Unidad portabrocas.
Unidad portabrocas que comprende una carcasa (12), un portabrocas (14) giratorio y desplazablelongitudinalmente con respecto a la carcasa (12) y conectado a un motor accionador (10),
en la que el portabrocas(14) está provisto de chaveteros (20) que se extienden axialmente para cooperar con proyecciones internas de unmanguito accionador de rotación (21) que rodea el portabrocas (14) y una rosca de tornillo (26) para cooperar conuna rosca interna (27) de un manguito accionador de avance (22) que rodea el portabrocas (14) y cojinetes (30-32-34) para el soporte radial y axial del portabrocas (14) con respecto a la carcasa (12), caracterizado por que dichoscojinetes (30-32-34) comprenden
* uno o más cojinetes radiales (30-32) para transferir fuerzas radiales solo entre la carcasa (12) y el manguitoaccionador de avance (22),
* un solo cojinete de empuje (34) para transferir fuerzas axiales solo entre la carcasa (12) y el manguitoaccionador de avance (22), en el que
* un dispositivo de detección de fuerza axial (36) está asociado con dicho cojinete de empuje (34) y estádispuesto para suministrar señales eléctricas sensibles a la fuerza axial.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/SE2009/000483.
Solicitante: Atlas Copco Industrial Technique AB.
Nacionalidad solicitante: Suecia.
Dirección: 105 23 Stockholm SUECIA.
Inventor/es: ERIKSSON,ULF MICHAEL, JACOBSSON,WILHELM MATTIAS.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23B47/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23B TORNEADO; TALADRADO (usando un electrodo en lugar de una herramienta B23H, p.ej. haciendo agujeros B23H 9/14; trabajando con un haz de laser B23K 26/00; dispositivos para copiar o controlar B23Q). › Características de estructura de los elementos constitutivos especialmente concebidos para las máquinas de escariar o de taladrar; Accesorios de estas máquinas (husillos de trabajo, palieres correspondientes B23B 19/02; para máquinas herramientas en general B23Q).
- B23Q17/09 B23 […] › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 17/00 Dispositivos para indicar o medir sobre las máquinas herramientas (para el control automático o la regulación del movimiento de avance, de la velocidad de corte o de la posición de la herramienta o de la pieza B23Q 15/00). › para indicar o medir la presión de corte o el estado de la herramienta de trabajo, p. ej. capacidad de corte, carga sobre la herramienta (dispositivos para prevenir la sobrecarga de la herramienta B23Q 11/04; dispositivos para indicar los defectos de los agujeros durante la perforación B23B 49/00).
- B23Q5/32 B23Q […] › B23Q 5/00 Mecanismos de propulsión o de avance; Disposición de los mecanismos de control a este efecto (control automático B23Q 15/00; copiado B23Q 33/00, B23Q 35/00; especialmente adaptados a las máquinas de escariar o de taladrar B23B 39/10, B23B 47/02). › Avance de los husillos de trabajo (avance de los soportes de husillos B23Q 5/34).
- B23Q5/54 B23Q 5/00 […] › Dispositivos o partes constitutivas no limitados al grupo B23Q 5/02 o al grupo B23Q 5/22 respectivamente.
PDF original: ES-2400546_T3.pdf
Descripción:
Unidad portabrocas La invención se refiere a una unidad portabrocas del tipo que tiene un portabrocas con chaveteros que se extienden axialmente para cooperar con un mecanismo accionador de rotación y una rosca de tornillo para cooperar con un mecanismo accionador de avance y cojinetes para el soporte radial y axial del portabrocas.
Un aparato de perforación que comprende una unidad portabrocas del tipo mencionado anteriormente se ha descrito previamente, por ejemplo, en la Patente de Estados Unidos Nº 4.591.299. Este aparato incluye un solo motor neumático acoplado por transmisión tanto al mecanismo accionador de rotación como al mecanismo accionador de avance.
