Unidad de máquina-herramienta manual.
Unidad de máquina-herramienta manual con un dispositivo de marcaje (60,
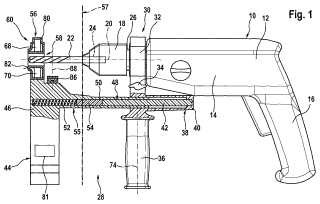
90) para indicar un marcaje sobre unapieza de trabajo (62) y una unidad de acoplamiento (30) para acoplarse a una máquina-herramienta manual (10), asícomo con una unidad de orientación (86, 94) que se usa para orientar el dispositivo de marcaje (60, 90),caracterizada por un medio portante (55) para el dispositivo de marcaje (60, 90) que, en el estado de acoplamiento auna máquina-herramienta manual (10), engrana en una región de alojamiento de herramienta (57) de la máquinaherramientamanual (10), en donde el dispositivo de marcaje (60, 90) abraza un eje de herramienta de la máquinaherramientamanual.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E07113167.
Solicitante: ROBERT BOSCH GMBH.
Nacionalidad solicitante: Alemania.
Dirección: POSTFACH 30 02 20 70442 STUTTGART ALEMANIA.
Inventor/es: TIEDE,STEFFEN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B23Q17/22 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B23 MAQUINAS-HERRAMIENTAS; TRABAJO DE METALES NO PREVISTO EN OTRO LUGAR. › B23Q PARTES CONSTITUTIVAS, DISPOSITIVOS O ACCESORIOS DE MAQUINAS HERRAMIENTAS, p. ej. DISPOSITIVOS PARA COPIAR O CONTROLAR (herramientas del tipo utilizado en tornos o máquinas de agujerear B23B 27/00 ); MAQUINAS HERRAMIENTAS DE UTILIZACION GENERAL, CARACTERIZADAS POR LA ESTRUCTURA DE CIERTAS PARTES CONSTITUTIVAS O DISPOSITIVOS; COMBINACIONES O ASOCIACIONES DE MAQUINAS PARA TRABAJAR EL METAL NO DESTINADAS A UN TRABAJO EN PARTICULAR. › B23Q 17/00 Dispositivos para indicar o medir sobre las máquinas herramientas (para el control automático o la regulación del movimiento de avance, de la velocidad de corte o de la posición de la herramienta o de la pieza B23Q 15/00). › para indicar o medir la posición existente o deseada de la herramienta o la pieza de trabajo.
- B23Q17/24 B23Q 17/00 […] › utilizando medios ópticos.
- B25F5/02 B […] › B25 HERRAMIENTAS MANUALES; HERRAMIENTAS DE MOTOR PORTATILES; MANGOS PARA UTENSILIOS MANUALES; UTILLAJE DE TALLER; MANIPULADORES. › B25F HERRAMIENTAS COMBINADAS O PARA TRABAJOS MULTIPLES NO PREVISTAS EN OTRO LUGAR; DETALLES O PARTES CONSTITUTIVAS DE HERRAMIENTAS PORTATILES CON MOTOR NO RELACIONADAS PARTICULARMENTE CON LAS OPERACIONES EFECTUADAS Y NO PREVISTAS EN OTRO LUGAR. › B25F 5/00 Detalles o partes constitutivas de herramientas portátiles con motor no relacionadas particularmente con las operaciones efectuadas y no previstas en otro lugar. › Construcción de carcasas, cuerpos o empuñaduras.
- B25H1/00 B25 […] › B25H UTILLAJE DE TALLER, p. ej. PARA EL TRAZADO DE LAS PIEZAS QUE VAN A SER TRABAJADAS; DISPOSICION DE LOS TALLERES. › Bancos; Estantes o soportes portátiles para disponer las herramientas portátiles o las piezas que van a ser trabajadas.
PDF original: ES-2402068_T3.pdf
Fragmento de la descripción:
Unidad de máquina-herramienta manual
La invención se basa en una unidad de máquina-herramienta manual con un dispositivo de marcaje, según el preámbulo de la reivindicación 1.
Se conoce una máquina-herramienta manual con un dispositivo de marcaje. Mediante el dispositivo de marcaje puede indicarse un marcaje sobre una pieza de trabajo a mecanizar mediante la máquina-herramienta manual.
