotado de movilidad automática dentro de un entorno, en el que el aparato de limpieza limpia una superficie […]
DISPOSICIÓN DE MANDO, del 30 de Junio de 2020, de SEAT, S.A.: Una disposición de mando de un vehículo autónomo que modifica o ajusta una funcionalidad de conducción de un modo de conducción autónomo del […]
MÉTODO DE DETECCIÓN DE LÍNEAS DE TRANSMISIÓN DE ENERGÍA EN TIEMPO REAL CON VEHÍCULOS AÉREOS NO TRIPULADOS, del 25 de Junio de 2020, de PONTIFICIA UNIVERSIDAD JAVERIANA: La presente invención se refiere a un método para realizar la detección de líneas de transmisión de energía en una imagen capturada mediante una cámara […]
Procedimiento de control de una pluralidad de dispositivos móviles autónomos no tripulados, del 17 de Junio de 2020, de THALES: Un procedimiento de control de una pluralidad de dispositivos móviles autónomos no tripulados, el procedimiento comprende las siguientes etapas: - a) el suministro […]
Sistemas y métodos para simulación de cardán, del 3 de Junio de 2020, de SZ DJI Technology Co., Ltd: Método de simulación de control de cardán, comprendiendo dicho método: recibir una señal de modo de cardán indicativa de una selección […]
UNIDAD CENTRAL DE VEHÍCULO, del 2 de Junio de 2020, de SEAT, S.A.: Una unidad central de un vehículo comprende un procesador y un cámara de adquisición de imágenes , donde las imágenes adquiridas […]
Método para controlar el tiempo de llegada de una aeronave, del 27 de Mayo de 2020, de THE BOEING COMPANY: Un método para controlar la llegada de una aeronave a un punto de referencia objetivo, comprendiendo (a) definir un tiempo requerido de llegada (RTA) en ese punto de referencia […]