SISTEMAS Y MÉTODOS PARA EL CÁLCULO DE LA VELOCIDAD DE APROXIMACIÓN EN MANIOBRAS DE REABASTECIMIENTO AÉREO DE COMBUSTIBLE.
Sistemas y métodos para el cálculo de la velocidad de aproximación en maniobras de reabastecimiento aéreo de combustible.
Los sistemas comprenden: a) medios de captura (31) de una secuencia de fotogramas digitales del escenario de la operación de aproximación situados calibrados para poder conocer la distancia real correspondiente a un pixel de un fotograma; b) medios computacionales dispuestos para obtener las coordenadas de la trayectoria relativa de la aeronave receptora (11) respecto a la aeronave cisterna (13) mediante el proceso de una secuencia de fotogramas (35, 35', 35'', ...) de la operación de aproximación obtenida por dichos medios de captura (31) y calcular la diferencia de velocidad entre la aeronave receptora (11) y la aeronave cisterna (13) a partir de la trayectoria definida por las coordenadas registradas en el proceso b1). La invención también se refiere a los métodos para realizar el cálculo de la velocidad de aproximación.
Tipo: Patente de Invención. Resumen de patente/invención. Número de Solicitud: P201230854.
Solicitante: EADS CONSTRUCCIONES AERONAUTICAS, S.A..
Nacionalidad solicitante: España.
Inventor/es: COLL HERRERO,Francisca, MIRANDA ORTE,Jose María.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- B64D39/00 TECNICAS INDUSTRIALES DIVERSAS; TRANSPORTES. › B64 AERONAVES; AVIACION; ASTRONAUTICA. › B64D EQUIPAMIENTO INTERIOR O ACOPLABLE A AERONAVES; TRAJES DE VUELO; PARACAIDAS; DISPOSICIONES O MONTAJE DE GRUPOS MOTORES O DE TRANSMISIONES DE PROPULSION EN AERONAVES. › Repostaje en vuelo (llenado o vaciado de depósitos de combustible B64D 37/14).
- G01P3/38 FISICA. › G01 METROLOGIA; ENSAYOS. › G01P MEDIDA DE VELOCIDADES LINEALES O ANGULARES, DE LA ACELERACION, DECELERACION O DE CHOQUES; INDICACION DE LA PRESENCIA, AUSENCIA DE MOVIMIENTO; INDICACION DE DIRECCIÓN DE MOVIMIENTO (midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00; dispositivos de medida combinados para medir dos o más variables de un movimiento G01C 23/00; medida de la velocidad del sonido G01H 5/00; medida de la velocidad de la luz G01J 7/00; medida de la dirección o de la velocidad de objetos sólidos por reflexión o reradiación de ondas radio u otras ondas basada en los efectos de propagación, p. ej. el efecto Doppler, el tiempo de propagación, la dirección de propagación, G01S; medida de la velocidad de radiaciones nucleares G01T). › G01P 3/00 Medida de la velocidad lineal o angular; Medida de diferencias de velocidades lineales o angulares (G01P 5/00 - G01P 11/00 tienen prioridad; midiendo la velocidad angular utilizando efectos giroscópicos G01C 19/00). › utilizando medios fotográficos.
Fragmento de la descripción:
Sistemas y métodos para el cálculo de la velocidad de aproximación en maniobras de reabastecimiento aéreo de combustible
CAMPO DE LA INVENCIÓN
Esta invención se refiere en general al reabastecimiento aéreo de combustible en vuelo y, más en particular, al cálculo de la velocidad de aproximación de la aeronave receptora a la aeronave cisterna.
ANTECEDENTES
La Figura 1 ilustra un método conocido para realizar operaciones de reabastecimiento en vuelo que utiliza un dispositivo de manguera y cesta 15.
Este método de reabastecimiento emplea una manguera flexible 19 que se arrastra desde la aeronave cisterna 13. La cesta 21 es un accesorio que recuerda a un cono-veleta o que está unido por su final estrecho con una válvula a la manguera flexible 19. La cesta 21 estabiliza a la manguera 19 en vuelo y proporciona un canal que ayuda a la inserción de la sonda 25 de la aeronave receptora 11 en la manguera 19.
