TRACTOR ROBOTIZADO ALIMENTADO POR ENERGÍA SOLAR.
1. Tractor robotizado alimentado por energía solar, del tipo de los que comprenden un chasis articulado,
portador de aperos o dispositivos para la realización de labores agrícolas, y compuesto por un bastidor trasero provisto de al menos una rueda de apoyo y un bastidor delantero provisto de unas ruedas motrices; caracterizado porque comprende:- una unidad central de control telemático en base a un sistema informático asistido por un sistema de posicionamiento global (GPS) para el guiado y desplazamiento autónomo del tractor;- un sistema de alimentación por energía solar conectado a la unidad de control y que comprende unas placas fotovoltaicas montadas sobre el tractor;- un sistema de tracción que comprende un motor eléctrico para el accionamiento, a baja velocidad y por medio de un reductor, del eje de las ruedas motrices, siendo dicho motor eléctrico alimentado por un variador de frecuencia conectado al sistema de alimentación y asociado a un analizador de corriente para el suministro a dicho motor eléctrico de una potencia variable acorde con la potencia suministrada por las placas fotovoltaicas,- un sistema de dirección que comprende un motor eléctrico alimentado a través de un variador de frecuencia para el accionamiento del eje de articulación del bastidor.2. Tractor robotizado, según la reivindicación 1, caracterizado porque las placas fotovoltaicas se encuentran montadas sobre el tractor por medio de, al menos, un soporte orientable o seguidor solar.3. Tractor robotizado, según cualquiera de las reivindicaciones anteriores, caracterizado porque el sistema de alimentación comprende unas baterías recargables de alimentación de apoyo.4. Tractor robotizado, según cualquiera de las reivindicaciones anteriores, caracterizado porque las ruedas motrices están conformadas por unas llantas metálicas, sin cubiertas o neumáticos.5. Tractor, según cualquiera de las reivindicaciones anteriores, caracterizado porque el bastidor trasero dispone lateralmente de unos patines estabilizadores.6. Tractor, según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende, asociados a la unidad de control, unos medios para la transmisión de información sobre el funcionamiento del tractor.7. Tractor, según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende al menos una cámara para la captación de imágenes del entorno, encontrándose dicha cámara conectada a la unidad de control.8. Tractor, según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende unos sensores, conectados a la unidad de control, para la captación de parámetros ambientales y/o parámetros de la tierra a trabajar
Tipo: Modelo de Utilidad. Resumen de patente/invención. Número de Solicitud: U201031254.
Solicitante: BOVER TROBAT, DAMIAN.
Nacionalidad solicitante: España.
Provincia: ILLES BALEARS.
Inventor/es: BOVER TROBAT,DAMIAN.
Fecha de Solicitud: 14 de Diciembre de 2010.
Fecha de Publicación: .
Fecha de Concesión: 6 de Junio de 2011.
Clasificación PCT:
- A01B35/10 NECESIDADES CORRIENTES DE LA VIDA. › A01 AGRICULTURA; SILVICULTURA; CRIA; CAZA; CAPTURA; PESCA. › A01B TRABAJO DE LA TIERRA EN AGRICULTURA O EN SILVICULTURA; PARTES CONSTITUTIVAS O ACCESORIOS DE MAQUINAS O INSTRUMENTOS AGRICOLAS, EN GENERAL (apertura o recubrimiento de surcos o de hoyos para la siembra, plantación o abonado A01C 5/00; máquinas para la recogida de raíces o tubérculos A01D; segadoras convertibles en aparatos para trabajo de la tierra o capaces de trabajar la tierra A01D 42/04; segadoras combinadas con instrumentos para trabajo de la tierra A01D 43/12; trabajo de la tierra para obras públicas o explotaciones mineras E01, E02, E21). › A01B 35/00 Otras máquinas para el trabajo de la tierra (A01B 37/00, A01B 39/00, A01B 77/00 tienen prioridad). › montados sobre tractores.
Fragmento de la descripción:
Tractor robotizado alimentado por energía solar.
