VEHÍCULO ACUÁTICO A MOTOR CON UNA INSTALACIÓN DE CONTROL.
Vehículo acuático a motor con una instalación de control (1) y con una unidad de accionamiento (30),
que presenta una hélice acuática accionada por un motor eléctrico (31), en el que el motor eléctrico (31), una unidad de mando (10), un control del motor (20), un control de acumulador (50) y un acumulador (60) están dispuestos en un casco de vehículo y en el que la hélice acuática está dispuesta en un canal de circulación en el casco del vehículo, en el que la unidad de mando (10), el control del motor (20) y el control del acumulador (50) están en comunicación de datos por medio de una instalación de comunicación controlada a través de la instalación de control (1), caracterizado porque la instalación de comunicación controlada presenta un bus del sistema (43) para el intercambio de datos
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2006/000139.
B63C11/46TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B63BUQUES U OTRAS EMBARCACIONES FLOTANTES; SUS EQUIPOS. › B63C BOTADURA, VARADO, O PUESTA EN DIQUE SECO DE BUQUES; SALVAMENTO EN LA MAR; EQUIPOS PARA PERMANECER O TRABAJAR BAJO EL AGUA; MEDIOS DE LOCALIZACION O RECUPERACION DE OBJETOS SUMERGIDOS (redes flotantes, rampas de amerizaje flotantes o dispositivos similares para la recuperación de aviones del agua B63B 35/52). › B63C 11/00 Equipo para permanecer o trabajar bajo el agua; Medios para buscar objetos sumergidos (composiciones químicas para utilizarlas en aparatos de respiración A62D 9/00; accesorios o equipos para la natación A63B 31/00 - A63B 35/00; submarinos B63G 8/00). › Artefactos automotores de buceo o similares, es decir, artefactos conducidos por un hombre vestido de buceador.
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia.
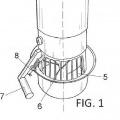
La invención se refiere a un vehículo acuático a motor con una instalación de control y con una unidad de accionamiento, que presenta una hélice acuática accionada por un motor eléctrico, en el que el motor eléctrico, una unidad de mando, un control del motor, un control de acumulador y un acumulador están dispuestos en un casco de vehículo y en el que la hélice acuática está dispuesta en un canal de circulación en el casco del vehículo. La invención se refiere, además, a un procedimiento para el funcionamiento de una instalación de control de un vehículo acuático a motor con una unidad de accionamiento, que presenta una hélice acuática accionada por un motor eléctrico, en la que el motor eléctrico, la unidad de mando, un control de motor, un control de acumulador y un acumulador están dispuestos en un casco del vehículo y en el que la hélice acuática está dispuesta en un canal de circulación en el casco del vehículo. Un vehículo acuático a motor en el sentido de la invención es un vehículo acuático accionado con motor, en el que la persona que controla el vehículo acuático se coloca por encima o por debajo de la superficie del agua. El vehículo acuático sirve como ayuda para el seguimiento de un nadador o submarinista. Un vehículo acuático de este tipo se conoce también con el nombre de submarino, puesto que el nadador o submarinista no se sienta en una cabina o tampoco sobre el vehículo, sino que está en contacto directo con el agua. Se conoce a partir del documento DE 90 05 333 un vehículo acuático a motor, que posee un cuerpo principal cilíndrico, en el que están dispuestas las baterías y otras piezas de control. En la popa están colocados en un cuerpo de forma anular tanto el motor eléctrico como también la hélice acuática. Este vehículo acuático puede servir tanto para el accionamiento de un boque pequeño como también de una persona individual. La circulación generada a través del motor eléctrico y la hélice acuática incide en este caso sobre la persona a transportar. Otro vehículo acuático a motor se conoce a través del documento WO 01/62347. En este caso, el usuario se encuentra sobre el casco del vehículo y la hélice acuática en el canal de circulación es accionada por medio de un motor eléctrico alimentado por baterías, de manera que se aspira una circulación de agua a través del canal de circulación, que se extiende en sentido contrario a la dirección de la marcha del vehículo acuático a motor. La circulación de agua se mantiene de esta manera alejada del usuario y se puede conducir también por delante del usuario debido a la forma del vehículo. Esto facilita la flotación y la inmersión con el vehículo acuático a motor. En este caso, una hélice acuática, un motor eléctrico y un aparato de control son agrupados en una unidad y son alojados en el canal de circulación del vehículo acuático a motor. Esto