Sistema y procedimiento para tomografía de coherencia óptica.
Procedimiento para tomografía de coherencia óptica, en el cual con un dispositivo de tomografía de coherencia óptica (10 - 30) se toman una primera imagen (60) en el área de un primer plano (S) de un objeto (1) y una segunda imagen (61) en el área de un segundo plano (F) del objeto (1),
siendo el segundo plano (F) del objeto (1) differente del primer plano (S) del objeto (1),
caracterizado porque
la primera imagen (60) en el área del primer plano (S) del objeto (1) y la segunda imagen (61) en el área del segundo plano (F) del objeto (1) se toman en tiempo real, transcurriendo el primer plano (S) del objeto (1) esencialmente paralelo a una dirección de irradiación, en la que la luz emitida por el dispositivo de tomografía de coherencia óptica (10 - 30) cae sobre el objeto (1), y transcurriendo el segundo plano (F) del objeto (1) esencialmente perpendicular a la dirección de irradiación, y
se selecciona, dependiendo de un comando de control, en particular introducido por una persona operadora, si la primera imagen (60) o la segunda imagen (61) se reproduce como imagen en tiempo real y la otra imagen respectiva, es decir, la segunda o primera imagen (respectivamente 61 y 60) ya tomada anteriormente en tiempo real, como imagen fija simultáneamente en un dispositivo de visualización (52).
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11002895.
Solicitante: Agfa HealthCare N.V.
Nacionalidad solicitante: Bélgica.
Dirección: SEPTESTRAAT 27 2640 MORTSEL BELGICA.
Inventor/es: NEBOSIS,RAINER, WELLENS,GEERT, SCHORRE,WOLFGANG.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- A61B5/00 NECESIDADES CORRIENTES DE LA VIDA. › A61 CIENCIAS MEDICAS O VETERINARIAS; HIGIENE. › A61B DIAGNOSTICO; CIRUGIA; IDENTIFICACION (análisis de material biológico G01N, p.ej. G01N 33/48). › Medidas encaminadas a establecer un diagnóstico (diagnóstico por medio de radiaciones A61B 6/00; diagnóstico por ondas ultrasónicas, sónicas o infrasónicas A61B 8/00 ); Identificación de individuos.
- G01B9/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01B MEDIDA DE LA LONGITUD, ESPESOR O DIMENSIONES LINEALES ANALOGAS; MEDIDA DE ANGULOS; MEDIDA DE AREAS; MEDIDA DE IRREGULARIDADES DE SUPERFICIES O CONTORNOS. › G01B 9/00 Instrumentos según se especifica en los subgrupos y caracterizados por la utilización de medios de medida ópticos (disposiciones para la medida de parámetros particulares G01B 11/00). › Interferómetros.
- G01N21/47 G01 […] › G01N INVESTIGACION O ANALISIS DE MATERIALES POR DETERMINACION DE SUS PROPIEDADES QUIMICAS O FISICAS (procedimientos de medida, de investigación o de análisis diferentes de los ensayos inmunológicos, en los que intervienen enzimas o microorganismos C12M, C12Q). › G01N 21/00 Investigación o análisis de los materiales por la utilización de medios ópticos, es decir, utilizando rayos infrarrojos, visibles o ultravioletas (G01N 3/00 - G01N 19/00 tienen prioridad). › Dispersión, es decir, reflexión difusa (G01N 21/25, G01N 21/41 tienen prioridad).
PDF original: ES-2527004_T3.pdf



Fragmento de la descripción:
Sistema y procedimiento para tomografía de coherencia óptica
Esta solicitud de patente hace referencia a un procedimiento y su correspondiente sistema para tomografía de coherencia óptica.