Del documento WO 2006/074609 A1 se conoce un dispositivo para determinar la inclinación de una herramienta, como por ejemplo una taladradora eléctrica, en el que una señal de marcaje, la cual se emite desde un láser unido a la máquina, define una línea horizontal mediante una lente configurada como péndulo de oscilación libre. La lente configurada como lente cilíndrica del dispositivo del D1 despliega el rayo láser en el plano horizontal, de tal modo que en el caso de una orientación horizontal de la máquina-herramienta con respecto a la horizontal se traza una línea de marcaje horizontal sobre la pieza de trabajo a mecanizar. Si se inclina la máquina-herramienta con un ángulo determinado con respecto a la horizontal y de este modo con respecto al péndulo de lente, el rayo láser que atraviesa la lente genera sobre la pieza de trabajo a mecanizar un marcaje curvado, que debe contemplarse como un indicador de la inclinación de la máquina-herramienta. El dispositivo de marcaje del D1 se compone con ello de un diodo láser montado sobre la carcasa de máquina de la máquina-herramienta, así como de una lente cilíndrica colocada sobre una “estructura de caballete” delante del diodo láser.
Del documento EP 1249291 A2 se conoce una ayuda de posicionamiento para aparatos de herramienta manual, la cual presenta un sistema de medición de distancia sin contacto con al menos un sensor de medición de distancia para medir la distancia entre el sensor de medición de distancia y un objeto, a lo largo de una dirección de medición. En el caso del dispositivo del D2 no se trata por lo tanto de un dispositivo de marcaje para indicar un marcaje sobre una pieza de trabajo, sino más bien de un dispositivo para determinar la distancia entre la máquina, respectivamente el sensor de medición de distancia, y una pieza de trabajo, respectivamente para determinar la distancia en tres coordenadas ortogonales con relación al sistema de medición de distancia. En un ejemplo de ejecución del dispositivo del D2 un sensor de medición de distancia del sistema de medición de distancia con un diodo láser, que oscila como medio de desvío mediante un brazo soporte electromecánico y explora una región de escaneado, está fijado a una cabeza de aspiración, aplicada a la superficie de pieza de trabajo de una aspiración de polvo de un aparato de herramienta manual, la cual es móvil y está pretensada de forma axialmente elástica.
Del documento US 2004/0093749 A1 se conoce una empuñadura auxiliar para una taladradora, la cual permite la orientación de la máquina-herramienta mediante una señal óptica. Para esto está dispuesto sobre la empuñadura auxiliar un diodo láser, el cual genera mediante una óptica cilíndrica una señal luminosa en forma de abanico, la cual a su vez provoca sobre una pieza de trabajo una línea de marcaje. En un ejemplo de ejecución de este dispositivo, la empuñadura auxiliar posee otra estructura auxiliar con un segundo diodo láser, que permite para una óptica correspondiente generar una segunda línea de marcaje sobre la pieza de trabajo a mecanizar.
Ventajas de la invención La invención se basa en una unidad de máquina-herramienta manual con un dispositivo de marcaje para indicar un marcaje sobre una pieza de trabajo y una unidad de acoplamiento para acoplarse a una máquina-herramienta manual.
Se propone que la unidad de máquina-herramienta manual presente una unidad de orientación, que se usa para orientar el dispositivo de marcaje. Por medio de esto pueden conseguirse una elevada comodidad de manejo y una mecanización precisa y rápida de la pieza de trabajo. De forma ventajosa la unidad de orientación se usa para, mediante un eje de referencia, orientar el dispositivo de marcaje en una posición nominal necesaria para una orientación nominal del marcaje. El eje de referencia es de forma ventajosa un eje fijo con relación a la pieza de trabajo, que se usa para comparar una posición real del dispositivo de marcaje con su posición nominal a conseguir. De forma preferida el eje de referencia se corresponde con un eje prefijado mediante una fuerza física, como por ejemplo el eje de gravedad. La unidad de orientación presenta convenientemente un medio, que está previsto para al menos tener en cuenta el eje de referencia para una orientación del dispositivo de marcaje en la posición nominal. El medio se usa con ello de forma ventajosa para tener en cuenta una desviación entre la posición real y la posición nominal del dispositivo de marcaje. Por ejemplo el medio puede entregar una información sobre esta desviación o el medio puede estar previsto para una orientación al menos parcialmente automática, de forma preferida completamente automática, del dispositivo de marcaje con base en esta desviación. En el estado de acoplamiento de la unidad de máquina-herramienta manual a una máquina-herramienta manual, la orientación del dispositivo de marcaje puede llevarse a cabo sin tener que usar para ello un medio adicional a la máquina-herramienta manual, para prefijar el eje de referencia, como por ejemplo un medio de nivelación adicional.
