UTILIZACIÓN DE DILUCIÓN GEOMÉTRICA DE PRECISIÓN (GDOP) PARA SELECCIONAR EL MEJOR GRUPO DE RECEPTORES EN UN SISTEMA DE MULTILATERACIÓN.
Un procedimiento para determinar una dilución de precisión a la hora de devolver la posición de un objetivo (14) mediante un sistema de multilateración (1) que comprende un conjunto de receptores (3,
4, 5, 6) para recibir señales desde dicho objetivo (14), procedimiento que comprende las etapas de: seleccionar (30) un receptor primario a partir del conjunto de receptores (3, 4, 5, 6); formar un primer grupo que incluye el primario, y otros, del conjunto de receptores (3, 4, 5, 6); calcular una estimación de posición del objetivo utilizando el primer grupo; calcular (32) una dilución geométrica de precisión para el primer grupo; calcular una contribución (33) a la dilución geométrica de precisión para cada receptor del primer grupo; determinar el peor receptor del primer grupo que presenta la mayor contribución a la dilución geométrica de precisión; modificar el primer grupo eliminando el peor receptor del primer grupo para formar un grupo modificado (34); calcular una dilución geométrica de precisión para el grupo modificado (35); comparar la dilución geométrica de precisión del primer grupo y del grupo modificado (36); y si la dilución geométrica de precisión del grupo modificado es menor que la del primer grupo, entonces; calcular una estimación de posición posterior del objetivo utilizando el grupo modificado (34); y si la dilución geométrica de precisión del grupo modificado es la misma o mayor que la del primer grupo, entonces utilizar el primer grupo para calcular una estimación de posición posterior del objetivo (37)
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07113612.
Solicitante: ROKE MANOR RESEARCH LIMITED.
Nacionalidad solicitante: Reino Unido.
Dirección: ROKE MANOR, OLD SALISBURY LANE ROMSEY, HAMPSHIRE SO51 0ZN REINO UNIDO.
Inventor/es: THOMAS, DAVID WYNNE.
Fecha de Publicación: .
Fecha Solicitud PCT: 1 de Agosto de 2007.
Clasificación Internacional de Patentes:
- G01S13/74 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 13/00 Sistemas que utilizan la reflexión o la rerradiación de ondas de radio, p. ej. sistemas de radar; Sistemas análogos que utilizan la reflexión o la rerradiación de ondas cuya naturaleza o longitud de onda sea irrelevante o no especificada. › Sistemas que utilizan la rerradiación de ondas radio, p. ej. sistemas de radar secundario; Sistemas análogos.
- G01S5/02A1
Clasificación PCT:
- G01S13/74 G01S 13/00 […] › Sistemas que utilizan la rerradiación de ondas radio, p. ej. sistemas de radar secundario; Sistemas análogos.
- G01S5/02 G01S […] › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › usando ondas de radio (G01S 19/00 tiene prioridad).
Países PCT: Austria, Bélgica, Suiza, Alemania, Dinamarca, España, Francia, Reino Unido, Grecia, Italia, Liechtensein, Luxemburgo, Países Bajos, Suecia, Mónaco, Portugal, Irlanda, Eslovenia, Finlandia, Rumania, Chipre, Lituania, Letonia, Ex República Yugoslava de Macedonia, Albania.
PDF original: ES-2361776_T3.pdf
Fragmento de la descripción:
Esta invención se refiere a un procedimiento y a un aparato que se utilizan en un sistema de multilateración para determinar una posición de un objeto y también se refiere al propio sistema de multilateración.
Los sistemas de multilateración se utilizan para proporcionar, en particular, la posición de una aeronave en vuelo o en las pistas de un aeropuerto. Una señal transmitida por un transmisor de la aeronave se recibe por una pluralidad de estaciones receptoras en ubicaciones conocidas. La señal se transmite por un transpondedor de radar de vigilancia secundario (SSR) a 1090 MHz y es una de una pluralidad de tipos o formatos de código conocidos, tales como el modo A/C y el modo S. Comparando el tiempo de llegada de la señal en cada una de las estaciones receptoras y conociendo sus ubicaciones es posible calcular la posición de la aeronave en el tiempo de transmisión. Tal sistema y tal técnica de multilateración de este tipo se describen en la patente GB2250154.