La tomografía de coherencia óptica (OCT) es un método para medir el interior de muestras que dispersan la luz. El tejido biológico, debido a sus propiedades de dispersión de la luz, es especialmente apropiado para la exploración diagnóstica mediante OCT. Dado que para la OCT son suficientes intensidades de luz relativamente bajas y las longitudes de luz de los haces empleados se encuentran en su mayoría en el rango infrarrojo cercano (750 nm hasta 1350 nm), no representa una carga de radicación para el tejido biológico, al contrario que el radiodiagnóstico ionizante. Por tanto, es especialmente significativa para la medicina y comparable a grandes rasgos con el diagnóstico ecográfico, solo que en lugar de sonido en la OCT se emplea luz. El tiempo de retardo de la luz reflejada en diversas capas límite de la muestra se capta con ayuda de un interferómetro. Con la OCT suelen alcanzarse resoluciones superiores en una a dos órdenes de magnitud a las de la ecografía, pero la profundidad de medición alcanzable es notablemente inferior. Las imágenes seccionales obtenidas, debido a la dispersión óptica, normalmente solo llegan a una profundidad de unos pocos milímetros en el tejido. Los ámbitos de aplicación de la OCT más importantes en la actualidad pertenecen a la oftalmología, la dermatología y el diagnóstico oncológico. No obstante, también existen algunas aplicaciones no médicas, como p.ej. en las pruebas de materiales.
Particularmente en las aplicaciones médicas de la OCT, los procedimientos y sistemas tienen requisitos especiales para garantizar una exploración fiable y que ahorra tiempo con una manipulación sencilla.
Por el documento US 2010/0042084 A1 se conoce el captar varias imágenes de sección transversal OCT de un vaso sanguíneo y luego presentar en una pantalla una de las imágenes de sección transversal captadas junto con una imagen de sección longitudinal obtenida a partir de las imágenes de sección transversal captadas o imagen tridimensional del vaso. Mediante el desplazamiento de líneas de referencia marcadas en la imagen de sección transversal o imagen de sección longitudinal, se representa de nuevo en la pantalla la imagen de sección transversal o imagen de sección longitudinal, cuya posición se corresponde con la posición de la línea de referencia desplazada.
Por el documento WO 2011/007657 A1 se conoce el tomar, mediante OCT, varios tomogramas de un ojo y a continuación seleccionar, de entre los varios tomogramas tomados, un primer tomograma y un segundo tomograma en relación con el primero, y presentarlo en una visualización.
Un objeto de la presente invención es proporcionar un procedimiento y su correspondiente sistema para tomografía de coherencia óptica que posibilite una exploración fiable de un objeto que ahorre tiempo con una manipulación lo más sencilla posible.
Este objeto se logra mediante el procedimiento y el sistema según las reivindicaciones independientes.
En el procedimiento según la presente invención, se toman en tiempo real, mediante un dispositivo de tomografía de coherencia óptica, una primera imagen en el área de un primer plano de un objeto y una segunda imagen en el área de un segundo plano del objeto, siendo el segundo plano del objeto differente del primer plano del objeto. Además se reproducen, dependiendo de un comando de control, en particular introducido por una persona operadora, la primera imagen o la segunda imagen como imagen en tiempo real y la otra imagen respectiva, es decir, la segunda o primera imagen, como imagen fija simultáneamente en un dispositivo de visualización.
El sistema según la presente invención comprende un dispositivo de tomografía de coherencia óptica para la toma de una primera imagen en el área de un primer plano de un objeto y de una segunda imagen en el área de un segundo plano del objeto, siendo el segundo plano del objeto differente del primer plano del objeto, y un dispositivo de visualización para reproducir la primera imagen y la segunda imagen y se caracteriza por un dispositivo de control para controlar el dispositivo de tomografía de coherencia óptica de tal manera que la primera imagen en el área del primer plano del objeto y la segunda imagen en el área del segundo plano del objeto se toman en tiempo real, y para controlar el sistema de tal manera que se reproducen, mediante un comando de control que puede introducirse en particular por un operador, la primera imagen o la segunda imagen como imagen en tiempo real y la otra imagen respectiva, es decir la primera imagen o la segunda imagen, como imagen fija simultáneamente en el dispositivo de visualización.