implica una simplificación esencial de la estructura y para el mantenimiento del vehículo acuático a motor. Las baterías alojadas en una carcasa separada se pueden extraer fácilmente para el proceso de carga y se pueden sustituir por una carcasa nueva con baterías cargadas. El documento EP 1 413 512, que se considera como el estado más próximo de la técnica, describe otro vehículo acuático, con un modo de funcionamiento sencillo. Durante el empleo reglamentario, el vehículo acuático a motor está expuesto a agua dulce o agua salada, a oscilaciones de la temperatura y a impulsión a través de la presión del agua. Si se emplea el aparato en un alquiler, deben tenerse en cuenta medidas de seguridad especiales y usuarios de diferente nivel de instrucción. En particular, deben evitarse en gran medida las funciones erróneas del aparato, que pueden dañar al usuario. El cometido de la invención es crear un vehículo acuático a motor del tipo mencionado al principio, que posibilita un funcionamiento especialmente seguro en virtud de su estructura del sistema. Además, un cometido de la invención es preparar un procedimiento para el funcionamiento especialmente seguro del vehículo acuático a motor. El cometido relacionado con el dispositivo se soluciona porque la unidad de mando, el control del motor y el control del acumulador están en comunicación de datos por medio de una instalación de comunicación controlada a través de la instalación de control. De esta manera, se puede conseguir que la transmisión de datos sea especialmente segura contra interferencias, que se lleve a cabo una supervisión constante de los componentes del sistema y que, en caso necesario, se pueda realizar una desconexión de emergencia. Si en un conector de enchufe de alta corriente desprendible están agrupados contactos de transmisión de datos y controles de transmisión de la potencia, se puede realizar una conexión robusta desprendible entre el control del acumulador y el control del motor. Si la instalación de comunicación controlada presenta un bus de datos para el intercambio de datos, la arquitectura del sistema es especialmente clara, puesto que en todos los componentes están disponibles señales idénticas y en el caso de modificaciones, éstas son efectivas al mismo tiempo en todos los componentes. 2 E06700473 05-01-2012 Si el bus del sistema está realizado como sistema de dos hilos con transmisión de señales diferencial bidireccional, a pesar de las altas corrientes de frecuencia media en el control del motor y en la unidad de accionamiento y a pesar de las influencias de interferencia electromagnética implicadas con ello se puede conseguir un transporte de datos seguro. Se pueden utilizar componentes normalizados económicos, cuando la instalación de comunicación controlada presenta una instalación de transmisión RS-485. Si la unidad de mando está realizada como maestro de bus y el control del motor y el control del acumulador están realizados como subordinados del bus, se puede conseguir que la unidad de procesamiento de datos con memoria pueda supervisar el tráfico de datos y pueda establecer una interrupción. En tal caso de fallo, se puede activar una desconexión de emergencia. Si está prevista una interfaz sin hilos para el intercambio de datos entre la instalación de control y una instalación de servicio, se puede realizar una comunicación de datos protegida contra la penetración de agua. Una forma de realización especialmente ventajosa prevé que la interfaz sin hilos esté realizada como interfaz infrarroja bidireccional u otra interfaz óptica. Muchos ordenadores portátiles están equipados con una interfaz de este tipo y, por lo tanto, se pueden utilizar para el mantenimiento del vehículo acuático a motor. Si para la interfaz sin hilos está previsto un procedimiento múltiple por división de tiempo con un retículo de tiempo variable para emisor y receptor, se aprovecha la anchura de banda disponible de una manera óptima para el tráfico de datos. Se posibilita sin medidas adicionales una carga por primera vez de programas en la instalación de procesamiento de datos en la unidad de mando y/o el control del motor y/o el control del acumulador como también la renovación de los programas cuando para la instalación de comunicación controlada está previsto un software boot-loader para la transferencia de datos a través de la interfaz sin hilos. Si están previstas autorizaciones de acceso para la transferencia de datos a través de la interfaz sin hilos, se puede conseguir que los programas estén protegidos contra acceso no autorizado. Una forma de realización con posibilidades de adaptación de los parámetros de funcionamiento para usuarios instruidos