Transmisión de variación continua controlada electrónicamente.
Una transmisión (20) de variación continua controlada electrónicamente que comprende:
un mecanismo (20a) de cambio de velocidad que tiene un eje (21d) de entrada, un eje (22d) de salida, y unaccionador (30) para cambiar una relación de cambio de velocidad entre el eje (21d) de entrada y el eje (22d) de salida;
una unidad (9) de control para controlar el accionador (30);
un sensor (41) de velocidad de rotación del eje de salida para detectar una velocidad de rotación del eje (22d)de salida y emitir la velocidad de rotación del eje (22d) de salida a la unidad (9) de control; y
un embrague (25) centrífugo conectado al eje (22d) de salida, estando el embrague (25) centrífugo configuradopara transmitir la rotación del eje (22d) de salida a una rueda (3) motriz o rueda trasera;
en la que la unidad (9) de control está adaptada para controlar el accionador (30) en base a una relación decambio de velocidad objetivo obtenida dividiendo una velocidad de rotación objetivo del eje (21d) de entradapor la velocidad de rotación del eje (22d) de salida, de tal manera que la relación de cambio de velocidadobjetivo varía con el deterioro del embrague (25) centrífugo.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E08250971.
Solicitante: YAMAHA HATSUDOKI KABUSHIKI KAISHA.
Nacionalidad solicitante: Japón.
Dirección: 2500 SHINGAI IWATA-SHI, SHIZUOKA 438-8501 JAPON.
Inventor/es: ISHIOKA,KAZUTOSHI.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- F16H61/662 MECANICA; ILUMINACION; CALEFACCION; ARMAMENTO; VOLADURA. › F16 ELEMENTOS O CONJUNTOS DE TECNOLOGIA; MEDIDAS GENERALES PARA ASEGURAR EL BUEN FUNCIONAMIENTO DE LAS MAQUINAS O INSTALACIONES; AISLAMIENTO TERMICO EN GENERAL. › F16H TRANSMISIONES. › F16H 61/00 Funciones internas de las unidades de control para cambios de velocidad o para mecanismos de inversión de las transmisiones que transmiten un movimiento rotativo. › con órganos flexibles sin fin.
PDF original: ES-2400169_T3.pdf
Fragmento de la descripción:
Transmisión de variación continua controlada electrónicamente Campo de la invención La presente invención se refiere a una transmisión de variación continua controlada electrónicamente, a una unidad de potencia que tiene una transmisión de este tipo, a un vehículo, a un controlador para una transmisión de variación continua controlada electrónicamente, y a un procedimiento de control de una transmisión de variación continua controlada electrónicamente.
Antecedentes de la invención El documento WO 2006/009014 desvela un procedimiento de control de una transmisión de variación continua de correa controlada electrónicamente (una transmisión de variación continua controlada electrónicamente se denomina “ECVT” en lo sucesivo en el presente documento) como se describe a continuación.
Una relación de cambio de velocidad objetivo se determina por una señal de abertura del estrangulador y una señal de velocidad del vehículo. Una posición de polea objetivo de una media polea móvil de una polea primaria se calcula a partir de la relación de cambio de velocidad objetivo determinada. A continuación, una tensión tal que la media polea móvil de la polea primaria se desplaza a la posición de polea objetivo calculada se aplica a un motor eléctrico para accionar la media polea móvil de la polea primaria. De este modo, se controla la relación de cambio de velocidad para alcanzar la relación de cambio de velocidad objetivo.
Sin embargo, se produce un problema en el procedimiento de control de la relación de cambio de velocidad, desvelado en el documento WO 2006/009014. Es decir, a medida que un embrague centrífugo dispuesto entre un eje de salida de la ECVT y la rueda motriz se desgasta con el tiempo, un régimen de motor aumenta durante un funcionamiento a baja velocidad. Dicho problema de un aumento en el régimen de motor se produce especialmente al ralentí.