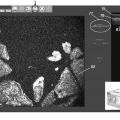
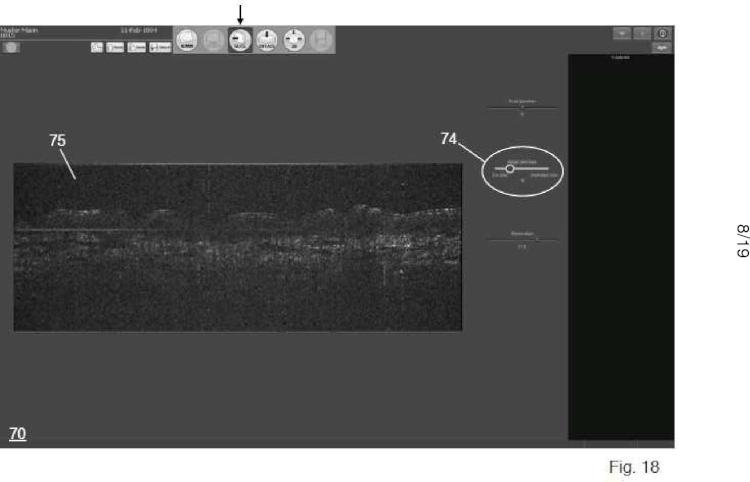
La invención se basa en la idea de, mediante un comando de control introducido por una persona operadora, elegir entre al menos dos modos operativos diferentes del dispositivo de tomografía de coherencia óptica, en particular entre un llamado modo slice y un llamado modo en-face, tomando en el modo operativo seleccionado respectivamente, p.ej. el modo en-face, una imagen de un plano del objeto en tiempo real, y reproduciéndola en un dispositivo de visualización en tiempo real, y simultáneamente reproduciendo en el dispositivo de visualización como imagen fija otra imagen ya tomada anteriormente en tiempo real de otro plano del objeto en el otro modo operativo, p.ej. el modo slice, y almacena temporalmente o permanentemente. Según el comando de control dado por la persona operadora, el sistema puede operarse en un modo en-face, en el cual se reproduce en el dispositivo de visualización una imagen en-face de un plano
del objeto en tiempo real junto a una Imagen slice de un plano del objeto perpendicular al otro como imagen fija. De manera alternativa, puede operarse el sistema en un modo slice, en el que una Imagen slice de un plano del objeto se representa como Imagen en tiempo real junto con una imagen en-face de un plano del objeto perpendicular al otro como Imagen fija. La persona operadora, en particular el médico que diagnostica, recibe de esta manera constantemente en ambos modos operativos una gran cantidad de Información relevante y de gran valor Informativo para el diagnóstico.
En conjunto, con ello se posibilita una exploración de un objeto fiable y que ahorra tiempo con una manipulación sencilla al mismo tiempo.
El objeto a explorar es preferiblemente tejido biológico, en particular una estructura cutánea de una persona o animal. La invención, no obstante, puede usarse en principio también para la exploración de otros órganos humanos o animales.
Según la presente invención, el primer plano del objeto transcurre esencialmente paralelo a una dirección de irradiación, en la que la luz emitida por el dispositivo de tomografía de coherencia óptica cae sobre el objeto. Además, el segundo plano del objeto transcurre esencialmente perpendicular a una dirección de irradiación, en la que la luz emitida por el dispositivo de tomografía de coherencia óptica cae sobre el objeto. Con ello, las imágenes tomadas y representadas tienen un especial valor informativo.
Asimismo es preferible que la imagen primera o segunda tomada en tiempo real se tome con una tasa de grabación de al menos una imagen por segundo, preferiblemente al menos cinco imágenes por segundo. De manera alternativa o adicional, la imagen primera o segunda reproducida en el dispositivo de visualización como imagen en tiempo real se reproduce con una tasa de repetición de al menos una imagen por segundo, preferiblemente al menos cinco imágenes por segundo. Esto significa que la toma o reproducción de una imagen en tiempo real en el sentido de la inversión se realiza preferiblemente con una tasa de grabación o tasa de repetición de al menos una imagen por segundo. Con ello se garantiza que la imagen tomada y reproducida de un plano del objeto en tiempo real en el modo operativo elegido se tome y reproduzca con una tasa lo suficientemente alta para poder reconocer de manera fiable alteraciones temporales relevantes para el diagnóstico.