y autorizaciones ampliadas para personal de servicio prevé que para el acceso a parámetros internos, valores de medición, ajustes y programaciones estén previstas unas autorizaciones de acceso. Una forma de realización protegida contra apertura no autorizada y/o contra penetración de agua prevé que el control del motor presente al menos un sensor de luz y al menos un sensor de agua. Si el control del acumulador presenta al menos un sensor de luz y al menos un sensor de agua, el vehículo acuático a motor está protegido especialmente contra función errónea eléctrica. Si están dispuestos elementos de mando ocultos de forma hermética al agua en la instalación de control, se pueden activar funciones especiales como la reposición del reloj del tiempo de alquiler, sin abrir la envoltura hermética al agua del aparato. Si en el control del acumulador está prevista una instalación de alarma acústica, el usuario puede ser avisado de estados de funcionamiento críticos como una temperatura excesiva de componentes o una función errónea. Una forma de realización especialmente adecuada para el alquiler del vehículo acuático a motor prevé que en la instalación de control está prevista una instalación de registro... [Seguir leyendo]
Reivindicaciones:
E06700473 05-01-2012 1.- Vehículo acuático a motor con una instalación de control (1) y con una unidad de accionamiento (30), que presenta una hélice acuática accionada por un motor eléctrico (31), en el que el motor eléctrico (31), una unidad de mando (10), un control del motor (20), un control de acumulador (50) y un acumulador (60) están dispuestos en un casco de vehículo y en el que la hélice acuática está dispuesta en un canal de circulación en el casco del vehículo, en el que la unidad de mando (10), el control del motor (20) y el control del acumulador (50) están en comunicación de datos por medio de una instalación de comunicación controlada a través de la instalación de control (1), caracterizado porque la instalación de comunicación controlada presenta un bus del sistema (43) para el intercambio de datos. 2.- Vehículo acuático de acuerdo con la reivindicación 1, caracterizado porque en un conector de enchufe de alta corriente (40) desprendible están agrupados contactos de transmisión de datos (41) y contactos de transmisión de potencia (42). 3.- Vehículo acuático de acuerdo con la reivindicación 1ó 2, caracterizado porque el bus del sistema (43) está realizado como sistema de dos hilos con transmisión de señales diferencial bidireccional. 4.- Vehículo acuático de acuerdo con una de las reivindicaciones 1 a 3, caracterizado porque la instalación de comunicación controlada presenta una instalación de transmisión RS-485. 5.- Vehículo acuático de acuerdo con una de las reivindicaciones 1 a 4, caracterizado porque la unidad de mando (10) está realizada como maestro de bus y el control del motor (20) y el control del acumulador (50) están realizados como subordinados del bus. 6.- Vehículo acuático de acuerdo con una de las reivindicaciones 1 a 5, caracterizado porque para el intercambio de datos entre la instalación de control (1) y una instalación de servicio está prevista una interfaz sin hilos. 7.- Vehículo acuático de acuerdo con la reivindicación 6, caracterizado porque la interfaz sin hilos está realizada como interfaz infrarroja bidireccional (70) u otra interfaz óptica. 8.- Vehículo acuático de acuerdo con la reivindicación 7 u 8, caracterizado porque para la interfaz sin hilos está previsto un procedimiento múltiple por división de tiempo con un retículo de tiempo variable para emisor y receptor. 9.- Vehículo acuático de acuerdo con una de las reivindicaciones 6 a 8, caracterizado porque para la instalación de conmutación controlada está previsto un software boot-loader para la transferencia de datos a través de la interfaz sin hilos. 10.- Vehículo acuático de acuerdo con una de las reivindicaciones 6 a 9, caracterizado porque para la transferencia de datos a través de la interfaz sin hilos están previstas autorizaciones de acceso. 11.- Vehículo acuático de acuerdo con una de las reivindicaciones anteriores, caracterizado porque para el acceso a parámetros internos, valores de medición, ajustes y programaciones están previstas autorizaciones de acceso. 12.- Vehículo acuático de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el control del motor (20) presenta un sensor de luz (21) y al menos un sensor de agua (23). 13.- Vehículo acuático de acuerdo con una de las reivindicaciones anteriores, caracterizado porque el control del acumulador (50) presenta un sensor de luz (52) y al menos un sensor de agua (53). 14.