Objeto de la invención
La presente invención se refiere como su título indica a un tractor robotizado alimentado por energía solar, que presenta unas particularidades constructivas orientadas a permitir el desplazamiento del tractor a una velocidad muy baja mediante un sistema de tracción que es alimentado eléctricamente a medida que unas placas fotovoltaicas montadas sobre el mismo van generando energía eléctrica; disponiendo este tractor robotizado de una unidad central de control telemático en base a un sistema informático asistido por un sistema de posicionamiento global (GPS) que permite el guiado y desplazamiento autónomo del tractor, es decir, sin conductor.
Campo de la invención
El tractor robotizado objeto de la invención tiene su aplicación principal en trabajos de agricultura y especialmente de cultivo y roturado de la tierra.
Antecedentes de la invención
A lo largo del tiempo se han venido utilizando diferentes medios para realizar trabajos agrícolas, tales como la eliminación de hierbas o el roturado de la tierra.
Inicialmente estos trabajos se realizaban mediante herramientas manuales, posteriormente mediante aperos de tracción animal y actualmente con tractores movidos con motores diésel que pueden alcanzar hasta 400 CV de potencia. Actualmente el progreso en la realización de trabajos agrícolas se centra en el aumento de la potencia de los tractores utilizados, con el fin de realizar cada vez más trabajo en menos tiempo, aumentando la productividad; sin embargo estos tractores se utilizan de forma intensiva en periodos más o menos limitados de tiempo, permaneciendo inoperantes el tiempo restante.
Estos tractores provistos de motores diésel no constituyen actualmente una solución idónea desde un punto de vista ecológico y medioambiental, ya que liberan a la atmósfera grandes cantidades de CO2, consumen combustibles fósiles cuyos recursos son limitados, y requieren la atención continuada de un conductor u operario para su manejo, lo que encarece el coste final de los productos cultivados.
Una solución idónea para resolver al menos parcialmente los problemas de los tractores actuales sería el desarrollo de tractores alimentados mediante energía solar o directamente con electricidad; sin embargo los desarrollos realizados en estos tipos de alimentación solar o eléctrica no son aplicables a los tractores existentes, ya que en el primer caso requerirían la utilización de un número desproporcionado de placas fotovoltaicas para realizar la recarga de las baterías y, en el caso de la alimentación eléctrica, además de alcanzar una autonomía muy limitada, sería preciso instalar en los campos de cultivo tomas de corriente para la recarga de las baterías del vehículo, lo que resulta inviable tanto por el coste de la instalación como la utilización de un tiempo importante en la recarga de baterías.
Descripción de la invención
El tractor robotizado alimentado por energía solar, objeto de esta invención, presenta una serie de particularidades constructivas orientadas de una parte a permitir su alimentación mediante placas solares fotovoltaicas sin utilizar baterías para la acumulación de la energía eléctrica suministrada por las placas fotovoltaicas y su posterior consumo por parte del sistema de tracción del tractor.
Otro de los objetivos de la invención es dotar al tractor de unos medios para su guiado y desplazamiento autónomos, es decir sin la presencia física de un conductor.
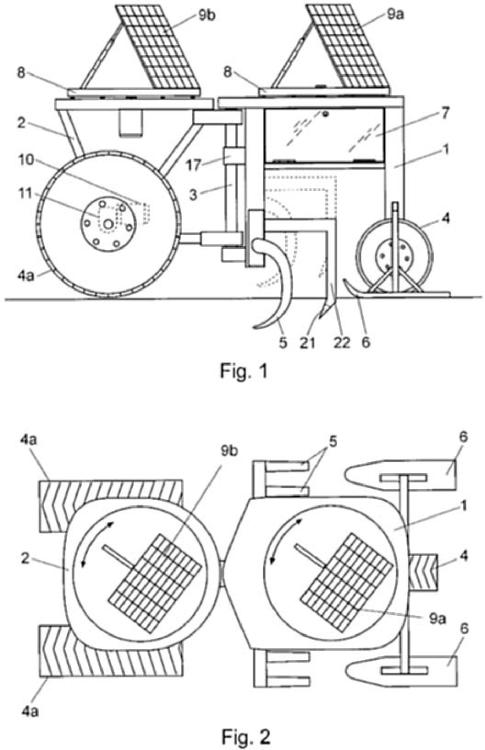
El tractor robotizado objeto de esta invención es del tipo de los que comprenden un chasis articulado portador de aperos o dispositivos para la realización de labores agrícolas, estando compuesto dicho chasis articulado por un bastidor trasero provisto de al menos una rueda de apoyo y un bastidor delantero provisto de unas ruedas motrices.