En otra realización preferible de la presente invención, está previsto que tras un cambio, activado por un comando de control, de la reproducción de la primera o segunda imagen como imagen en tiempo real a una reproducción de la primera o segunda imagen como imagen fija y de la segunda o primera imagen como imagen en tiempo real, se actualice la primera o segunda imagen reproducida como imagen fija, una vez haya pasado un periodo predefinido desde el cambio, en particular al menos diez segundos. Con ello se garantiza que la primera o segunda imagen reproducida... [Seguir leyendo]
Reivindicaciones:
1. Procedimiento para tomografía de coherencia óptica, en el cual con un dispositivo de tomografía de coherencia óptica (10 - 30) se toman una primera imagen (60) en el área de un primer plano (S) de un objeto (1) y una segunda imagen (61) en el área de un segundo plano (F) del objeto (1), siendo el segundo plano (F) del objeto (1) differente del primer plano (S) del objeto (1),
caracterizado porque
la primera imagen (60) en el área del primer plano (S) del objeto (1) y la segunda Imagen (61) en el área del segundo plano (F) del objeto (1) se toman en tiempo real, transcurriendo el primer plano (S) del objeto (1) esencialmente paralelo a una dirección de irradiación, en la que la luz emitida por el dispositivo de tomografía de coherencia óptica (10 - 30) cae sobre el objeto (1), y transcurriendo el segundo plano (F) del objeto (1) esencialmente perpendicular a la dirección de irradiación, y
se selecciona, dependiendo de un comando de control, en particular Introducido por una persona operadora, si la primera imagen (60) o la segunda imagen (61) se reproduce como Imagen en tiempo real y la otra imagen respectiva, es decir, la segunda o primera imagen (respectivamente 61 y 60) ya tomada anteriormente en tiempo real, como imagen fija simultáneamente en un dispositivo de visualización (52).
2. Procedimiento según la reivindicación 1, en el que la primera y/o segunda Imagen (respectivamente 60 y 61) se toma con una tasa de grabación de al menos una Imagen por segundo, preferiblemente cinco imágenes por segundo.
3. Procedimiento según una de las reivindicaciones anteriores, en el que la primera o segunda imagen (respectivamente 60 y 61) reproducida como imagen en tiempo real en el dispositivo de visualización (52) se reproduce con una tasa de repetición de al menos una imagen por segundo, preferiblemente al menos cinco imágenes por segundo.
4. Procedimiento según una de las reivindicaciones anteriores, en el que tras un cambio, activado por un comando de control, de la reproducción de la primera o segunda Imagen (respectivamente 60 y 61) como imagen en tiempo real a una reproducción de la primera o segunda Imagen (respectivamente 60 y 61) como imagen fija y de la segunda o primera imagen (respectivamente 61 y 60) como imagen en tiempo real, se actualiza la primera o segunda Imagen (respectivamente 60 y 61) reproducida como imagen fija, una vez haya pasado un periodo predefinido desde el cambio, en particular al menos diez segundos.
5. Procedimiento según una de las reivindicaciones anteriores, en el que la primera imagen (60) se toma en un primer modo operativo en el que la luz reflejada o retrodlspersada por el objeto (1) solo es captada por una superficie parcial (A2) de un detector de resolución espacial (30) del dispositivo de tomografía de coherencia óptica (10 - 30), mientras la distancia óptica de un reflector (16) a un divisor de haz (11) del dispositivo de tomografía de coherencia óptica (10 - 30) se modifica en una vía óptica que es sustancialmente mayor, particularmente al menos 100 veces mayor, que la longitud de onda media (Ao) de la luz acoplada en el dispositivo de tomografía de coherencia óptica (10-30).