El dispositivo de manguera y cesta manguera 19 está conectado a una unidad de tambor situada en una góndola 17 de la aeronave cisterna 13 en la que se enrolla cuando no está en uso. La góndola 17 puede estar situada como se ilustra en la Figura 1 en un ala de la aeronave cisterna 13 aunque también puede estar situada en la parte trasera del fuselaje.
La sonda 25 de la aeronave receptora 11 es un brazo rígido situado en el fuselaje o en la nariz de la aeronave. La sonda 25 está normalmente retraída cuando no está en uso, particularmente en aviones de alta velocidad. Al final de la sonda 25 hay una válvula que está cerrada hasta que conecta con la manguera 19, tras lo cual se abre y permite el paso del combustible desde la aeronave cisterna 13 a la aeronave receptora 11.
La operación de aproximación de una aeronave receptora 11 a una aeronave cisterna 13 para proceder a una operación de reabastecimiento en vuelo es una operación delicada que si no se realiza adecuadamente puede dar lugar a aproximaciones fallidas o, incluso, a la ruptura de la válvula de paso del combustible impidiendo pues la operación de reabastecimiento de la aeronave receptora 11.
Uno de los aspectos relevantes de la operación de aproximación es el control de la velocidad diferencial entre la aeronave receptora y la aeronave cisterna que debe encontrarse dentro de un determinado rango para lo que suelen utilizar comunicaciones por radio entre las dos aeronaves. Eso tiene el inconveniente de que la aeronave cisterna no tiene una información continuada en tiempo real de la velocidad de aproximación de la aeronave receptora que le permita dirigir eficientemente la operación.
SUMARIO DE LA INVENCIÓN
Es un objeto de la presente invención proporcionar sistemas y métodos de bajo coste para calcular (especialmente en tiempo real) la diferencia de velocidad entre una aeronave receptora y una aeronave cisterna en una operación de aproximación para realizar una operación de reabastecimiento de combustible usando un dispositivo de manguera/cesta.
En un primer aspecto, ese objeto se consigue con un sistema que comprende medios de captura de una secuencia de fotogramas digitales de la operación de aproximación situados en un lugar de la aeronave cisterna que permita visualizarla lateralmente y medios computacionales dispuestos para obtener las coordenadas de la trayectoria relativa de la aeronave receptora respecto a la aeronave cisterna mediante el proceso de una secuencia de fotogramas de la operación de aproximación y para calcular a partir de dicha trayectoria la diferencia de velocidad entre la aeronave receptora y la aeronave cisterna. En dicho proceso, se elige una imagen de una parte de la aeronave que se utiliza como zona patrón de búsqueda en los sucesivos fotogramas. La búsqueda de la zona patrón en cada fotograma no se realiza en el conjunto de la imagen completa del fotograma sino dentro un marco de referencia de la zona patrón del fotograma anterior con su mismo centro y un tamaño definido por un factor de escala predeterminado.
En un segundo aspecto, el objeto antes mencionado se consigue mediante un método que comprende los siguientes pasos: a) obtener una secuencia de fotogramas digitales de la operación de aproximación desde un lugar de la aeronave cisterna que permita visualizarla lateralmente; b) obtener las coordenadas 2D de la trayectoria relativa de la aeronave receptora respecto a la aeronave cisterna; c) calcular la diferencia de velocidad entre la aeronave receptora y la aeronave cisterna a partir de dicha trayectoria. El paso b) comprende los siguientes sub-pasos: b1) seleccionar en el primer fotograma una zona patrón de la aeronave receptora de pequeño tamaño en la que visualice una parte de la aeronave receptora, obtener las coordenadas 2D de su centro e identificar un marco de referencia de la misma con su mismo centro igual forma y un tamaño superior al de la zona patrón en un factor de escala predeterminado; b2) buscar la zona patrón del fotograma anterior en el siguiente fotograma dentro del marco de referencia identificado en el fotograma anterior, utilizarla como nueva zona patrón, obtener y registrar las coordenadas 2D de su centro así como el instante temporal del fotograma e identificar y definir su marco de referencia; b3) repetir el sub-paso b2) para los demás fotogramas de la secuencia.