Otro ejemplo de una transmisión se describe por el documento US2004171445, que describe una transmisión de variación continua de estilo correa en V accionada hidráulicamente. Una sección de control de cambio de un controlador de transmisión determina una velocidad de entrada objetivo de la transmisión en base a un mapa de cambio predeterminado usando una velocidad del vehículo que puede determinarse a partir de la velocidad de revolución de la polea secundaria y una cantidad de depresión del pedal del acelerador. La sección de control de cambio determina una relación de transmisión objetivo dividiendo la velocidad de entrada objetivo por la velocidad de revolución de la polea secundaria. La sección de control de cambio calcula una relación de transmisión real dividiendo la velocidad de revolución de la polea primaria por la velocidad de revolución de la polea secundaria y determina una velocidad de cambio para llevar gradualmente la relación de transmisión real cerca de la relación objetivo a una velocidad de cambio objetivo mientras que se realiza una compensación de la alteración de acuerdo con una diferencia entre una relación de transmisión real y la relación de transmisión objetivo. Cuando una relación de transmisión real se lleva gradualmente cerca de la relación de transmisión objetivo, la relación de transmisión objetivo se logra estableciendo una relación de transmisión intermedia entre la relación de transmisión real y la relación de transmisión objetivo.
Un ejemplo adicional se describe en el documento EP0895005, que describe una transmisión de variación continua de tipo correa en V. Una señal desde un sensor de rotación del eje de entrada, que detecta una velocidad de rotación de entrada de la polea primaria, es decir, el eje de entrada de la transmisión, y una señal desde un sensor de rotación del eje de salida, que detecta una velocidad de rotación del eje de salida de la polea secundaria, es decir, una velocidad de rotación del eje de salida de la transmisión, se introducen en una unidad de control. Una unidad de cálculo de velocidad de rotación del eje de entrada objetivo de la unidad de control calcula una velocidad de rotación del eje de entrada objetivo de acuerdo con una velocidad del vehículo en base a la velocidad de rotación del eje de salida desde el sensor de rotación de polea secundaria y la abertura del estrangulador desde el sensor de abertura del estrangulador. La unidad de cálculo de velocidad de rotación del eje de entrada objetivo también calcula una cantidad de variación de la velocidad de rotación del eje de entrada objetivo. Una unidad de cálculo de relación de velocidad objetivo de la unidad de control divide la velocidad de rotación del eje de entrada objetivo por la velocidad de rotación del eje de salida detectada, y calcula una relación de velocidad objetivo. Una unidad de cálculo de relación de velocidad de órdenes calcula una relación de velocidad de órdenes en base a la relación de velocidad objetivo y una constante de tiempo de característica dinámica. La relación de velocidad de órdenes se determina de tal manera que una relación de velocidad real sigue a la relación de velocidad objetivo con las características dinámicas determinadas. Una unidad de cálculo de valor de órdenes de motor paso a paso calcula una salida de valor de órdenes hacia un motor paso a paso que controla la relación de transmisión en base a la relación de velocidad de órdenes desde la unidad de cálculo de relación de velocidad de órdenes, la velocidad de rotación del eje de salida y la velocidad de rotación del eje de entrada.
Otro ejemplo de una transmisión se describe en el documento US2004/235615. Este documento, que representa la técnica anterior más cercana, describe una motocicleta que incluye un mecanismo de embrague centrífugo dispuesto entre la transmisión y una rueda trasera, para la conexión y desconexión entre un motor y la rueda trasera.