6. Procedimiento según una de las reivindicaciones anteriores, en el que la segunda imagen (61) se toma en un segundo modo operativo, en el que, durante una modificación de la distancia óptica de un reflector (16) a un divisor de haz (11) del dispositivo de tomografía de coherencia óptica (10 - 30), la luz reflejada por el objeto (1) es captada por elementos detectores (31) de un detector (30) varias veces, en particular cinco veces como máximo, donde la modificación de la distancia óptica del reflector (16) al divisor de haz (11) es como máximo diez veces mayor que la longitud de onda media (Ao) de la luz acoplada en el dispositivo de tomografía de coherencia óptica (10 - 30).
7. Procedimiento según la reivindicación 6, en el que el segundo plano (F) del objeto (1) transcurre a una determinada profundidad (T) en el objeto (1) y la profundidad (T) en el objeto (1) se ajuste mediante la distancia del reflector (16) al divisor de haz (11), modificándose la distancia óptica del reflector (16) al divisor de haz (11) del dispositivo de tomografía de coherencia óptica (10 - 30) en una vía óptica que es sustancialmente mayor, particularmente al menos 100 veces mayor, que la longitud de onda media (ko) de la luz acoplada en el dispositivo de tomografía de coherencia óptica (10 - 30).
8. Procedimiento según una de las reivindicaciones anteriores, en el que la toma de la primera y/o segunda imagen (respectivamente 60 y 61) mediante el dispositivo de tomografía de coherencia óptica (10 - 30) se inicie automáticamente cuando un cabezal de medición (57), en el que está contenida al menos una parte del dispositivo de tomografía de coherencia óptica (10 - 30), se retira de una posición definida, en particular una posición de reposo.
9. Procedimiento según una de las reivindicaciones anteriores, en el que la conmutación a un modo de visualización
de imagen se realiza automáticamente cuando un cabezal de medición (57), en el que está contenida al menos una parte del dispositivo de tomografía de coherencia óptica (10 - 30), se coloque en una posición definida, en particular una posición de reposo, reproduciéndose en el modo de visualización de imágenes todas las imágenes (60, 61) representadas en el dispositivo de visualización (52) como imágenes fijas.
10. Procedimiento según una de las reivindicaciones anteriores, en el que la toma de la primera y/o segunda imagen (respectivamente 60 y 61) se realiza teniendo en cuenta al menos un parámetro, que se muestra en el dispositivo de visualización (52) y/o se puede seleccionar y/o modificar por parte de una persona operadora, donde el al menos un parámetro se refiere a una propiedad, en particular el contenido de humedad, del objeto (1) a explorar, en particular de la piel humana o animal.
11. Procedimiento según una de las reivindicaciones anteriores, en el que en la toma de la primera y/o segunda imagen (respectivamente 60 y 61) se capta la luz reflejada o retrodispersada en una profundidad (T) determinada del objeto (1), ajustando durante la captación de la luz las propiedades de imagen de un objetivo de muestreo (14a) alojado en un brazo de muestreo (14) del dispositivo de tomografía de coherencia óptica (10 - 30) de manera que el punto focal del objetivo de muestreo (14a) esté en el área de la profundidad (T) correspondiente en el objeto (1).
12. Procedimiento según la reivindicación 10 y 11, en el que las propiedades de imagen del objetivo de muestreo (14a) alojado en el brazo de muestreo (14) del dispositivo de tomografía de coherencia óptica (10 - 30) se ajustan dependiendo del al menos un parámetro.
13. Procedimiento según la reivindicación 12, en el que la relación de la velocidad de movimiento de una o varias lentes del objetivo de muestreo (14a) en dirección al objeto (1) con la velocidad de movimiento de un espejo de referencia (16) del dispositivo de tomografía de coherencia óptica (10 - 30) se ajusta dependiendo del al menos un parámetro.