En aquellas aeronaves cisterna en las que el dispositivo de manguera/cesta se despliega desde una góndola situada en el ala de la aeronave cisterna los medios de captura de los fotogramas digitales (por ejemplo una cámara de vídeo) están situados en la parte trasera del fuselaje de la aeronave cisterna.
Ventajosamente, el cálculo de la diferencia de velocidad entre la aeronave receptora y la aeronave cisterna se realiza en tiempo real.
En una realización de la invención, la zona patrón y el marco de referencia tienen forma cuadrada y el factor de escala entre el número de pixels de cada lado del marco de referencia y de la zona patrón está comprendido entre 3 y 5.
Otras características deseables y ventajas de los sistemas y métodos para el cálculo de la velocidad de aproximación en maniobras de reabastecimiento aéreo de combustible según la invención se harán evidentes a partir de la siguiente descripción detallada de la invención y de las reivindicaciones adjuntas, en relación con los dibujos que se acompañan.
BREVE DESCRIPCION DE LOS DIBUJOS
La Figura 1 es una vista esquemática de una operación de reabastecimiento de combustible entre una aeronave cisterna y una aeronave receptora usando un dispositivo de manguera/cesta.
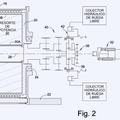
La Figura 2 es una vista inferior en planta de una aeronave cisterna ilustrando la posición del dispositivo de manguera/cesta y la posición de la cámara de vídeo utilizada en la presente invención.
La Figura 3 es una vista esquemática de una imagen del escenario de reabastecimiento.
La Figura 4 es una vista esquemática de una imagen del escenario de reabastecimiento ilustrando la zona patrón seleccionado para identificar a la aeronave receptora y un marco de referencia utilizado en el proceso de obtención de la velocidad de aproximación según la presente invención.
La Figura 4a es una vista esquemática de la imagen de la zona patrón.
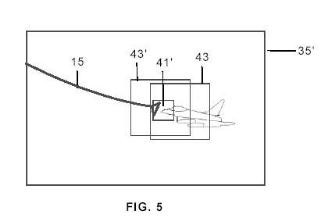
La Figura 5 es una vista esquemática de la imagen del escenario de reabastecimiento siguiente a la de la Figura 4.
La Figura 6 es una vista inferior en planta de una aeronave cisterna ilustrando la corrección angular que debe hacerse a la velocidad de aproximación.
DESCRIPCION DETALLADA DE LA INVENCIÓN
La Figura 2 muestra una aeronave cisterna 13 con una góndola 17 situada en un ala desde la que se despliega el dispositivo de reabastecimiento de manguera y cesta 15. En esa Figura se muestra también una cámara de vídeo 31 situada en la parte trasera del fuselaje de la aeronave cisterna 13 para capturar imágenes del escenario de reabastecimiento en torno a la cesta 21.
La Figura 3 muestra una imagen tomada por la cámara de video 31 en la puede verse una aeronave receptora 11 acercándose al dispositivo de manguera y cesta 15 de la aeronave cisterna 13.
La cámara de vídeo 31 debe estar calibrada para poder relacionar los pixels de la imagen con las distancias reales en el escenario del reabastecimiento. Esa calibración puede llevarse a cabo identificando en una imagen un objeto de dimensiones conocidas como por ejemplo la cesta 21.
La invención proporciona métodos y sistemas para obtener la velocidad diferencial entre la aeronave receptora 11 y la aeronave cisterna 13 procesando en un computador (no representado en las Figuras) ubicado en la aeronave cisterna 13 una secuencia de fotogramas proporcionada por la cámara de vídeo 31...