Debe apreciarse que con el fin de determinar de manera precisa la posición de una aeronave, es necesario tener en cuenta las variaciones en una longitud de trayectoria aparente entre partes del sistema. Esto es para que pueda obtenerse una diferencia de tiempo significativa en los valores de llegada de la señal. Esto puede dar lugar a un factor denominado como retardo de tiempo de grupo. El envejecimiento de los componentes, por ejemplo, puede provocar una variación en el retardo de tiempo de grupo que puede requerir el mantenimiento de partes del sistema u otra acción reparadora o corrección.
Además, el retardo de tiempo de grupo tendrá un efecto en la precisión de la posición calculada del objetivo. Esto se denomina como dilución geométrica de precisión (GDOP). La GDOP variará dependiendo de la posición del objetivo.
Los documentos US5166694, US6408246 y el documento “A vehicle location system (ULS) solution approach” de Chadwick JB et al, IEEE, 20 de marzo de 2990, páginas 127 a 132, XP 010001106 da a conocer sistemas de multilateración en los que se considera la GDOP para un grupo de receptores.
La presente invención tiene como objetivo determinar qué grupo de los posibles grupos de receptores del sistema de multilateración proporciona el resultado de dilución geométrica de precisión más pequeño.
Para una transmisión dada desde el objetivo, la unidad central de procesamiento recibirá mediciones de tiempo desde un subconjunto del número total de receptores. Una manera de determinar el mejor subconjunto de las mediciones disponibles a utilizar es proporcionando un mapa para cada posible subconjunto de receptores para el que pueden recibirse las mediciones, teniendo en cuenta que el subconjunto de mediciones recibidas debe utilizarse para proporcionar la GDOP mínima para cada posición en el área de interés. Sin embargo, un esquema de este tipo requiere un elevado número de agrupaciones posibles, donde el número total de receptores es elevado. Estas agrupaciones se denominan como “mapas”.
De acuerdo con la invención, se proporciona un procedimiento de acuerdo con la reivindicación 1. Un segundo aspecto de la invención proporciona un aparato de acuerdo con la reivindicación 5.
A continuación se describirá, solamente a modo de ejemplo, una realización específica de la invención con referencia a los dibujos, en los que:
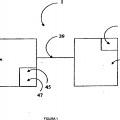
la figura 1 muestra un sistema y un aparato de multilateración de acuerdo con la invención;
la figura 2 es un diagrama de vector y distancias con respecto a un objetivo T desde cuatro receptores del sistema de la figura 1;
la figura 3 es una figura explicativa que muestra el procedimiento de acuerdo con la invención.
Tal y como se muestra en la figura 1, un sistema de multilateración 1 incluye cinco receptores 2 a 6 conectados mediante enlaces de comunicaciones 7 a 11 (fibra óptica) que forman una red de área extensa con respecto a un subsistema central de procesamiento 12. Cada receptor es nominalmente idéntico y comprende, tal y como se muestra en el receptor 2, una sección receptora 13 que detecta y convierte una señal de RF recibida transmitida desde una aeronave 14 en una forma que es adecuada para digitalizarse en un digitalizador 15. El digitalizador 15 lleva a cabo una conversión de analógico a digital y un extractor de código 15a, que busca un código SSR particular, detecta el código en una ventana de tiempo y transmite una señal digital a través de la trayectoria de comunicaciones al subsistema central de procesamiento 12 indicando el tiempo de llegada del código en la ventana. En cada receptor hay un retardo asociado con las secciones 13, 15 y 15a denominado como el retardo de grupo. Esto provoca un error en el tiempo de llegada determinado de una señal tal y como se describe en la solicitud británica en tramitación junto con la presente No. 0513483.8. A estos valores de tiempos de llegada se les aplica una técnica de
40
45
multilateración de un tipo conocido para determinar la posición de la aeronave 14 y esto se lleva a cabo por el subsistema central de procesamiento 12.
El subsistema central de procesamiento 12 se describe en este documento como una unidad separada pero puede estar situada en la misma posición que uno de los receptores. Incluye una pluralidad de puertos conectados a los enlaces de comunicaciones 7 a 11. Los puertos están acoplados a través de filtros 16 a 20 a un correlador 21. Estos filtros eliminan el ruido de las señales que puede dar lugar a errores de posición. El correlador 21 correlaciona los datos de tiempo de llegada con un conjunto de disposiciones que contienen grupos de respuestas que pueden originarse a partir de la misma transmisión.
Las disposiciones correlacionadas están acopladas a un procesador 22 que lleva a cabo una multilateración para obtener la posición de la aeronave 14 de una manera conocida y para proporcionar los datos de posición a una aplicación de seguimiento 23 que muestra la posición a un controlador de tráfico aéreo.