- Vehículo acuático de acuerdo con una de las reivindicaciones anteriores, caracterizado porque unos elementos de mando ocultos herméticos al agua están dispuestos en la instalación de control (1). 15.- Vehículo acuático de acuerdo con una de las reivindicaciones anteriores, caracterizado porque en el control del acumulador (50) está prevista una instalación de alarma acústica (54). 16.- Vehículo acuático de acuerdo con una de las reivindicaciones anteriores, caracterizado porque en la instalación de control (1) está prevista una instalación de detección de tiempo que actúa sobre la unidad de accionamiento (30). 17.- Vehículo acuático de acuerdo con una de las reivindicaciones anteriores, caracterizado porque en la instalación de control (1) está dispuesto al menos un sensor de la presión del agua (17). 18.- Vehículo acuático de acuerdo con una de las reivindicaciones anteriores, caracterizado porque la unidad de mando (10) presenta un agarradero (15, 16) con sensor de agarradero (18) y porque el sensor de agarradero (18) está constituido por un imán permanente alojado de forma móvil, que está en conexión operativa con dos sensores de campo magnético. 19.- Vehículo acuático de acuerdo con la reivindicación 18, caracterizado porque para la evaluación de las señales 8 de los dos sensores de campo magnético en el sensor del agarradero (18) está prevista una detección de errores a través de la formación de una señal de suma de las dos señales de los sensores de campo magnético. 20.- Procedimiento para el funcionamiento de una instalación de control (1) de un vehículo acuático a motor con una unidad de accionamiento (30), que presenta una hélice acuática accionada por un motor eléctrico (31), en el que el motor eléctrico (31), una unidad de mando (10), un control del motor (20), un control del acumulador (50) y un acumulador (60) están dispuestos en un casco de vehículo y en el que le hélice acuática está dispuesta en un canal de circulación en el casco del vehículo, en el que entre la unidad de mando (10), el control del motor (20) y el control del acumulador (50) se transmiten datos por medio de una instalación de comunicación controlada, caracterizado porque la transmisión de datos y la transmisión de potencia se realizan a través de un conector de enchufe de alta corriente (40). 21.- Procedimiento de acuerdo con la reivindicación 20, caracterizado porque en el caso de una interrupción o interferencia de la instalación de comunicación controlada de más de 3 segundos, el control del acumulador (50) desconecta totalmente la tensión en el conector de enchufe de alta corriente (40). 22.- Procedimiento de acuerdo con una de las reivindicaciones 20 ó 21, caracterizado porque cuando el motor eléctrico (31) está parado, se conmutan como máximo 16 V con una limitación de la corriente de 500 mA desde el control del acumulador (50) al conector de enchufe de alta corriente (40). 23.- Procedimiento de acuerdo con una de las reivindicaciones 20 a 22, caracterizado porque en la instalación de control (1) están registradas informaciones de diagnosis sobre valores extremos de al menos uno de los estados de temperatura, corriente y presión del agua así como al menos uno de los eventos de apertura del aparato, penetración del agua, función errónea de accionamiento y errores del sensor. 24.- Procedimiento de acuerdo con una de las reivindicaciones 20 a 23, caracterizado porque en el caso de activación de una parada de emergencia, se emite desde la unidad de mando (10) a través del bus del sistema (43) una instrucción para la parada del motor eléctrico (31) al control del motor (20), y porque la unidad de mando (10) consulta el número de revoluciones del motor eléctrico (31) a través del bus del sistema (43), y porque en el caso de que se constate un número de revoluciones mayor que cero, se desconecta una fase de potencia (25) del control del motor (20), y porque en el caso de que se constante a continuación un número de revoluciones mayor que cero, se desconecta la alimentación de la tensión del control del motor (20) a través de una señal de desconexión de emergencia (26) independiente del bus del sistema (43). 25.- Procedimiento de acuerdo con una de las reivindicaciones 20 a 24, caracterizado porque para el transporte del vehículo acuático a motor cuando el aparato de carga está conectado se emite a través de la unidad de mando (10) una señal al control del acumulador (50), después de lo cual el control del acumulador (50) supervisa el estado de carga del acumulador (60) y en el caso de un estado de carga de más de 10 % de la capacidad máxima se señaliza un error y en el caso de un estado de carga inferior al 10 % de la capacidad máxima se inicia un proceso de carga hasta el 10 % de la capacidad máxima. 