En algunas unidades portabrocas de la técnica anterior del tipo mencionado anteriormente, el mecanismo accionador de rotación y el mecanismo accionador de avance se accionan por un motor eléctrico común, y la fuerza de avance que se aplica en el portabrocas se ha controlado mediante la corriente del motor, de forma que cuando la corriente del motor supera un cierto nivel, la fuerza de avance es demasiado alta y, por el contrario, cuando la potencia del motor es inferior a un cierto nivel, la fuerza de avance es demasiado baja. Por lo tanto, se ha asumido que existe una conexión lo suficientemente segura entre la potencia de salida o el par de torsión del motor de rotación y la fuerza de avance axial que se aplica en el portabrocas y, por consiguiente, la potencia de salida del motor se ha supervisado y controlado para que no supere ciertos límites establecidos para cada tamaño de la broca. Esta técnica conocida significa que la fuerza de avance real que se aplica en el portabrocas no se ha medido directamente. Un inconveniente importante de esta técnica conocida es que existe un conjunto de otros factores involucrados que puede cambiar la relación entre la potencia de salida del motor y la fuerza de avance que se aplica realmente en el portabrocas. Por ejemplo, los cojinetes y/o engranajes dañados en la transmisión de potencia entre el motor accionador y el portabrocas tendrían como resultado una elevada potencia de salida del motor engañosa y, por consiguiente, una fuerza de avance indicada como “elevada” dando como resultado una reducción de la potencia del motor errónea e inapropiada.
Otra forma de indicar la fuerza de avance que se aplica realmente en el portabrocas es disponer un par de dispositivos de detección de fuerza axial asociados con los cojinetes del rotor de tipo bola del mecanismo de avance del portabrocas. Esto significa que la fuerza axial del portabrocas se extiende a dos o más cojinetes y que se disponen dos o más dispositivos de detección de fuerza axial para suministrar señales separadas a una unidad de cálculo en la que las señales recibidas se juntan para proporcionar una indicación verdadera de la fuerza de avance real. Al emplear dos o más cojinetes transmisores de fuerza axial y dos o más dispositivos de detección de fuerza axial se necesita una capacidad de cálculo extraordinaria para el tratamiento de las señales y esto ocasiona una unidad portabrocas innecesariamente voluminosa.
Es un objeto de la invención proporcionar una unidad portabrocas del tipo que tiene un portabrocas con chaveteros que se extienden axialmente para cooperar con un mecanismo accionador de rotación y una rosca de tornillo para cooperar con un mecanismo accionador de avance, en la que se proporciona un dispositivo de detección de la fuerza de avance que permite dimensiones de salida más estrechas de la unidad del rotor y que genera una sola señal sensible a la fuerza de avance que no está influenciada por irregularidades en la transmisión de potencia de la unidad del rotor y que proporciona una medida directa y verdadera de la fuerza de avance axial que se aplica realmente en el portabrocas.
Otros objetos y ventajas de la invención resultarán evidentes a partir de las siguientes especificaciones y reivindicaciones.
Una realización preferida de la invención se describe detalladamente a continuación haciendo referencia al dibujo adjunto.
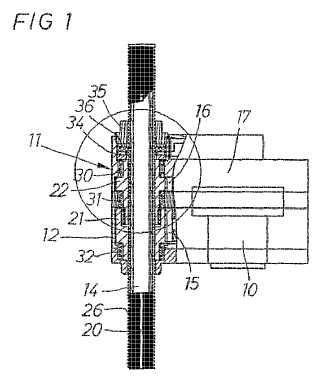
En el dibujo La Fig. 1 muestra una vista lateral de un aparato de perforación que incluye un portabrocas de acuerdo con la invención.
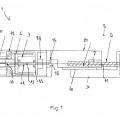
La Fig. 2 muestra, a mayor escala, una vista fraccionada del aparato de perforación de la Fig. 1.
El aparato de perforación ilustrado en los dibujos comprende un motor de rotación 10, una unidad portabrocas 11 que incluye una carcasa 12 y un portabrocas tubular 14, un mecanismo accionador de rotación del portabrocas 15, un mecanismo accionador de avance del portabrocas 16 y una transmisión de potencia 17 que conecta el motor 10 con el mecanismo accionador de rotación 15 y con el mecanismo accionador de avance 16. El mecanismo accionador de rotación 15 incluye un manguito accionador de rotación 21 que rodea al portabrocas 14 y que está unido axialmente a la carcasa 12. El mecanismo accionador de avance 16 comprende un manguito accionador de avance giratorio 22 que también rodea al portabrocas 14 y que está unido axialmente a la carcasa 12.