El procesador 22 también proporciona datos de salida a un sistema de alerta 24 que genera una alarma cuando se detecta que uno de los receptores presenta un retardo de grupo anormal. Como alternativa, el efecto del retardo de grupo puede eliminarse con la técnica de multilateración llevada a cabo por el procesador 22. La detección del retardo de grupo se lleva a cabo mediante una aplicación que se ejecuta en el procesador 22 tal y como se describe en la solicitud británica en tramitación junto con la presente No. 0513483.8.
El procesador 22 también está programado para determinar qué agrupación de receptores utilizar cuando la aeronave sobrevuela diferentes regiones geográficas. En este sistema, las agrupaciones varían para garantizar que el grupo utilizado sea el que proporcione el mejor resultado para una ubicación particular de un objetivo o aeronave.
A medida que cambia la posición de la aeronave, la longitud de trayectoria varía con respecto a las diversas posiciones. Esto da lugar a una dilución geométrica de precisión que cambia con la ubicación del objetivo dependiendo del grupo de receptores utilizado. Se ha sugerido que puede utilizarse una serie de "mapas" para determinar la mejor agrupación a utilizar en una ubicación particular. Sin embargo, esto es poco práctico cuando aumenta el número de receptores, en particular cuando la aeronave se mueve en tres dimensiones.
El número de “mapas” requeridos es
**(Ver fórmula)**
donde n es el número total de receptores. La suma se refiere al número de mapas requeridos para grupos de tamaño r=5 a n. Puesto que se utiliza un mínimo de cuatro receptores para calcular una posición, solo es necesario tomar una decisión para grupos de mediciones recibidas mayores que 4.
Para diez receptores se requieren seiscientos treinta y ocho “mapas” de subconjuntos distintos. Por consiguiente, un enfoque de esta naturaleza requiere que el aparato tenga una gran capacidad de memoria para albergar el elevado número de "mapas" necesarios.
La invención proporciona un procedimiento y un aparato que seleccionan un subconjunto de receptores apropiado que puede utilizarse en tiempo real para un sistema que utiliza un elevado número de receptores.
Para cualquier subconjunto dado, en esta realización específica se selecciona un receptor que se considerará... [Seguir leyendo]
Reivindicaciones:
1. Un procedimiento para determinar una dilución de precisión a la hora de devolver la posición de un objetivo (14) mediante un sistema de multilateración (1) que comprende un conjunto de receptores (3, 4, 5, 6) para recibir señales desde dicho objetivo (14), procedimiento que comprende las etapas de:
seleccionar (30) un receptor primario a partir del conjunto de receptores (3, 4, 5, 6); formar un primer grupo que incluye el primario, y otros, del conjunto de receptores (3, 4, 5, 6); calcular una estimación de posición del objetivo utilizando el primer grupo; calcular (32) una dilución geométrica de precisión para el primer grupo; calcular una contribución (33) a la dilución geométrica de precisión para cada receptor del primer grupo; determinar el peor receptor del primer grupo que presenta la mayor contribución a la dilución geométrica de preci
sión; modificar el primer grupo eliminando el peor receptor del primer grupo para formar un grupo modificado (34); calcular una dilución geométrica de precisión para el grupo modificado (35); comparar la dilución geométrica de precisión del primer grupo y del grupo modificado (36); y si la dilución geométrica de precisión del grupo modificado es menor que la del primer grupo, entonces; calcular una
estimación de posición posterior del objetivo utilizando el grupo modificado (34); y
si la dilución geométrica de precisión del grupo modificado es la misma o mayor que la del primer grupo, entonces
utilizar el primer grupo para calcular una estimación de posición posterior del objetivo (37).
2. Un procedimiento según la reivindicación 1, en el que el receptor más próximo a la posición media geográfica de entre el grupo de receptores se designa como un receptor primario y los otros receptores del grupo se designan como los receptores secundarios, y en el que la etapa de modificar el grupo requiere la eliminación de al menos uno de los receptores secundarios.
3. Un procedimiento según la reivindicación 1 o la reivindicación 2, en el que la dilución geométrica de precisión se obtiene a partir de
**(Ver fórmula)**
donde r = [rx ry rz]T = posición del objetivo con respecto al receptor primario y t1 = tiempo de recepción de una señal en el receptor I con respecto al tiempo de recepción de una señal en el receptor primario.