26.- Procedimiento de acuerdo con una de las reivindicaciones 20 a 25, caracterizado porque para el transporte del vehículo acuático a motor se transmite desde la unidad de mando (10) una instrucción para el tránsito a un modo de transporte a través del bus del sistema (43) al control del acumulador (50) y porque el control del acumulador (50) separa la tensión de funcionamiento del conector de enchufe de alta corriente (40) y porque en el control del acumulador (50) se separan todos los componentes salvo un controlador de seguridad (55) de la alimentación de la corriente. 27.- Procedimiento de acuerdo con una de las reivindicaciones 20 a 26, caracterizado porque el controlador de seguridad (55) supervisa en el modo de transporte la tensión y la temperatura del acumulador (60) así como un sensor de luz (52). 28.- Procedimiento de acuerdo con una de las reivindicaciones 20 a 27, caracterizado porque en el modo de transporte el controlador de seguridad (55) supervisa la tensión en el casquillo de carga (51) y en el caso de conexión con un aparato de carga desplaza el control del acumulador (50) al modo de funcionamiento normal. 9 E06700473 05-01-2012 E06700473 05-01-2012
Patentes similares o relacionadas:
Vehículo acuático motorizado eléctrico con refrigeración mediante agua circundante, del 8 de Enero de 2020, de CAYAGO TEC GmbH: Vehículo acuático motorizado con un casco de vehículo sobre el que se apoya o se pone en pie un usuario al menos en parte, con un canal de flujo que discurre […]
Embarcación autopropulsada, del 13 de Noviembre de 2018, de Fundação Noras: Embarcación autopropulsada con un cuerpo principal con forma de U caracterizada por que está provista de dos turbinas , una en cada ala del cuerpo principal con forma de […]
VEHÍCULO SUBMARINO, del 12 de Junio de 2018, de NAVARRETE PORTA, Fernando: Vehículo submarino que comprende una cabina esférica de material transparente, desmontable en dos casquetes (2a, 2b) semiesféricos, a […]
Vehículo acuático con cámara de carga de agua, del 21 de Febrero de 2018, de Cayago GmbH: Vehículo acuático con un casco , que presenta un canal de flujo o que tiene asignado un canal de flujo,
teniendo asignada el canal de flujo […]
Vehículo acuático con acumulador de energía redundante, del 21 de Febrero de 2018, de Cayago GmbH: Vehículo acuático con un casco que se compone de una parte superior y de una parte inferior , estando la parte superior equipada con dos asideros de […]
TRAJE DE BUCEO HIDRODINÁMICO DE SIMULACIÓN DE TIBURÓN CON AUTOPROPULSIÓN MECÁNICA, del 17 de Noviembre de 2016, de CERVIÑO BERASATEGUI, Andrés: Traje de buceo hidrodinámico de simulación de tiburón con autopropulsión mecánica que comprende un traje de neopreno, al cual va fijada una estructura […]
DISPOSITIVO PROPULSOR PARA EXPLORACIÓN SUBMARINA, del 30 de Octubre de 2015, de NAVAS PEREZ, Juan: 1. Dispositivo propulsor para exploración submarina, que siendo del tipo de los constituidos a partir de una carcasa principal, esencialmente […]
Traje de buceo hidrodinámico de simulación de tiburón con autopropulsión mecánica, del 31 de Julio de 2015, de CERVIÑO BERASATEGUI, Andrés: 1. Traje de buceo hidrodinámico de simulación de tiburón con autopropulsión mecánica que comprende un traje de neopreno , al cual va fijada una estructura de fibra de carbono […]
Utilizamos cookies para mejorar nuestros servicios y mostrarle publicidad relevante. Si continua navegando, consideramos que acepta su uso. Puede obtener más información aquí. .
 DISPOSITIVO PROPULSOR PARA EXPLORACIÓN SUBMARINA, del 30 de Octubre de 2015, de NAVAS PEREZ, Juan: 1. Dispositivo propulsor para exploración submarina, que siendo del tipo de los constituidos a partir de una carcasa principal, esencialmente […]
DISPOSITIVO PROPULSOR PARA EXPLORACIÓN SUBMARINA, del 30 de Octubre de 2015, de NAVAS PEREZ, Juan: 1. Dispositivo propulsor para exploración submarina, que siendo del tipo de los constituidos a partir de una carcasa principal, esencialmente […]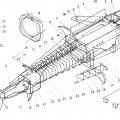 Traje de buceo hidrodinámico de simulación de tiburón con autopropulsión mecánica, del 31 de Julio de 2015, de CERVIÑO BERASATEGUI, Andrés: 1. Traje de buceo hidrodinámico de simulación de tiburón con autopropulsión mecánica que comprende un traje de neopreno , al cual va fijada una estructura de fibra de carbono […]
Traje de buceo hidrodinámico de simulación de tiburón con autopropulsión mecánica, del 31 de Julio de 2015, de CERVIÑO BERASATEGUI, Andrés: 1. Traje de buceo hidrodinámico de simulación de tiburón con autopropulsión mecánica que comprende un traje de neopreno , al cual va fijada una estructura de fibra de carbono […]