El manguito accionador de rotación 21 está provisto de proyecciones internas (no mostradas) y el portabrocas 14 está provisto de un par de chaveteros 20 que se extienden axialmente, en el que las proyecciones están destinadas a cooperar con los chaveteros 20 para transferir un par de torsión accionador de rotación al portabrocas 14 mientras permiten el movimiento axial del último. Además, el portabrocas 14 está provisto de una rosca de tornillo externa 26 para cooperar con una rosca interna 27 del manguito accionador de avance 22 para ejercer fuerzas axiales en el portabrocas 14 cuando este gire.
Este tipo de disposición accionadora de avance y de rotación del portabrocas es muy conocido y se ha descrito previamente en la Patente de Estados Unidos Nº 4.591.299 mencionada anteriormente así como en la Patente de Estados Unidos Nº 5.351.797. Por consiguiente, esta disposición accionadora del rotor no se describe detalladamente.
El manguito accionador de avance 22 y el manguito accionador de rotación 21 están soportados radialmente con respecto a la carcasa 12 mediante cojinetes 30, 31, 32 de tipo aguja que no pueden transferir ninguna fuerza axial entre los manguitos 22, 21 y la carcasa 12. Por el contrario, el manguito accionador de avance 22 está soportado axialmente con respecto a la carcasa 12 mediante un cojinete de empuje 34 que está situado entre el extremo trasero del manguito accionador de avance 22 y una pared 35 del extremo trasero de la carcasa 12. Entre el cojinete de empuje 34 y esta pared trasera 35 se proporciona un dispositivo de detección de fuerza axial en forma de una celda de carga 36 que está dispuesta para suministrar señales eléctricas en respuesta a las fuerzas axiales que se aplican en el portabrocas 14 mediante el manguito accionador de avance 22. Estas señales se reciben y tratan por una unidad de control y seguimiento no ilustrada de la operación de perforación que está conectada al motor accionador 10.
En esta realización de la invención, los cojinetes 30, 31 y 32 son de tipo aguja, que es un tipo adecuado de cojinete. Alternativamente, podrían usarse otros tipos de cojinetes de rodamiento o incluso cojinetes planos. Lo importante es que no transfieran ninguna carga axial desde la carcasa 12 al portabrocas 14.
Una ventaja significativa obtenida mediante la disposición de los cojinetes y el dispositivo de indicación de la fuerza axial de acuerdo con la invención es que se obtiene una indicación verdadera de la fuerza axial que se aplica realmente en el portabrocas 14 sin que ejerza ninguna influencia de que se produzca un mal funcionamiento en la transmisión de potencia entre el motor y el mecanismo accionador de avance 16.
El soporte radial del cojinete de aguja del manguito accionador de avance 22 también es ventajoso en cuanto a que la carga axial completa del portabrocas 14 se transfiere a la carcasa 12 mediante un solo cojinete de empuje 34 y en que puede usarse solo un dispositivo de detección de carga axial. Esto simplifica el tratamiento de la señal en la unidad de control y seguimiento de la operación de perforación.
Otra ventaja obtenida de la invención es que permite una dimensión de salida estrecha de la unidad portabrocas 11 porque la disposición del cojinete de aguja es muy compacta. Una unidad de perforación más estrecha proporciona una accesibilidad mejorada de la unidad de perforación en diferentes aplicaciones.
Debe mencionarse que las realizaciones de la invención no están limitadas al ejemplo descrito sino que pueden modificarse libremente dentro del alcance de las reivindicaciones. Por ejemplo, la celda de carga 36 de detección de fuerza axial puede ser de cualquier tipo adecuado. Uno de dichos tipos es un elemento piezoeléctrico.