Una ECU de la motocicleta almacena un mapa de transmisión de uso al ralentí y un mapa de transmisión de uso en marcha, y realiza un control de transmisión de la transmisión en base al mapa de transmisión de uso al ralentí en el arranque del motor, y cambia el mapa de transmisión de uso al ralentí al mapa de transmisión de uso en marcha cuando se satisface al menos una de entre una primera condición en la que un período de tiempo predeterminado preestablecido en base a la temperatura del motor ha transcurrido después del arranque del motor, y una segunda condición en la que la velocidad de rotación del motor es inferior a un régimen de motor al ralentí predeterminado. Un medio de almacenamiento de la ECU almacena los mapas de transmisión, comprendiendo cada mapa de transmisión valores de relación de transmisión predeterminados establecidos en asociación con la abertura de válvula del estrangulador y la velocidad del vehículo. Una CPU de la ECU busca el mapa de transmisión para recuperar un valor de relación de transmisión correspondiente a los valores de la abertura de válvula del estrangulador, la velocidad de rotación del motor, y la velocidad del vehículo detectados respectivamente por un sensor de posición del estrangulador, un sensor de régimen de motor y un sensor de velocidad del vehículo, y acciona un motor CVT para cambiar la relación de transmisión de la CVT al valor de relación de transmisión recuperado, controlando de este modo la relación de transmisión de la CVT.
La presente invención se hace en vista del problema anterior, y un objetivo de la invención es evitar un aumento en el régimen de motor durante el funcionamiento a baja velocidad.
Sumario de la invención Los aspectos de la presente invención se establecen en las reivindicaciones independientes. Las características preferidas de la invención se establecen en las reivindicaciones dependientes.
En el presente documento se describe una transmisión de variación continua controlada electrónicamente, que incluye: un mecanismo de cambio de velocidad; un embrague centrífugo; una unidad de control; y un sensor de velocidad de rotación del eje de salida. El mecanismo de cambio de velocidad tiene un eje de entrada, un eje de salida y un accionador. El accionador cambia una relación de cambio de velocidad entre el eje de entrada y el eje de salida. El embrague centrífugo está conectado al eje de salida. El embrague centrífugo está configurado para transmitir la rotación del eje de salida a una rueda motriz o rueda trasera. La unidad de control está adaptada para controlar el accionador. El sensor de velocidad de rotación del eje de salida detecta una velocidad de rotación del eje de salida. El sensor de velocidad de rotación del eje de salida emite la velocidad de rotación detectada del eje de salida a la unidad de control. La unidad de control está adaptada para controlar... [Seguir leyendo]
Reivindicaciones:
1. Una transmisión (20) de variación continua controlada electrónicamente que comprende:
un mecanismo (20a) de cambio de velocidad que tiene un eje (21d) de entrada, un eje (22d) de salida, y un accionador (30) para cambiar una relación de cambio de velocidad entre el eje (21d) de entrada y el eje (22d) de salida; una unidad (9) de control para controlar el accionador (30) ; un sensor (41) de velocidad de rotación del eje de salida para detectar una velocidad de rotación del eje (22d) de salida y emitir la velocidad de rotación del eje (22d) de salida a la unidad (9) de control; y un embrague (25) centrífugo conectado al eje (22d) de salida, estando el embrague (25) centrífugo configurado para transmitir la rotación del eje (22d) de salida a una rueda (3) motriz o rueda trasera; en la que la unidad (9) de control está adaptada para controlar el accionador (30) en base a una relación de cambio de velocidad objetivo obtenida dividiendo una velocidad de rotación objetivo del eje (21d) de entrada por la velocidad de rotación del eje (22d) de salida, de tal manera que la relación de cambio de velocidad objetivo varía con el deterioro del embrague (25) centrífugo.
2. La transmisión (20) de acuerdo con la reivindicación 1, que comprende además un sensor (43) de velocidad de rotación del eje de entrada para detectar una velocidad de rotación del eje (21d) de entrada y emitir la velocidad de rotación del eje (21d) de entrada a la unidad (9) de control, en la que la unidad (9) de control está adaptada para controlar el accionador (30) de tal manera que se reduce una diferencia entre la relación de cambio de velocidad objetivo y una relación de cambio de velocidad real obtenida dividiendo la velocidad de rotación del eje (21d) de entrada por la velocidad de rotación del eje (22d) de salida.