El cambio de dirección del tractor se consigue mediante el giro relativo de los dos chasis hacia uno u otro lateral, de forma que se dispongan alineados para desplazarse en recto, o que formen entre sí un ángulo menor de 180º en el lateral hacia el cual va a girar.
De acuerdo con la invención este tractor robotizado comprende:
- una unidad central de control telemático en base a un sistema informático asistido por un sistema de posicionamiento global (GPS) para de guiado y desplazamiento autónomo del tractor;
- un sistema de alimentación por energía solar conectado a la unidad de control y que comprende unas placas fotovoltaicas montadas sobre el tractor;
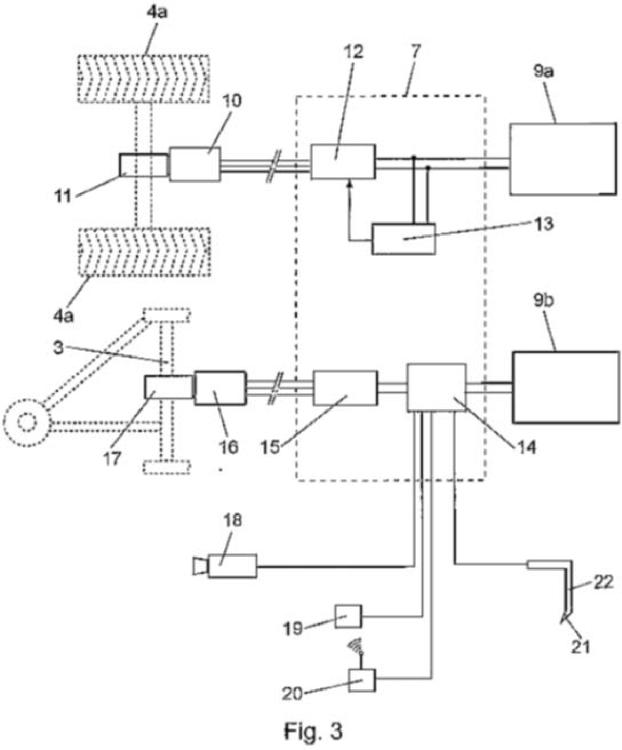
- un sistema de tracción que comprende un motor eléctrico para el accionamiento, a baja velocidad y por medio de un reductor, del eje de las ruedas motrices, siendo dicho motor eléctrico alimentado por un variador de frecuencia conectado al sistema de alimentación y asociado a un analizador de corriente para el suministro a dicho motor eléctrico de una potencia variable acorde con la potencia suministrada por las placas fotovoltaicas,
- un sistema de dirección que comprende un motor eléctrico alimentado a través de un variador de frecuencia para el accionamiento del eje de articulación del bastidor.
La unidad central de control es la encargada de controlar el funcionamiento autónomo del tractor y de detectar cualquier incidencia o fallo de funcionamiento del mismo.
El sistema de tracción mencionado anteriormente es alimentado directamente por la energía eléctrica generada por las placas fotovoltaicas, siendo el organizador de corriente el encargado de garantizar que el variador de frecuencia suministre al motor eléctrico del sistema de tracción una potencia variable y acorde con la potencia suministrada por las placas fotovoltaicas habiéndose previsto que la velocidad del desplazamiento del tractor sea del orden de un metro por minuto, es decir, muy inferior a la de los tractores impulsados por motores diésel.
De este modo el tractor puede realizar trabajos agrícolas de forma autónoma, siendo guiado por GPS, durante las horas de insolación.
De acuerdo con la invención y con el fin de obtener el mayor rendimiento posible de las placas fotovoltaicas, estas se encuentran montadas sobre el tractor por medio al menos de un soporte orientable o seguidor solar que la dispone en la posición adecuada para recibir en cada instante la mayor radiación solar posible.
En una realización de la invención el sistema de alimentación comprende unas baterías recargables de alimentación de apoyo y que son las utilizadas para alimentar el sistema de dirección, el seguidor solar y los dispositivos de control del tractor, a excepción del sistema de tracción que como ya se ha comentado anteriormente es alimentado directamente con la corriente generada por las placas fotovoltaicas.