La unidad de orientación puede usarse para una orientación manual del dispositivo de marcaje con relación a la pieza de trabajo. Para esto la unidad de orientación presenta de forma preferida un dispositivo de nivelación, a través de la cual puede informarse al usuario sobre una posición real del dispositivo de marcaje con relación a la posición nominal a conseguir. Este dispositivo de nivelación está montado convenientemente de forma fija con el dispositivo de marcaje. El usuario puede comparar mediante el dispositivo de nivelación directamente la posición real y la posición nominal, como por ejemplo en el caso de un nivel de burbuja, y/o puede entregarse al usuario una señal de información óptica y/o acústica sobre la posición real del dispositivo de marcaje, sobre una desviación de la posición real respecto a la posición nominal y sobre la consecución de la posición nominal deseada, etc.
Para detectar un estado de orientación del dispositivo de marcaje con relación a la posición nominal puede usarse un medio sensorial. Con ello pueden usarse por ejemplo medios sensoriales, que detectan una variación de capacidad y/o una variación de conductividad a través del movimiento de un cuerpo móvil, como por ejemplo el movimiento de un péndulo. Los medios sensoriales pueden estar también ejecutados como estructuras de silicio micro-mecánicas (MEMS o Micro-Electro-Mechanical System) . Aparte de esto son concebibles otros sensores, que contengan un electrolito y detecten las informaciones de orientación conductométricamente o capacitivamente. Asimismo los medios sensoriales pueden estar configurados como sensores Hall, que se orientan con el campo magnético terrestre o con el campo magnético de un imán permanente móvil. Además de esto es concebible el uso de niveles de burbuja, que se leen mediante elementos constructivos opto-electrónicos.
Además de esto, la unidad de orientación puede estar prevista para orientar el dispositivo de marcaje al menos parcialmente de modo automático, de forma preferida completamente de modo automático, en una posición nominal necesaria para una orientación nominal del marcaje con relación al eje de referencia, con lo que pueda conseguirse una comodidad de manejo especialmente elevada. Para esto la unidad de orientación presenta de forma preferida una unidad de accionamiento, que está prevista para accionar un movimiento del dispositivo de marcaje con relación a la pieza de trabajo y/o, en el estado de acoplamiento de la unidad de máquina-herramienta manual a una máquinaherramienta manual, con relación a la máquina-herramienta manual. Puede usarse una unidad de orientación económica si ésta está prevista para el accionamiento mediante la gravedad.
Puede conseguirse constructivamente de forma sencilla una orientación al menos parcialmente automática del dispositivo de marcaje, si la unidad de orientación presenta al menos un medio de desacoplamiento el cual, en el estado de acoplamiento de la unidad de máquina-herramienta manual a una máquina-herramienta manual, está previsto para desacoplar el dispositivo de marcaje respecto a la máquina-herramienta manual en al menos un grado de libertad. Por medio de esto puede mantenerse, en el caso de un movimiento... [Seguir leyendo]
Reivindicaciones:
1. Unidad de máquina-herramienta manual con un dispositivo de marcaje (60, 90) para indicar un marcaje sobre una pieza de trabajo (62) y una unidad de acoplamiento (30) para acoplarse a una máquina-herramienta manual (10) , así como con una unidad de orientación (86, 94) que se usa para orientar el dispositivo de marcaje (60, 90) , caracterizada por un medio portante (55) para el dispositivo de marcaje (60, 90) que, en el estado de acoplamiento a una máquina-herramienta manual (10) , engrana en una región de alojamiento de herramienta (57) de la máquinaherramienta manual (10) , en donde el dispositivo de marcaje (60, 90) abraza un eje de herramienta de la máquinaherramienta manual.
2. Unidad de máquina-herramienta manual según la reivindicación 1, caracterizada porque la unidad de orientación
(94) presenta al menos un medio de desacoplamiento (97) el cual, en el estado de acoplamiento a una máquinaherramienta manual (10) , está previsto para desacoplar el dispositivo de marcaje (90) respecto a la máquinaherramienta manual (10) en al menos un grado de libertad.
3. Unidad de máquina-herramienta manual según la reivindicación 1 ó 2, caracterizada porque mediante el medio portante (55) , el dispositivo de marcaje (60, 90) está dispuesto en la región de un eje de herramienta (20) de la máquina-herramienta manual (10) .
4. Unidad de máquina-herramienta manual según una de las reivindicaciones anteriores, caracterizada por una unidad de paso (56, 100) que está prevista para hacer pasar una herramienta (22) , a la cual está acoplado directamente el dispositivo de marcaje (60, 90) .
5. Unidad de máquina-herramienta manual según una de las reivindicaciones anteriores, caracterizada por un medio de apoyo (82) , el cual está dispuesto para apoyarse en la pieza de trabajo (62) .