3. La transmisión (20) de acuerdo con la reivindicación 2, en la que la unidad (9) de control está adaptada para controlar el accionador (30) de tal manera que la relación de cambio de velocidad real y la relación de cambio de velocidad objetivo sean aproximadamente iguales.
4. La transmisión (20) de acuerdo con la reivindicación 1, 2 o 3, en la que el mecanismo (20a) de cambio de velocidad comprende además:
una polea (21) primaria que incluye un media polea (21a) fija primaria fijada en relación con el eje (21d) de entrada, y una media polea (21b) móvil primaria opuesta a la media polea (21ª) fija primaria de una manera desplazable en una dirección axial del eje (21d) de entrada y que forma una primera ranura (21c) de correa con la media polea (21a) fija primaria; una polea (22) secundaria que incluye una media polea (22a) fija secundaria fijada en relación con el eje (22d) de salida, y una media polea (22b) móvil secundaria opuesta a la media polea (22a) fija secundaria de una manera desplazable en una dirección axial del eje (22d) de salida y que forma una segunda ranura (22c) de correa con la media polea (22a) fija secundaria; y un enrollamiento (23) de correa sobre la primera ranura (21c) de correa y la segunda ranura (22c) de correa, en la que el accionador (30) está adaptado para desplazar la media polea (21b) móvil primaria o la media polea (22b) móvil secundaria.
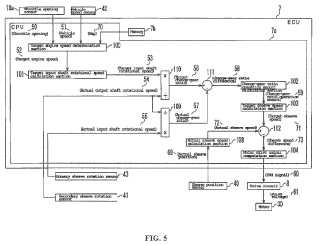
5. La transmisión (20) de acuerdo con la reivindicación 2, en la que la unidad (9) de control comprende:
una unidad (7a) de cálculo para calcular una cantidad de funcionamiento de la relación de cambio de velocidad en base a la diferencia entre la relación de cambio de velocidad real y la relación de cambio de velocidad objetivo con el fin de reducir la diferencia entre la relación de cambio de velocidad real y la relación de cambio de velocidad objetivo, y para emitir una señal de control de acuerdo con la cantidad de funcionamiento calculada de la relación de cambio de velocidad; y una unidad (8) motriz para suministrar energía eléctrica al accionador (30) de acuerdo con la señal de control.
6. La transmisión (20) de acuerdo con la reivindicación 5, en la que la unidad (7a) de cálculo está adaptada para calcular la cantidad de funcionamiento de la relación de cambio de velocidad obteniendo una cantidad de funcionamiento de la velocidad de rotación del eje (21d) de entrada en base a una diferencia entre la velocidad de rotación del eje (21d) de entrada y una velocidad de rotación objetivo del eje (21d) de entrada con el fin de reducir la diferencia entre la relación de cambio de velocidad real y la relación de cambio de velocidad objetivo, y dividiendo la cantidad de funcionamiento calculada de la velocidad de rotación del eje (21d) de entrada por la velocidad de rotación del eje (22d) de salida.
7. La transmisión (20) de acuerdo con la reivindicación 4, que comprende además un sensor (43) de velocidad de rotación del eje de entrada para detectar una velocidad de rotación del eje (21d) de entrada y emitir la velocidad de rotación del eje (21d) de entrada a la unidad (9) de control, en la que la unidad (9) de control comprende:
una unidad (7a) de cálculo para calcular una cantidad de funcionamiento de una posición de polea en base a una diferencia entre una posición de polea real de una cualquiera de entre la media polea (21b) móvil primaria y la media polea (22b) móvil secundaria, que se calcula en base a la relación de cambio de velocidad real obtenida dividiendo la velocidad de rotación del eje (21d) de entrada por la velocidad de rotación del eje (22d)
de salida, y una posición de polea objetivo de una cualquiera de entre la media polea (21b) móvil primaria y la media polea (22b) móvil secundaria, que se calcula en base a la relación de cambio de velocidad objetivo, con el fin de reducir la diferencia entre la relación de cambio de velocidad real y la relación de cambio de velocidad objetivo, y para emitir una señal de control de acuerdo con la cantidad de funcionamiento calculada de la posición de polea; y
una unidad (8) motriz para suministrar energía eléctrica al accionador (30) de acuerdo con la señal de control.