Reivindicaciones:
1. Sistema para calcular la diferencia de velocidad entre una aeronave receptora (11) y una aeronave cisterna (13) en una operación de aproximación para realizar una operación de reabastecimiento de combustible usando un dispositivo de manguera/cesta (15) , caracterizado porque comprende:
a) medios de captura (31) de una secuencia de fotogramas digitales del escenario de la operación de aproximación situados en un lugar de la aeronave cisterna (13) que permita visualizar lateralmente dicho escenario, estando dichos medios de captura (31) calibrados para poder conocer la distancia real correspondiente a un pixel de un fotograma;
b) medios computacionales dispuestos para:
b1) obtener las coordenadas de la trayectoria relativa de la aeronave receptora (11) respecto a la aeronave cisterna (13) mediante el proceso de una secuencia de fotogramas (35, 35’, 35’’, …) de la operación de aproximación obtenida por dichos medios de captura (31) en el que:
-tras la selección en el primer fotograma (35) de una zona patrón (41) de un tamaño predeterminado en la que se visualice una parte de la aeronave receptora (11) , el registro de las coordenadas 2D de su centro y la identificación de un marco de referencia (43) de la misma con su mismo centro, igual forma y un tamaño superior al de la zona patrón (41) en un factor de escala predeterminado,
- se identifica en cada fotograma posterior al primero (35’, 35’’, …) una nueva zona patrón (41’, 41’’, …) y un nuevo marco de referencia (43’, 43’’, …) de la misma, con las mismas características que en el primer fotograma (35) , buscando la imagen de la zona patrón (41, 41’, …) del fotograma anterior (35, 35’, …) en su marco de referencia (43, 43’, …) ,
-y se registran las coordenadas 2D del centro de la nueva zona patrón (41’, 41’’, …) y el instante temporal del fotograma;
b2) calcular la diferencia de velocidad entre la aeronave receptora (11) y la aeronave cisterna (13) a partir de la trayectoria definida por las coordenadas registradas en el proceso b1) .
2. Sistema según la reivindicación 1, en el que el dispositivo de manguera/cesta (15) se despliega desde una góndola (17) situada en el ala de la aeronave cisterna (13) y dichos medios de captura (31) están situados en la parte trasera del fuselaje de la aeronave cisterna (13) .
3. Sistema según cualquiera de las reivindicaciones 1-2, en el que el cálculo de la diferencia de velocidad entre la aeronave receptora (11) y la aeronave cisterna (13) se realiza en tiempo real.
4. Sistema según cualquiera de las reivindicaciones 1-3, en el que la zona patrón (41, 41’, …) y el marco de referencia (43, 43’, …) tienen forma cuadrada.
5. Sistema según la reivindicación 4, en el que el factor de escala entre el número de pixels de cada lado del marco de referencia (43, 43’, …) y de la zona patrón (41, 41’, …) está comprendido entre 3 y 5.
6. Método para calcular la diferencia de velocidad entre una aeronave receptora (11) y una aeronave cisterna (13) en una operación de aproximación para realizar una operación de reabastecimiento de combustible usando un dispositivo de manguera/cesta (15) , caracterizado porque comprende los siguientes pasos:
a) obtener una secuencia de fotogramas digitales (35, 35’, …) de la operación de aproximación desde un lugar de la aeronave cisterna (13) que permita visualizar lateralmente dicho escenario, conociendo la distancia real correspondiente a un pixel de un fotograma;
b) obtener las coordenadas 2D de la trayectoria relativa de la aeronave receptora (11) respecto a la aeronave cisterna (13) mostrada en dicha secuencia de fotogramas (35, 35’, …) mediante los siguientes subpasos:
b1) seleccionar en el primer fotograma (35) una zona patrón (41) de la aeronave receptora (11) de pequeño tamaño en la que visualice una parte de la aeronave receptora (11) , obtener y registrar las coordenadas 2D de su centro e identificar un marco de referencia (43) de la zona patrón (41) con su mismo centro, igual forma y un tamaño superior al de la zona patrón en un factor de escala predeterminado;
b2) buscar la zona patrón (41) del fotograma anterior (35) en el siguiente fotograma (35’) dentro del
marco de referencia (43) identificado en el fotograma anterior (35) y, una vez encontrada, utilizarla como nueva zona patrón (41’) , obtener y registrar las coordenadas 2D de su centro así como el instante temporal del fotograma (35’) e identificar y definir el marco de referencia (43’) de la nueva zona patrón (41’) de igual manera que en el sub-paso anterior; b3) repetir el sub-paso b2) para los demás fotogramas de la secuencia;
c) calcular la diferencia de velocidad entre la aeronave receptora (11) y la aeronave cisterna (13) a partir de la trayectoria definida por las coordenadas 2D del centro de cada zona patrón (41, 41’, 41’’, …)
registradas en el paso b) .