14. Sistema (50) para tomografía de coherencia óptica con un dispositivo de tomografía de coherencia óptica (10 - 30) configurado para tomar una primera imagen (60) en el área de un primer plano (S) de un objeto (1) y una segunda imagen (61) en el área de un segundo plano (F) del objeto (1), siendo el segundo plano (F) del objeto (1) differente del primer plano (S) del objeto (1), y con un dispositivo de visualización (52) para reproducir las primera y segunda imágenes (60, 61),
caracterizado por
un dispositivo de control para controlar el dispositivo de tomografía de coherencia óptica (10 - 30) de tal manera que la primera imagen (60) en el área del primer plano (S) del objeto (1) y la segunda imagen (61) en el área del segundo plano (F) del objeto (1) se toman en tiempo real, transcurriendo el primer plano (S) del objeto (1) esencialmente paralelo a una dirección de irradiación, en la que la luz emitida por el dispositivo de tomografía de coherencia óptica (10 - 30) cae sobre el objeto (1), y transcurriendo el segundo plano (F) del objeto (1) esencialmente perpendicular a la dirección de irradiación, y para controlar el sistema (50) de tal manera que puede seleccionarse, mediante un comando de control que puede introducirse en particular por un operador, si la primera imagen (60) o la segunda imagen (61) se reproduce como imagen en tiempo real y la otra imagen respectiva, es decir la segunda o primera imagen (respectivamente 61 y 60) ya tomada anteriormente en tiempo real, como imagen fija simultáneamente en el dispositivo de visualización (52).
Patentes similares o relacionadas:
Sistema y procedimiento para evaluar el riesgo asociado con un estado de glucosa, del 29 de Julio de 2020, de F. HOFFMANN-LA ROCHE AG: Un dispositivo informático configurado para realizar un procedimiento de análisis de un estado de glucosa, comprendiendo el procedimiento: identificar, […]
Procedimiento y aparato para proporcionar el procesamiento y control de datos en un sistema de comunicación médica, del 29 de Julio de 2020, de ABBOTT DIABETES CARE INC: U procedimiento, que comprende: ejecutar, en una unidad receptora , una rutina predeterminada asociada con una operación de un dispositivo de monitorización […]
 Dispositivo sensor para detección de señales bioeléctricas, del 29 de Julio de 2020, de CorTec GmbH: Dispositivo sensor para detectar senales bioelectricas y para implantar dentro o fuera de un cerebro, el dispositivo sensor que comprende […]
Dispositivo sensor para detección de señales bioeléctricas, del 29 de Julio de 2020, de CorTec GmbH: Dispositivo sensor para detectar senales bioelectricas y para implantar dentro o fuera de un cerebro, el dispositivo sensor que comprende […]
FUNDA ELECTRÓNICA PARA ADAPTACIÓN DE DISPOSITIVOS MÓVILES CON INSTRUMENTOS DE DIAGNÓSTICO MÉDICO MULTIDISCIPLINAR, del 27 de Julio de 2020, de RUESGA DELGADO,OSCAR: Funda electrónica para adaptación de dispositivos móviles con instrumentos de diagnóstico médico multidisciplinar que comprende una funda de uso electrónico […]
Cama eléctrica, del 8 de Julio de 2020, de Keeson Technology Corporation Limited: Una cama eléctrica, que comprende una estructura de cama, una pluralidad de láminas de cama, un dispositivo de despertador, un reloj y una caja de control […]
SÍSTEMA Y MÉTODO PARA EL TRATAMIENTO DE ADICCIONES DE UN INDIVIDUO QUE LO NECESITE, CON BAJAS TASAS DE RELAPSO, del 2 de Julio de 2020, de PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE: La invención corresponde a un sistema, más particularmente a un sistema NFB, y método, que permite el tratamiento de adicciones en las que está […]
Aparato y método de algometría humana, del 1 de Julio de 2020, de The Children's Research Institute: Un método implementado por el procesador para medir objetivamente el dolor que comprende: aplicar estimulación eléctrica de una intensidad específica […]
MAMÓGRAFO ÓPTICO QUE UTILIZA INFRARROJO CERCANO EN GEOMETRÍA DE REFLECTANCIA DIFUSA, del 25 de Junio de 2020, de CONSEJO NACIONAL DE INVESTIGACIONES CIENTIFICAS Y TECNICAS (CONICET) (33.3%): Un dispositivo formador de imágenes mamográficas para análisis y detección de posibles inhomogeneidades en el tejido mamario de una paciente usando […]