8. La transmisión (20) de acuerdo con la reivindicación 4, en la que la unidad (9) de control está adaptada para calcular una posición de polea objetivo de una cualquiera de entre la media polea (21b) móvil primaria y la media polea (22b) móvil secundaria en base a la relación de cambio de velocidad objetivo, y controlar el accionador (30) de tal manera que la posición de polea de una cualquiera de entre la media polea (21b) móvil primaria y la media polea (22b) móvil secundaria alcance la posición de polea objetivo.
9. Una unidad (2) de potencia que comprende una transmisión (20) de variación continua controlada electrónicamente de acuerdo con cualquier reivindicación anterior.
10. Un vehículo (1) que comprende una rueda (3) trasera o rueda motriz y una unidad (2) de potencia que tiene una fuente (10) motriz y una transmisión (20) de variación continua controlada electrónicamente, en el que la transmisión
(20) de variación continua controlada electrónicamente comprende:
un mecanismo (20a) de cambio de velocidad que tiene un eje (21d) de entrada conectado a la fuente (10) motriz, un eje (22d) de salida, y un accionador (30) para cambiar una relación de cambio de velocidad entre el eje (21d) de entrada y el eje (22d) de salida; una unidad (9) de control para controlar el accionador (30) ; un sensor (41) de velocidad de rotación del eje de salida para detectar una velocidad de rotación del eje (22d) de salida y emitir la velocidad de rotación del eje (22d) de salida a la unidad (9) de control; y un embrague (25) centrífugo conectado al eje (22d) de salida, estando el embrague (25) centrífugo configurado para transmitir la rotación del eje (22d) de salida a la rueda (3) motriz o rueda trasera; en el que la unidad (9) de control está adaptada para controlar el accionador (30) de acuerdo con una relación de cambio de velocidad objetivo obtenida dividiendo una velocidad de rotación objetivo del eje (21d) de entrada por la velocidad de rotación del eje (22d) de salida, de tal manera que la relación de cambio de velocidad objetivo varía con el deterioro del embrague (25) centrífugo.
11. El vehículo (1) de acuerdo con la reivindicación 10, que comprende además:
un sensor (18a) de abertura del estrangulador para detectar una abertura del estrangulador; y un sensor (42) de velocidad del vehículo para detectar una velocidad del vehículo, en el que la unidad (9) de control determina la velocidad de rotación objetivo del eje (21d) de entrada en base a la abertura del estrangulador y la velocidad del vehículo.
12. Un controlador para una transmisión (20) de variación continua controlada electrónicamente que comprende:
un mecanismo (20a) de cambio de velocidad que tiene un eje (21d) de entrada, un eje (22d) de salida, y un accionador (30) para cambiar una relación de cambio de velocidad entre el eje (21d) de entrada y el eje (22d) de salida; una unidad (9) de control para controlar el accionador (30) ; un sensor (41) de velocidad de rotación del eje de salida para detectar una velocidad de rotación del eje (22d) de salida; y un embrague (25) centrífugo conectado a un eje (22d) de salida, estando el embrague (25) centrífugo configurado para transmitir la rotación del eje (22d) de salida a una rueda (3) motriz o rueda trasera; en el que el accionador (30) se controla de acuerdo con una relación de cambio de velocidad objetivo obtenida dividiendo una velocidad de rotación objetivo del eje (21d) de entrada por la velocidad de rotación del eje (22d) de salida, de tal manera que la relación de cambio de velocidad objetivo varía con el deterioro del embrague
(25) centrífugo.