.
7. Método según la reivindicación 6, en el que el dispositivo de manguera/cesta (15) se despliega desde una góndola (17) situada en el ala de la aeronave cisterna (13) y los fotogramas (35, 35’, …) se obtienen desde la parte trasera del fuselaje de la aeronave cisterna (13) .
8. Método según cualquiera de las reivindicaciones 6-7, en el que se calcula en tiempo real la diferencia de velocidad entre la aeronave receptora (11) y la aeronave cisterna (13) .
1.
9. Método según cualquiera de las reivindicaciones 6-8, en el que la zona patrón (41, 41’, …) y el marco de referencia (43, 43’, …) tienen forma cuadrada.
10. Método según la reivindicación 9, en el que el factor de escala entre el número de pixels de cada lado del marco de referencia (43, 43’, …) y de la zona patrón (41, 41’, …) está comprendido entre 3 y 5.
Patentes similares o relacionadas:
Método y sistema de acoplamiento de aeronave, del 10 de Julio de 2019, de BAE SYSTEMS PLC: Un método para acoplar físicamente una primera aeronave y una segunda aeronave, la primera aeronave es una aeronave en vuelo, la segunda aeronave es una […]
Punta con detección de carga de boquilla y funcionalidad de comunicación inalámbrica para brazo extensible de repostaje, del 19 de Junio de 2019, de ISRAEL AEROSPACE INDUSTRIES LTD.: Un sistema de comunicación inalámbrica y de detección (WSCC) operativo junto con una aeronave repostada y una aeronave de repostaje, comprendiendo el sistema: una unidad […]
Sistema de control de un brazo de repostaje, del 27 de Marzo de 2019, de THE BOEING COMPANY: Un aparato para mover un brazo de repostaje en un avion cisterna , que comprende: un dispositivo de control que esta configurado para producir una […]
Sistema de detección de estado de conexión de un tubo para el trasvase de combustible, del 22 de Marzo de 2019, de Airbus Defence and Space SA: Boquilla para un tubo telescópico empleado en el reabastecimiento y trasvase de combustible en vuelo en un avión cisterna, dicha boquilla comprendiendo […]
 Dispositivo tensor para elevador de pluma de repostaje de aeronave, del 22 de Octubre de 2018, de MOOG INC.: Un aparato para aplicar tensión a un cable , cuando está conectado a una pluma de repostaje de aeronave, comprendiendo el aparato:
un árbol […]
Dispositivo tensor para elevador de pluma de repostaje de aeronave, del 22 de Octubre de 2018, de MOOG INC.: Un aparato para aplicar tensión a un cable , cuando está conectado a una pluma de repostaje de aeronave, comprendiendo el aparato:
un árbol […]
Sistema de reabastecimiento de combustible en vuelo de aeronaves, del 17 de Octubre de 2018, de Airbus Operations Limited: Un sistema de reabastecimiento de combustible en vuelo de aeronaves que incluye una pluralidad de tanques de combustible , conectados de manera […]
Método y sistema de indicación para reabastecimiento en vuelo, del 13 de Septiembre de 2018, de Airbus Defence and Space SA: Sistema de indicación para el reabastecimiento en vuelo que comprende: - una pantalla adaptada para ser transportada por una aeronave cisterna […]
Sistema doble 3D para obtener una imagen aumentada del sector de interés de la escena de trabajo en las operaciones de control basadas en imágenes 3D, del 8 de Febrero de 2018, de DEFENSYA INGENIERÍA INTERNACIONAL, S.L: 1. Sistema doble 3D para obtener una imagen aumentada del sector de interés de la escena de trabajo en operaciones de control basadas en imágenes […]