Aparato de transporte y método para transportar objetos.
Aparato de transporte (1) para objetos (2), que comprende
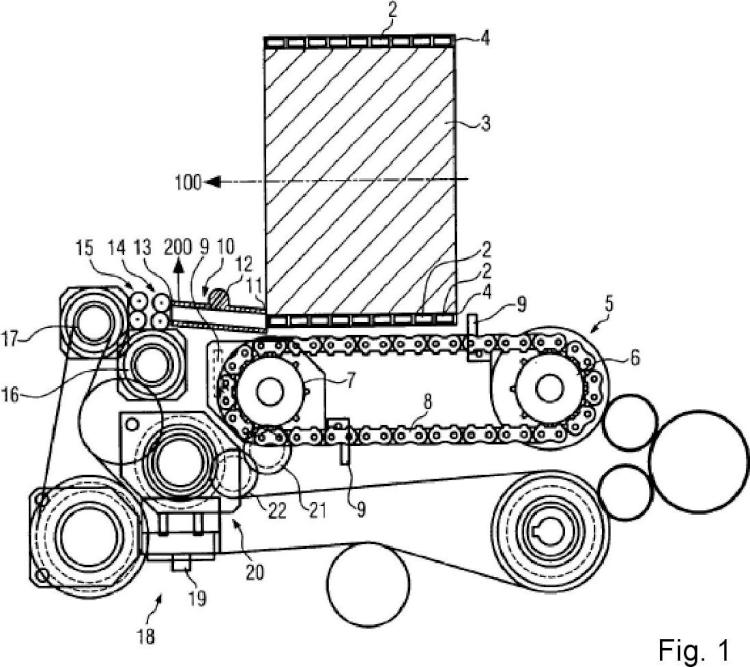
un primer medio de transporte (3) con una pluralidad de medios de contención (4) para objetos,
en donde el medio de transporte (3) transporta los objetos (2) a lo largo de una primera trayectoria de movimiento, y un segundo medio de transporte (5) para retirar los objetos (2) de al menos un medio de contención (4) del medio de transporte (3) a lo largo de una segunda trayectoria de movimiento, que es diferente de la primera trayectoria de movimiento,
caracterizado porque
un medio de recogida (10) que se adapta para recibir los objetos (2) a lo largo de la segunda trayectoria de movimiento, mientras se adapta para seguir el movimiento del primer medio de transporte (3) a lo largo de la primera trayectoria de movimiento mientras recibe los objetos (2) transferidos a lo largo de la segunda trayectoria de movimiento, en donde el medio de recogida (10) se adapta para moverse en la dirección esencialmente opuesta a la primera trayectoria de movimiento del primer medio de transporte (3) después de recibir los objetos (2) de al menos.
Tipo: Patente Internacional (Tratado de Cooperación de Patentes). Resumen de patente/invención. Número de Solicitud: PCT/EP2012/002485.
Solicitante: PHILIP MORRIS PRODUCTS S.A..
Nacionalidad solicitante: Suiza.
Dirección: QUAI JEANRENAUD 3 2000 NEUCHATEL SUIZA.
Inventor/es: SANNA,DANIELE, FERRAZZIN,DIEGO, PAGNONI,MICHELE, ZAPPOLI,STEFANO.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A24D3/02 NECESIDADES CORRIENTES DE LA VIDA. › A24 TABACO; PUROS; CIGARRILLOS; DISPOSITIVOS PARA SIMULAR LA ACCIÓN DE FUMAR; ARTICULOS PARA FUMADORES. › A24D PUROS; CIGARRILLOS; FILTROS PARA EL HUMO DEL TABACO; BOQUILLAS DE PUROS O DE CIGARRILLOS; FABRICACION DE LOS FILTROS PARA EL HUMO DEL TABACO O DE BOQUILLAS. › A24D 3/00 Filtros para el humo del tabaco, p. ej. boquillas filtrantes, guarniciones filtrantes; Filtros especialmente adaptados para dispositivos para simular la acción de fumar; Boquillas para puros o cigarrillos (boquillas para pipas, puros o cigarrillos A24F 7/00). › Fabricación de filtros para humo de tabaco (fabricación de papel o de materiales celulósicos para filtros D21).
PDF original: ES-2553528_T3.pdf

Patentes similares o relacionadas:
Método y aparato para el tratamiento de material tipo lámina continua, del 19 de Febrero de 2020, de PHILIP MORRIS PRODUCTS S.A.: Método para tratar un material tipo lámina continua para uso en la fabricación de artículos en forma de varilla , el método que comprende las etapas de: - proporcionar […]
Método y aparato para conformar material continuo sustancialmente plano, del 5 de Febrero de 2020, de PHILIP MORRIS PRODUCTS S.A.: Aparato para conformar un material continuo sustancialmente plano que tiene una temperatura de transición vítrea por debajo de 150 grados […]
Artículo para fumar con humo de la corriente lateral reducido, del 6 de Noviembre de 2019, de PHILIP MORRIS PRODUCTS S.A.: Un artículo para fumar que comprende una varilla de tabaco y un filtro conectado a la varilla de tabaco , el filtro comprende […]
 Aparato y método para suministrar una trama continua de material de lámina rizada, del 30 de Octubre de 2019, de PHILIP MORRIS PRODUCTS S.A.: Un aparato para suministrar una trama continua de material de lámina rizada a un dispositivo formador de la varilla para la producción de filtros para artículos […]
Aparato y método para suministrar una trama continua de material de lámina rizada, del 30 de Octubre de 2019, de PHILIP MORRIS PRODUCTS S.A.: Un aparato para suministrar una trama continua de material de lámina rizada a un dispositivo formador de la varilla para la producción de filtros para artículos […]
Cápsulas de sabor para artículos para fumar, del 9 de Octubre de 2019, de PHILIP MORRIS PRODUCTS S.A.: Un artículo para fumar que comprende: un material para fumar; y un filtro aguas abajo del material para fumar, en donde el filtro comprende una cápsula […]
Procedimiento para medir la masa de un plastificante y la humedad en una varilla de filtro, del 9 de Octubre de 2019, de TEWS Elektronik GmbH & Co. KG: Procedimiento para medir la masa de un plastificante y el contenido de humedad en una varilla de filtro que presenta las siguientes etapas: • la masa total […]
Método y aparato para fabricar una trama rizada, del 9 de Octubre de 2019, de PHILIP MORRIS PRODUCTS S.A.: Un métodos de fabricación de una trama rizada para un artículo generador de aerosol , el método comprende las etapas de: introducir una trama esencialmente […]
Artículo generador de aerosol con saborizante dispersado, del 28 de Agosto de 2019, de PHILIP MORRIS PRODUCTS S.A.: Un artículo generador de aerosol que comprende: un sustrato generador de aerosol; una boquilla que comprende al menos un segmento de material de […]