6. Unidad de máquina-herramienta manual según una de las reivindicaciones anteriores, caracterizada por una unidad (108) , que está prevista para, en el caso de una mecanización de la pieza de trabajo (62) , mantener una separación entre el dispositivo de marcaje (60, 90) y la pieza de trabajo (62) .
7. Unidad de máquina-herramienta manual según una de las reivindicaciones anteriores, caracterizada por un medio de soporte (98) giratorio mediante el cual, en el estado de acoplamiento a una máquina-herramienta manual (10) , el dispositivo de marcaje (90) está montado de forma giratoria con relación a la máquina-herramienta manual (10) .
8. Unidad de máquina-herramienta manual según una de las reivindicaciones anteriores, caracterizada por una unidad de desacoplamiento de oscilaciones (52) que está prevista para, en el estado de acoplamiento a la máquinaherramienta manual (10) , actuar en contra de una transmisión de oscilaciones de la máquina-herramienta manual
(10) al dispositivo de marcaje (60, 90) .
9. Unidad de máquina-herramienta manual según una de las reivindicaciones anteriores, caracterizada por la configuración como unidad accesoria de máquina-herramienta manual, que está prevista para desacoplarse de un cuerpo base de máquina-herramienta manual (12) .
10. Máquina-herramienta manual con una unidad de máquina-herramienta manual (28) según una de las reivindicaciones 1 a 9.
Patentes similares o relacionadas:
 Dispositivo de alineación para herramientas de torneado, del 29 de Julio de 2020, de GÜHRING KG: Dispositivo de alineación para disponer sobre una herramienta de torneado, , en particular sobre un vástago de herramienta o una punta […]
Dispositivo de alineación para herramientas de torneado, del 29 de Julio de 2020, de GÜHRING KG: Dispositivo de alineación para disponer sobre una herramienta de torneado, , en particular sobre un vástago de herramienta o una punta […]
Dispositivo de mandril y método, del 18 de Marzo de 2020, de In-Situ Oilfield Services Limited: Un dispositivo de mandril que tiene al menos dos mandíbulas para agarrar un objeto (T), y un mecanismo de ajuste configurado para ajustar el centro rotacional […]
Procedimiento para el mecanizado de los bordes de piezas de trabajo en forma de placa, del 19 de Febrero de 2020, de IMA Schelling Deutschland GmbH: Procedimiento para el mecanizado de los bordes de piezas de trabajo en forma de placa, donde las piezas de trabajo se suministran en un circuito […]
Aparato seguidor del contorno y sistemas y métodos relacionados, del 1 de Enero de 2020, de FLOW INTERNATIONAL CORPORATION: Un conjunto de cardan para una máquina multieje para ayudar al mantenimiento de una relación espacial entre una herramienta de la máquina multieje y una […]
Accesorio de centrado de útiles sobre una máquina de mecanizado, procedimiento de centrado y dispositivo de ayuda para el centrado que incluye tal accesorio, del 20 de Noviembre de 2019, de Wibemo S.A: Accesorio de centrado de un útil (O) o de un husillo porta-útiles sobre un eje de rotación X-X` de un cañón giratorio de una máquina de mecanizado, caracterizado […]
Módulo de mecanización, conjunto de accesorio para módulo de mecanización, y procedimiento de puesta en marcha de un módulo de mecanización, del 9 de Octubre de 2019, de Watch Out SA: Conjunto de accesorios para módulo de mecanización por arrancado de virutas, que comprende: por lo menos un portaherramientas provisto de una […]
Procedimiento y dispositivo para detectar y corregir una ubicación espacial de una pieza de trabajo sostenida en un dispositivo de posicionamiento, del 4 de Septiembre de 2019, de JENOPTIK AUTOMATISIERUNGSTECHNIK GMBH: Procedimiento para detectar y corregir una ubicación espacial de una pieza de trabajo no simétrica en rotación sostenida en un dispositivo de posicionamiento […]
 Dispositivo y procedimiento para la sincronización del movimiento de un medio de mecanizado automático con el movimiento de una pieza de trabajo, del 31 de Julio de 2019, de SIEMENS AKTIENGESELLSCHAFT: Dispositivo para la sincronización del movimiento de un medio de mecanizado automático (BM) con el movimiento de una pieza de trabajo (WS) transportada durante el mecanizado […]
Dispositivo y procedimiento para la sincronización del movimiento de un medio de mecanizado automático con el movimiento de una pieza de trabajo, del 31 de Julio de 2019, de SIEMENS AKTIENGESELLSCHAFT: Dispositivo para la sincronización del movimiento de un medio de mecanizado automático (BM) con el movimiento de una pieza de trabajo (WS) transportada durante el mecanizado […]