4. Aparato (22) para determinar un grupo de receptores (3, 4, 5, 6) a utilizar en un proceso de multilateración para obtener la posición de un objetivo, aparato de determinación de grupo que comprende:
medios para aceptar salidas de los receptores (16 a 20); medios para asignar al menos algunos de los receptores a un primer grupo (22); medios para determinar a partir de las salidas del receptor del primer grupo una estimación de posición del objetivo
(22); medios para determinar una dilución geométrica de precisión para el primer grupo (22); medios para calcular una contribución a la dilución geométrica de precisión para cada receptor del grupo de recepto
res del primer grupo (22);
medios para determinar el peor receptor del primer grupo que presenta la mayor contribución a la dilución geométri
ca de precisión para el grupo (22);
en el que los medios de asignación son sensibles a la determinación del peor receptor para modificar el grupo
eliminando el peor receptor del grupo para crear un grupo modificado (22); medios para comparar la dilución geométrica de precisión del primer grupo y del grupo modificado (22); y en el que los medios de determinación de una estimación de posición del objetivo son sensibles a los medios de
comparación para utilizar el primer grupo cuando la dilución geométrica de precisión del primer grupo es menor que la del grupo modificado y para utilizar el grupo modificado cuando la dilución geométrica del grupo modificado es menor que la del primer grupo.
5. Aparato según la reivindicación 4, que comprende medios para designar un primer receptor del grupo más próximo a la posición media geográfica del grupo como un receptor primario y para designar los receptores restantes del grupo como receptores secundarios, y en el que los medios que determinan el peor receptor son sensibles a los medios de designación para seleccionar el peor receptor de los receptores secundarios del grupo.
6. Un sistema de multilateración que comprende un aparato de acuerdo con las reivindicaciones 4 y 5.
Patentes similares o relacionadas:
Un sistema de etiquetas electrónicas de precios, del 1 de Julio de 2020, de MariSense Oy: Un procedimiento para un sistema de etiquetas electrónicas de precios que comprende al menos una estación base y una pluralidad de etiquetas electrónicas […]
Método y sistema de rastreo de objetos, del 10 de Junio de 2020, de Fedex Corporate Services, Inc: Un método para rastrear al menos un objeto configurado para ser transportado por al menos un vehículo , el método ejecutado por […]
Protocolo FTM con ángulo de llegada y ángulo de salida, del 14 de Agosto de 2019, de QUALCOMM INCORPORATED: Un procedimiento para realizar una operación de alcance entre un primer dispositivo (D1) y un segundo dispositivo (D2), siendo realizado […]
Protocolo FTM con ángulo de llegada y ángulo de salida, del 3 de Abril de 2019, de QUALCOMM INCORPORATED: Un procedimiento para realizar un operación de alcance entre un primer dispositivo y un segundo dispositivo, el procedimiento realizado por […]
 Medición de distancia mejorada utilizando el tiempo de vuelo de las señales, del 30 de Octubre de 2018, de KONINKLIJKE PHILIPS N.V: Un sistema que comprende un primer dispositivo y un segundo dispositivo , estando configurado el primer dispositivo y el segundo dispositivo […]
Medición de distancia mejorada utilizando el tiempo de vuelo de las señales, del 30 de Octubre de 2018, de KONINKLIJKE PHILIPS N.V: Un sistema que comprende un primer dispositivo y un segundo dispositivo , estando configurado el primer dispositivo y el segundo dispositivo […]
Método para optimizar la precisión de localización de una etiqueta RFID en un alcance de radio de frecuencia ultra alta en un sistema para la localización de etiquetas RFID que comprende una pluralidad de lectores, del 26 de Julio de 2017, de SKIDATA AG: Método para optimizar la precisión de localización de una etiqueta RFID en un alcance de radio de frecuencia ultra alta en un sistema para […]
Métodos y sistemas para la determinación de la posición de vehículos en un sistema automático de identificación de vehículos, del 27 de Abril de 2016, de KAPSCH TRAFFICCOM AG: Un metodo de estimacion de ubicacion de vehiculos en una carretera con una direccion de marcha que utiliza un sistema automatico de identificacion […]
 Dispositivo de identificación y sistema de identificación, del 30 de Septiembre de 2015, de Sato Vicinity Pty Ltd: Un dispositivo de identificación para recibir una primera señal y transmitir una segunda señal, incluyendo el dispositivo:
un medio de recepción […]
Dispositivo de identificación y sistema de identificación, del 30 de Septiembre de 2015, de Sato Vicinity Pty Ltd: Un dispositivo de identificación para recibir una primera señal y transmitir una segunda señal, incluyendo el dispositivo:
un medio de recepción […]