Reivindicaciones:
1. Unidad portabrocas que comprende una carcasa (12) , un portabrocas (14) giratorio y desplazable longitudinalmente con respecto a la carcasa (12) y conectado a un motor accionador (10) , en la que el portabrocas (14) está provisto de chaveteros (20) que se extienden axialmente para cooperar con proyecciones internas de un manguito accionador de rotación (21) que rodea el portabrocas (14) y una rosca de tornillo (26) para cooperar con una rosca interna (27) de un manguito accionador de avance (22) que rodea el portabrocas (14) y cojinetes (30-3234) para el soporte radial y axial del portabrocas (14) con respecto a la carcasa (12) , caracterizado por que dichos cojinetes (30-32-34) comprenden • uno o más cojinetes radiales (30-32) para transferir fuerzas radiales solo entre la carcasa (12) y el manguito 10 accionador de avance (22) ,
• un solo cojinete de empuje (34) para transferir fuerzas axiales solo entre la carcasa (12) y el manguito accionador de avance (22) , en el que
• un dispositivo de detección de fuerza axial (36) está asociado con dicho cojinete de empuje (34) y está dispuesto para suministrar señales eléctricas sensibles a la fuerza axial.
3. Unidad de perforación de acuerdo con la reivindicación 1 o 2, en la que dichos cojinetes radiales (30-32) comprenden cojinetes de aguja.
(10) es un motor neumático.
Patentes similares o relacionadas:
Taladradora, sistema de taladradoras y empleo de una taladradora, del 10 de Junio de 2020, de Johannes Lübbering GmbH: Taladradora con un husillo configurado para el accionamiento rotatorio de una broca ajustable o aplicable, el cual con un medio de accionamiento del giro que actúa […]
Dispositivo para aplicar una fuerza de presión a un elemento de fijación, del 26 de Febrero de 2020, de BALTEC MASCHINENBAU AG: Un dispositivo para actuar sobre un elemento de fijación con una fuerza aplicada, de modo que el elemento de fijación sufre deformación plástica […]
 Accionamiento de herramienta con árbol de husillo y procedimiento operativo, del 25 de Septiembre de 2019, de LTI Motion GmbH: Procedimiento operativo para un accionamiento de herramienta con árbol de husillo para un mecanizado de formación de viruta, que comprende al menos un actuador […]
Accionamiento de herramienta con árbol de husillo y procedimiento operativo, del 25 de Septiembre de 2019, de LTI Motion GmbH: Procedimiento operativo para un accionamiento de herramienta con árbol de husillo para un mecanizado de formación de viruta, que comprende al menos un actuador […]
Máquina-herramienta, del 8 de Octubre de 2018, de AMVALOR: Máquina de mecanizado que comprende un bastidor en el cual un árbol de accionamiento de una herramienta está montado para articular alrededor de un […]
Procedimiento de mecanizado, del 21 de Marzo de 2018, de Mitis: Procedimiento de mecanizado para realizar al menos un mecanizado de forma, que comprende: a) la realización de un mecanizado, particularmente axial, […]
Máquina herramienta con motor a bordo, del 11 de Enero de 2017, de Innse-Berardi S.p.A: Máquina herramienta que comprende: - un montante que tiene una extensión predominante a lo largo de un eje vertical (Y) perpendicular […]
Dispositivo de mecanizado vibratorio, del 13 de Abril de 2016, de CENTRE TECHNIQUE DES INDUSTRIES MECANIQUES: Dispositivo de mecanizado que comprende un bastidor, un árbol de transmisión que discurre a lo largo de un eje (A) y apto para ser acoplado a una […]
 Dispositivo portátil de mecanizado, de modo más particular de perforación, del 30 de Noviembre de 2015, de Advanced Electrical Tools: Dispositivo portátil de mecanizado, en particular de perforación, que presenta un mecanismo que comprende:
- un primer soporte que embarca:
- […]
Dispositivo portátil de mecanizado, de modo más particular de perforación, del 30 de Noviembre de 2015, de Advanced Electrical Tools: Dispositivo portátil de mecanizado, en particular de perforación, que presenta un mecanismo que comprende:
- un primer soporte que embarca:
- […]