13. Un procedimiento para controlar una transmisión (20) de variación continua controlada electrónicamente que tiene:
un mecanismo (20a) de cambio de velocidad que tiene un eje (21d) de entrada, un eje (22d) de salida, y un accionador (30) para cambiar una relación de cambio de velocidad entre el eje (21d) de entrada y el eje (22d) de salida; una unidad (9) de control para controlar el accionador (30) ; y un sensor (41) de velocidad de rotación del eje de salida para detectar una velocidad de rotación del eje (22d) de salida, y un embrague (25) centrífugo conectado al eje (22d) de salida, estando el embrague (25) centrífugo configurado para transmitir la rotación del eje (22d) de salida a una rueda (3) motriz o rueda trasera; en el que el procedimiento comprende las etapas de: determinar una relación de cambio de velocidad objetivo obtenida dividiendo una velocidad de rotación objetivo del eje (21d) de entrada por la velocidad de rotación del eje (22d) de salida; y controlar el accionador (30) de acuerdo con la relación de cambio de velocidad determinada de tal manera que la relación de cambio de velocidad objetivo varía con el deterioro del embrague (25) centrífugo.
Patentes similares o relacionadas:
Transmisión CVT neumáticamente ajustable y procedimiento para el ajuste de una transmisión CVT, del 11 de Diciembre de 2019, de ROBERT BOSCH GMBH: Procedimiento para el control de un actuador neumático de una transmisión CVT para el cambio de una transmisión de la transmisión CVT, […]
Sistema de transmisión con dispositivo para regular la curva de cambio de marchas, del 1 de Mayo de 2019, de PIAGGIO & C. S.P.A.: Sistema de transmisión continuamente variable para un ciclo de motor, que comprende una primera roldana de accionamiento accionada por un semieje […]
Transmisión CVT con capacidad de control mejorada y procedimiento de regulación para la misma, del 1 de Mayo de 2019, de ROBERT BOSCH GMBH: Transmisión CVT que comprende: - un primer par de discos cónicos con un primer disco cónico fijo y un disco cónico axialmente móvil; - un elemento […]
Mecanismo de velocidad variable del tipo de correa en V, del 11 de Abril de 2018, de YAMAHA HATSUDOKI KABUSHIKI KAISHA: Una transmisión de variación continua de correa en V , en la que una polea de accionamiento de un tipo de diámetro de enrollamiento variable […]
Transmisión variable por correa trapezoidal y cilindros hidráulicos gemelos, del 28 de Noviembre de 2017, de QUINTILLAN FARIÑA, Rubén: Transmisión variable por correa trapezoidal y cilindros hidráulicos gemelos. Transmisión que permite variar la relación de giro entre un eje primario y un eje secundario […]
Transmisión de variación continua del tipo de correa, que tiene un dispositivo para la determinación de anomalías, del 7 de Junio de 2017, de SUZUKI MOTOR CORPORATION: Transmisión de variación continua del tipo de correa que tiene un dispositivo para la determinación de anomalías, comprendiendo la transmisión de variación continua […]
Transmisión de variación continua de correa en V, del 1 de Junio de 2016, de HONDA MOTOR CO., LTD.: Una transmisión de variación continua de correa en V incluyendo: una polea fija fijada a un eje de accionamiento ; una polea móvil que se puede aproximar […]
 Transmisión de variación continua de correa en V, del 17 de Febrero de 2016, de Musashi Seimitsu Industry Co., Ltd: Una transmisión de variación continua de correa en V incluyendo
un elemento de roldana fijo montado fijamente en un eje de polea ,
[…]
Transmisión de variación continua de correa en V, del 17 de Febrero de 2016, de Musashi Seimitsu Industry Co., Ltd: Una transmisión de variación continua de correa en V incluyendo
un elemento de roldana fijo montado fijamente en un eje de polea ,
[…]