En este sentido cabe mencionar que el tractor puede incorporar dos o más grupos de placas estando una parte de las mismas destinadas a la alimentación del sistema de tracción y las restantes a la alimentación de los dispositivos auxiliares.
En una realización de la invención las ruedas motrices están conformadas por unas llantas metálicas sin cubiertas o neumáticos con el fin de garantizar una correcta tracción del vehículo sobre diferentes terrenos incluso sobre tierra húmeda, y a reducir tanto el peso como el volumen de las mismas.
De acuerdo con la invención el bastidor trasero dispone lateralmente de unos patines estabilizadores cuya finalidad es incrementar la superficie de apoyo del tractor robotizado sobre el terreno e impedir por ejemplo su volcado en terrenos con una cierta inclinación o por efecto del viento lateral.
Al menos en una fase inicial del desarrollo se ha previsto que este tractor tenga unas dimensiones reducidas y que vaya destinado especialmente a las tareas de remover la tierra con el fin de eliminar rastrojos y conseguir un esponjado del suelo.
Sin embargo, no se descarta que pueda realizar otras tareas agrícolas con los aperos o accesorios adecuados.
La unidad de control mencionada anteriormente dispone de unos medios para la transmisión de información sobre el funcionamiento del tractor comunicando posibles averías, incidencias u otros parámetros que puedan influir en su funcionamiento, por ejemplo el grado de humedad de la tierra.
Para ello y de acuerdo con la invención el tractor comprende al menos una cámara conectada...
Reivindicaciones:
1. Tractor robotizado alimentado por energía solar, del tipo de los que comprenden un chasis articulado, portador de aperos o dispositivos para la realización de labores agrícolas, y compuesto por un bastidor trasero provisto de al menos una rueda de apoyo y un bastidor delantero provisto de unas ruedas motrices; caracterizado porque comprende:
- una unidad central de control telemático en base a un sistema informático asistido por un sistema de posicionamiento global (GPS) para el guiado y desplazamiento autónomo del tractor;
- un sistema de alimentación por energía solar conectado a la unidad de control y que comprende unas placas fotovoltaicas montadas sobre el tractor;
- un sistema de tracción que comprende un motor eléctrico para el accionamiento, a baja velocidad y por medio de un reductor, del eje de las ruedas motrices, siendo dicho motor eléctrico alimentado por un variador de frecuencia conectado al sistema de alimentación y asociado a un analizador de corriente para el suministro a dicho motor eléctrico de una potencia variable acorde con la potencia suministrada por las placas fotovoltaicas,
- un sistema de dirección que comprende un motor eléctrico alimentado a través de un variador de frecuencia para el accionamiento del eje de articulación del bastidor.
2. Tractor robotizado, según la reivindicación 1, caracterizado porque las placas fotovoltaicas se encuentran montadas sobre el tractor por medio de, al menos, un soporte orientable o seguidor solar.
3. Tractor robotizado, según cualquiera de las reivindicaciones anteriores, caracterizado porque el sistema de alimentación comprenden unas baterías recargables de alimentación de apoyo.
4. Tractor robotizado, según cualquiera de las reivindicaciones anteriores, caracterizado porque las ruedas motrices están conformadas por unas llantas metálicas, sin cubiertas o neumáticos.
5. Tractor, según cualquiera de las reivindicaciones anteriores, caracterizado porque el bastidor trasero dispone lateralmente de unos patines estabilizadores.
6. Tractor, según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende, asociados a la unidad de control, unos medios para la transmisión de información sobre el funcionamiento del tractor.
7. Tractor, según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende al menos una cámara para la captación de imágenes del entorno, encontrándose dicha cámara conectada a la unidad de control.
8. Tractor, según cualquiera de las reivindicaciones anteriores, caracterizado porque comprende unos sensores, conectados a la unidad de control, para la captación de parámetros ambientales y/o parámetros de la tierra a trabajar.
Patentes similares o relacionadas:
PERFECCIONAMIENTOS EN SUBSOLADORES AGRICOLAS, del 16 de Octubre de 1985, de ZAZURCA LARROYA,JOSE: SUBSOLADOR AGRICOLA CARACTERIZADO PORQUE EL BASTIDOR PORTARREJAS QUEDA EN POSICION OBLICUA Y NO PARALELA AL EJE DE LAS RUEDAS DEL TRACTOR. CONSTA DE UN […]